AN/SPY-6(AMDR/EASR)相位陣列雷達
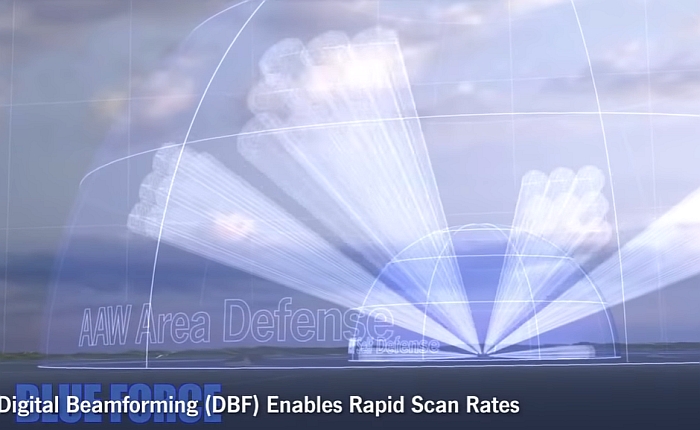
洛馬集團競爭美國海軍AMDR先進防空雷達項目時的數位波束成形雷達示意圖。AMDR使用數位波束成形
(DBF),每個陣面同時產生多個筆狀雷達,在空間中縱向與橫向排列,堆積成一個大型波束並進行水平與
垂直向掃描。相較於傳統單一筆狀窄波,由數位成形控制的多波束堆疊能更快速有效地進行空間體積搜索,
同時進行反彈道飛彈、區域防空等任務。

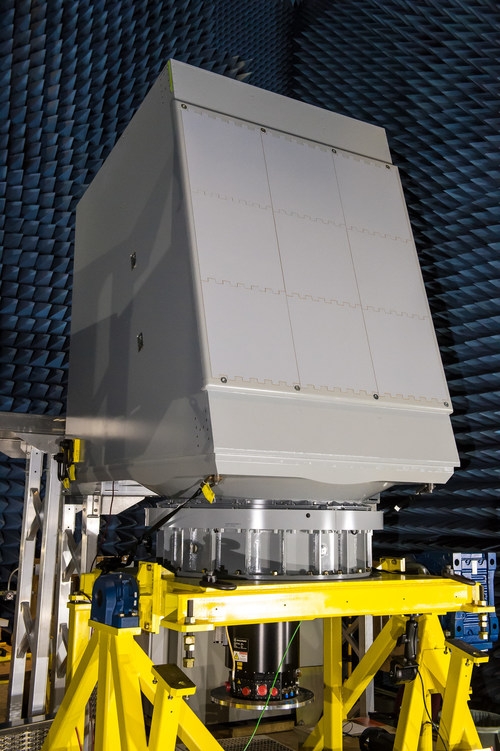
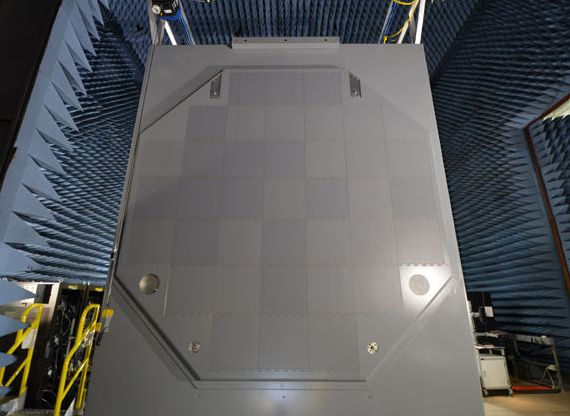
在電磁波暗室裡進行組裝的SPY-6 AMDR工程原型天線 ,此時陣面上大約一半的雷達模組總成
(RMA)安裝完成。

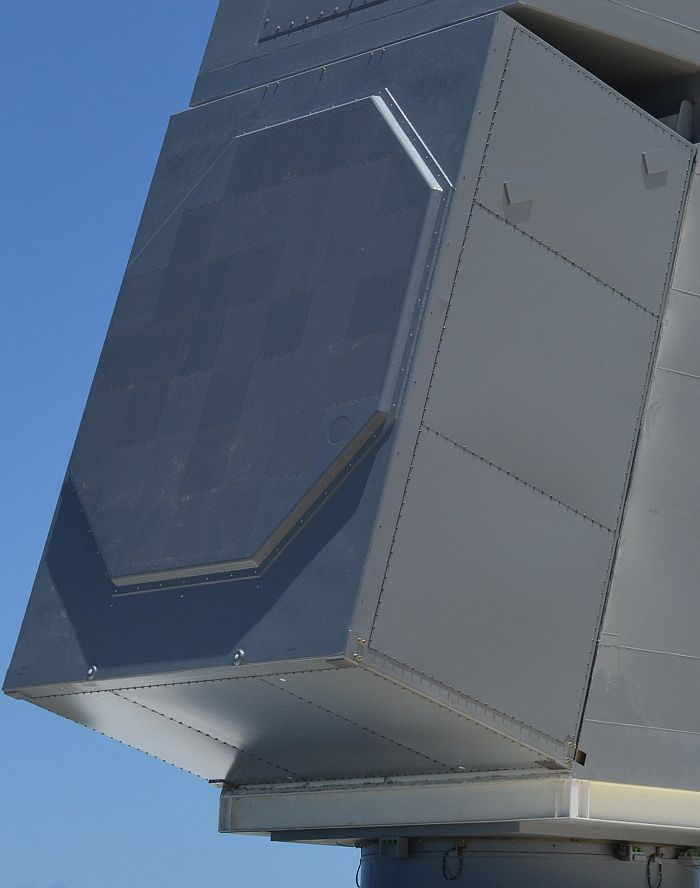
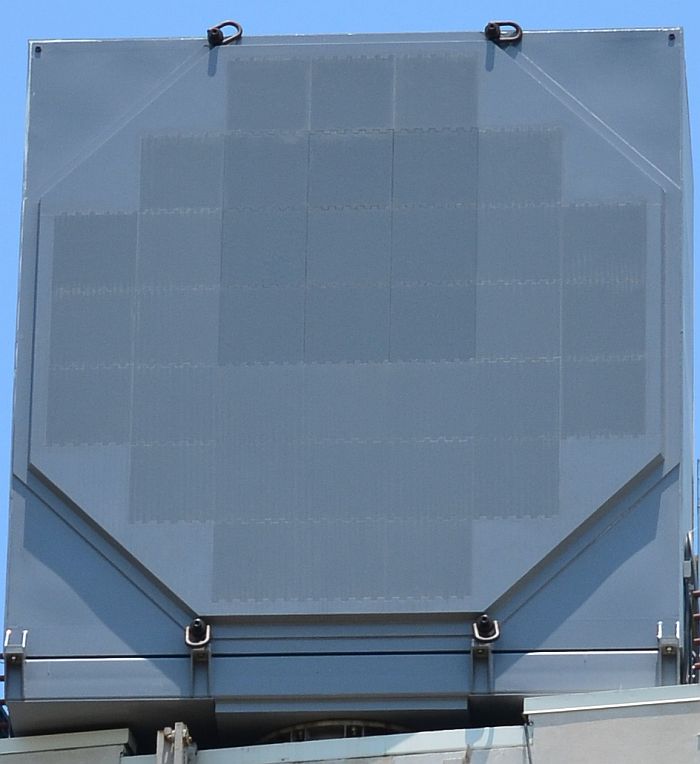
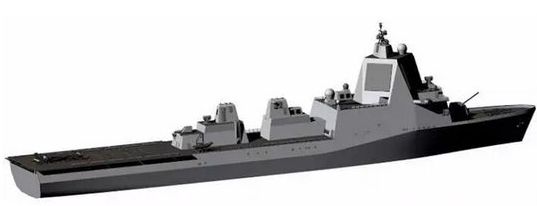
(上與下)在2016年7月初,雷松集團將第一套完整的SPY-6 AMDR交付位於夏威夷的美國海軍飛彈測試場,
在接下來一年內進行實際測試,包含探測、飛彈射控、防空作戰與反彈道飛彈等測試科目。
注意到此雷達結構包含下方的AMDR S波段主陣面以及頂部修改自SPQ-9B的X波段近程追蹤雷達。
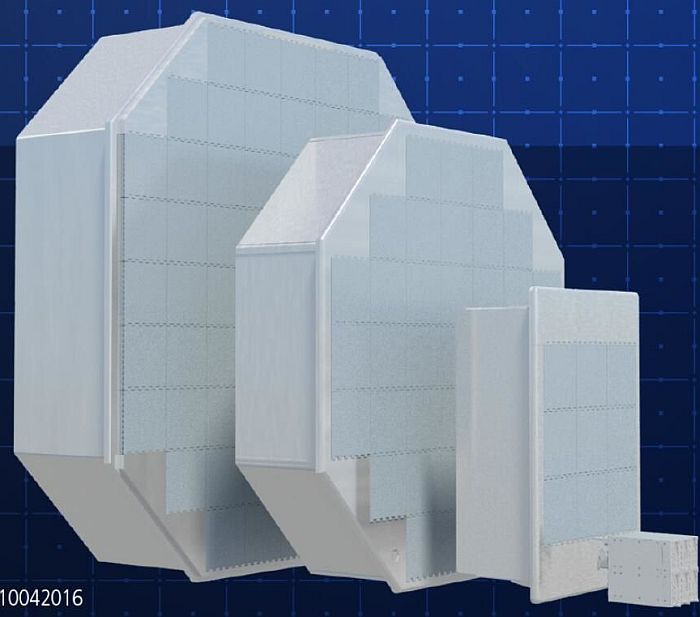
雷松的AMDR/EASR系列示意圖。畫面中的三種陣面都由相同的RMA單元構成,
RMA的數量多寡決定了雷達陣面的孔徑、發射功率與性能。中間的是柏克Flight 3採用的SPY-6,
陣面由37個RMA構成,最右邊的則是EASR雷達,陣面只有9個RMA。

(上與下)雷松集團測試、供柏克Flight3驅逐艦使用的SPY-6 AMDR雷達陣面 ,屬於AN/SPY-6(V)1構型。
此照片清楚顯示陣面由37個長、寬皆為2英尺的RMA單元構成。

(上與下) 在2018年8月,雷松在麻薩諸塞州安多佛的新雷達發展設施(Radar Development Facility)啟用,
用來生產/組裝/測試AN/SPY-6相位陣列雷達。廠區內的移動、搬運全面仰賴全自動化的智慧機器人。

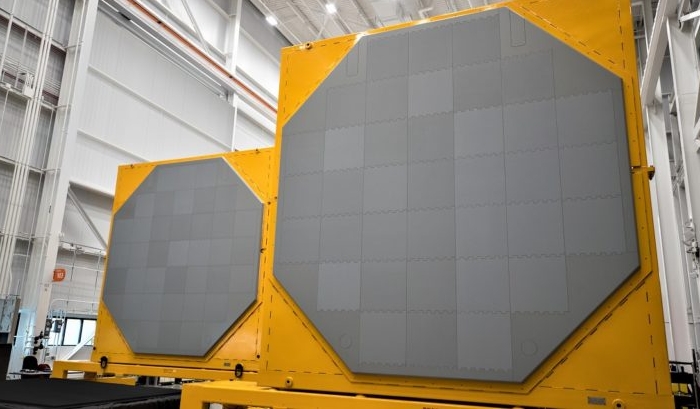
在雷松麻薩諸塞州雷達發展設施廠房設施的兩個AN/SPY-6(V)1陣面,用於第一艘柏克Flight 3飛彈驅逐艦
傑克.盧卡斯號(USS Jack H. Lucas, DDG-125)
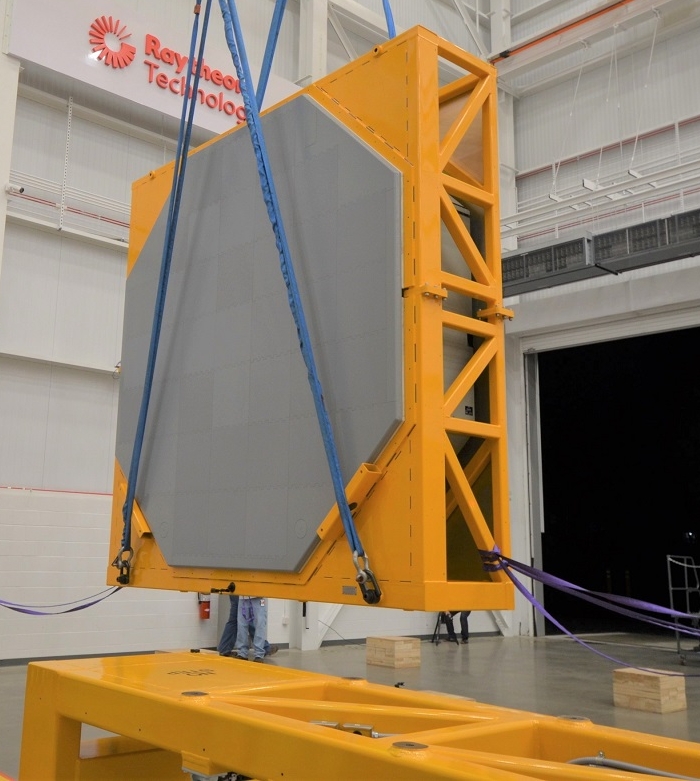
雷松在2020年7月在麻薩諸塞州安多佛出場的第一組AN/SPY-6(V)1陣面

2021年6月4日,柏克Flight 3首艦傑克.盧卡斯號(USS Jack H. Lucas, DDG-125)下水。
注意艦橋兩側的AN/SPY-6(V)1相位陣列雷達的安裝座,面積比先前AN/SPY-1D更大。

柏克Flight 3首艦傑克.盧卡斯號(DDG-125)於2022年3月26日舉行命名洗禮儀式的照片。
此時主桅杆頂的AN/SPQ-9B X波段雷達已經安裝,AN/SPY-6(V)1相位陣列雷達尚未安裝

柏克Flight 3首艦傑克.盧卡斯號(DDG-125),攝於2022年8月左右;艦橋左側的AN/SPY-6(V)1雷達
陣面已經安裝。
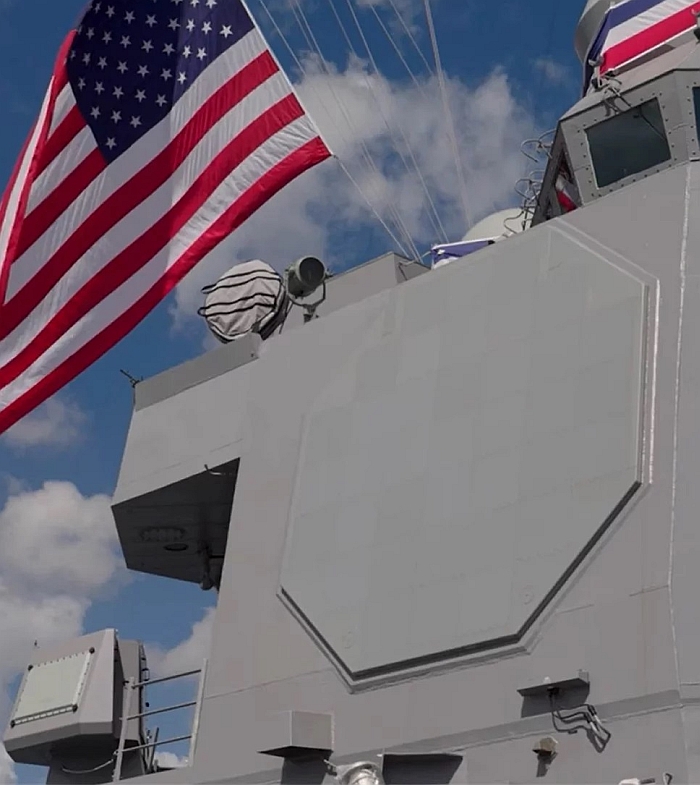
柏克Flight 3首艦傑克.盧卡斯號(DDG-125)船樓左側的AN/SPY-6(V)1相位陣列雷達

安裝在夏威夷太平洋飛彈測試場設施的AN/SPY-6(V)4雷達(含頂部AN/SPQ-9B X波段雷達),在2025年8月
下旬完成首次海洋環境追蹤測試。AN/SPY-6(V)4的陣面由24個RMA構成,用於升級現役的柏克級飛彈驅逐艦。
──By Captain Picard
參考資料:軍事連線90期──美國海軍AMDR雙波段雷達的起源與發展(張明德著)
|
AN/SPY-6(AMDR-S)各種構型 |
||||
| 型號 | 陣面形式 | 陣面規模(RMA數量) | 整體信噪比(以AN/SPY-1D(V)為基準) | 使用船艦 |
| AN/SPY-6(V)1 | 固定式陣面 x 4 | 37 | 原訂+15dB,實際+20dB | 柏克Flight 3(DDG-125~) |
| AN/SPY-6(V)2 | 旋轉式陣面 x 1 | 9 | 原訂+0dB | 新造大型兩棲艦艇(LHA-8~、LPD-29~) 換裝現有航空母艦、大型兩棲艦的AN/SPS-48、AN/SPS-49 |
| AN/SPY-6(V)3 | 固定式陣面 x 3 | 9 | 原訂+0dB | 新造航空母艦(CVN-79~) FFG(X)飛彈巡防艦 |
| AN/SPY-6(V)4 | 固定式陣面 x 4 | 24 | 原訂+11dB,實際+15dB | 柏克Flight 1/2升級 |
|
對空與飛彈防禦雷達(AMDR) 在1999年起,美國海軍就以固態SPY雷達(Solid State SPY Radar,SS-SPY)的名義,資助洛馬集團以神盾艦的SPY-1相位陣列雷達為基礎,研究新一代的S波段主動相位陣列雷達(詳見SPY-1相位陣列雷達一文),此計畫隨後又演變成S波段先進雷達(S-Band Advanced Radar,SBAR)以及可變固態S頻雷達(Scalable Solid-State S-Band Radar,S4R)等。 當美國海軍開始發展雙波段雷達系統(Dual Band Radar,DBR)同時,美國海軍研究辦公室(Office of Naval Research,ONR)也在2000財年展開一項名為數位化陣列雷達(Digital Array Radar,DAR)的基礎研究,研發數位化波束成形(Digital Beamforming,DBF)的相位陣列雷達,研究目標包括改善時間-能量管理(time-energy management)、信號與雜波(signal-to-clutter,S/C)比例、提高可靠度、減少壽命週期程本等,例如希望透過DBF技術將雷達的動態範圍(Dynamic Range,即靈敏度)提高30分貝(約1000倍),其他。DAR項目的一大目標,是研究滿足彈道飛彈防禦(Ballistic Missile Defense,BMD)的高性能防空雷達。在DAR項目中,ONR資助業界與學術界進行相關基礎研究,包括海軍研究學校(Naval Postgraduate School)等。在1980年代,美國海軍就曾推動過名為DAR的研究計畫,研發數位化相位陣列雷達計畫,參與研究的主要單位包括美國海軍研究實驗室(Naval Research Laboratory,NRL)、美國海軍水面作戰中心(Naval Surface Warfare Center,NSWC)以及麻省理工學院(Massachusetts Institute of Technology,MIT)的林肯實驗室(Lincoln Laboratory)。 在2006年,美國海軍開始規劃CG(X)防空巡洋艦所需的雷達系統,委託洛馬海上系統與感測器部門、雷松整合防衛、諾格電子系統等三家廠商進行需求定義工作,同時進行相關技術和降低風險等研究,相關工作耗時約一年。萬一發展不順利,美國海軍還打算以既有的AN/SPY-3多功能雷達(MFR)為基礎發展備案。 在2007年初,對空與飛彈防禦雷達(Air and Missile Defense Radar,AMDR )正式成為CG(X)防空巡洋艦的雷達項目,功能包括探測、搜索與追蹤各種空中目標(包含飛機、飛彈),並支援防空飛彈的接戰工作,在高威脅環境中有效防禦任何空中威脅(包含一般戰術空中威脅與彈道飛彈等)。 依照慣例,AMDR進行時,美國海軍也一併提出幾個風險較低的方案一同評估,包括次世代海軍防空系統(Next-Generation Maritime Air & Missile Defense);多功能先進主動相位陣列雷達(Multi-Function Advanced Active Phased-Array Radar )等,而先前洛馬集團的SBAR/S4R也在考量之列。AMDR的整合開發工作由美國海軍水面武器系統計畫執行辦公室2.0(PEO IWS 2.0)負責,神盾系統的整合工作則由PEO IWS 1.0辦公室負責。在2008財年的預算中,美國海軍建立先進上感測器計畫項目(Advanced Above Water Sensors),包含AMDR等相關計畫。 AMDR架構 與先前已經在開發的DBR雙波段雷達(由SPY-4 VSR與SPY-3 MFR構成)的系統架構相似,AMDR也是一種雙頻雷達系統,由一部S波段長程雷達(AMDR-S)、一部X波段中/短程多功能雷達 (AMDR-X)構成,兩者的接收信號先由信號/資料處理器(Signal Data Processor,SDP)處理,然後輸出到雷達組件控制器(Radar Suite Controller,RSC)進行統一的管理與資料處理。AMDR-S雷達負責長距離搜索、追蹤、彈道飛彈防禦以及防空飛彈升空之後的上/下鏈傳輸功能等;而AMDR-X則進行中短程 對空/對海搜索、精確追蹤、飛彈上/下鏈傳輸以及終端射控照明等工作 。AMDR的任務涵蓋船艦周遭的區域對空/對海偵測、遠距離長程對空以及外大氣層偵測(搜索彈道飛彈),功能包括搜索監視、目標追蹤、精確追蹤彈道飛彈軌跡等 。AMDR計畫一開始就納入了彈道飛彈防禦與區域空中作戰(BMD and Area AAW,TAMD)的需求,這是與先前DBR雙波段雷達系統的最大區別──原本DBR仍針對傳統的艦隊防空,設定的對象如DDG-1000、CVN(X)航空母艦也都不是專業的防空作戰艦艇,VSR長程雷達 自然也沒有納入反彈道飛彈能力的考量。 AMDR採用開放式系統架構,無論是雷達硬體(如雷達型號、主動天線陣列數量)或後端處理系統都能輕易變更或擴充,因應不同的載台尺寸而調整系統規模,並利於服役全壽期的維護與升級作業;為了節省成本,AMDR將盡可能採用已經開發成熟的硬體架構與商規組件。 為了易於維修,AMDR的電路組件將比現有雷達更少且更經濟,透過軟體的創新來減少對硬體零組件的需求。 AMDR-S是AMDR計畫的開發核心,以前述美國海軍研究辦公室的DAR數位雷達研究項目為技術基礎。AMDR-S是一種採用全固態組件、使用數位化波束成形(DBF)技術的主動相位陣列雷達,操作波段為S頻(操作頻寬將超越既有的AN/SPY-1),被要求具有良好的抗干擾、過濾雜波能力,並能在惡劣海象、天候之下仍能追蹤新一代低雷達截面積空中物體(Very Low Observable / Very Low Flyer,VLO/VLF)。為了強化遠程搜索、彈道飛彈偵測以及對付低雷達截面積目標,AMDR-S自然著重於提高功率,然而這意味著載台需要提供更高的電源功率以及冷卻能力,使船艦體積、排水量與造價都大福成長;因應這項難題,AMDR-S一項技術重點就是開發新型功率擴大器(Power amplifier),在滿足功率需求的前提下,盡可能減低系統的體積重量。 值得一提的是,由於AMDR以防空和反彈道飛彈任務為主,對遠距離精確探測的需求比先前DBR雷達系統更嚴苛,因此S波段雷達仍採用傳統上四面陣列天線的配置,而不是DBR雷達的三陣列配置。 AMDR-S的主要關鍵技術包括:
1.高能放大器和發射/接收(T/R)模組,功率密度與散熱性能比砷化鎵(GaAs)更好的氮化鎵(GaN)半導體技術。
與GaAs半導體製作的T/R器件相較,GaN組件的功率密度提高5至10倍,承受的工作電壓、電流是前者的兩倍以上,熱傳導效率也提高7倍。AMDR系統中仍有若干組件採用砷化鎵半導體技術。 在上述技術中,大孔徑數位波束成形(DBF)堪稱AMDR的最大技術難題。藉由程式控制的 全數位化波束成形與控制技術(過去相位陣列雷達的波束成形是透過類比電路的移相器進行,AMDR的收/發波束成形與控制則實現全數位化。透過DBF控制,AMDR的陣列天線能同時產生多個發射/接收多道波束(multi-beam),在空間堆疊成一個水平與垂直範圍更大的波束進行垂直與水平向掃描。傳統相位陣列雷達通常同時間只能發射一道筆狀窄波束來進行水平與垂直向掃描,藉由極高的切換速度分配給不同的工作;而AMDR的多波束涵蓋範圍更大,能更快完成空間掃描,在大範圍體積搜索(volume search)比單一窄波更有效,能不間斷地同時在空域中執行防空偵測、反彈道飛彈、飛彈射控等不同任務。AMDR雷達產生的數位成形多波束是在二維空間(水平與垂直軸向)排列,波束排列方式是由軟體自行控制,能根據不同任務生成最優化的堆疊波束(例如體積搜索時就用橫向/縱向堆疊的波束,兼顧水平與垂直的搜索角度;著重水平面搜索時可將波束完全在水平向以扇形排列,將水平涵蓋範圍最大化)。AMDR是美國首次在天線尺寸這麼大的雷達上應用數位成形多波束技術。 相較於VSR雷達,AMDR的天線發射/接收單元(T/R)要求的功率更高,效率(產生額定功率所需的電力與冷卻需求)也比VSR高出10%。為了達成功率需求,AMDR以氮化鎵 (GaN)半導體技術來製作T/R單元,然而這也是世界上首次在AMDR這樣的大孔徑陣面上應用氮化鎵半導體技術,存在不少技術風險(過去沒有氮化鎵半導體技術的T/R組件在長時間高功率輸出下的性能與可靠度等相關經驗)。 由於2008年金融海嘯造成的重創,美國在2008年7月將DDG-1000驅逐艦的產量大砍為二至三艘,CG(X)巡洋艦也在美國海軍於2011年度編列的「30年造艦計畫」中消失;雖然如此,AMDR持續進行。被美國海軍用來填補DDG-1000的第三批伯克級飛彈驅逐艦, 就打算採用AMDR S頻雷達來取代現有的AN/SPY-1D(V)雷達。依照美國海軍估計,在不大幅修改柏克級艦體設計的前提下,所能搭載的AMDR S頻雷達的天線直徑最多可達14英尺級(4.27m),超過SPY-1D(V)的12英尺級(3.66m) 。
美國海軍現有艦艇設計中,只有聖安東尼奧級船塢運輸艦的平台足以容納 直徑22英尺級(6.7m)的AMDR相位陣列雷達。 延遲的X波段雷達 在X波段部分,AMDR中的AMDR-X計畫使用一部兼具多種功能的相位陣列雷達(含對空/對海搜索、目標追蹤、識別、航空管制、探測水面潛望鏡與小型目標等) ,天線陣面尺寸約4x6英尺,而雷松 集團已經開發完成的SPY-3是最有可能的候選者。不過值得注意的是,根據若干柏克Flight 3的構型模型,即便配備AMDR-X之後,仍裝備原有的三座SPG-62照明雷達 。一個可能原因是SPY-3為雷達飛彈提供照明的距離較低,無法滿足神盾艦長距離防空接戰的要求(神盾艦艇使用的增程型SM-2 Block 4與SM-6的最大有效射程在240km以上);另外,在原本神盾系統架構之下,SPG-62只是單純的僕役照射器,MK-99飛彈射控系統根據SPY-1雷達指示的方位直接指揮SPG-62對特定位置發送照射波,而如果照射功能改由AMDR-X這樣一部真正的X波段雷達來負責,神盾系統的射控機制勢必要做較大幅度的改變。 基於以上原因,AMDR-X可能直接刪除為飛彈提供照明的功能。 考量到柏克Flight 3的艦體載台排水量餘裕有限,如果在AMDR-S長程雷達之餘再加裝一套X波段 相位陣列雷達,艦體排水量與載重餘裕將所剩無幾;此外,裝備X波段相位陣列雷達將使柏克Flight 3的成本進一步攀高,對於2010年代面臨嚴峻預算刪減的美國海軍並非好事。在美國審計署(GAO)於2010年3月發佈的主要國防採購計畫審查報告中,就提到AMDR雷達系統初期會以SPQ-9B作為X波段雷達,而AMDR-X相位陣列雷達的開發與競標工作會在較晚的時候開始。原本美國海軍打算在2011年對廠商發出需求徵詢書(RFP),但實際上沒有進行。 2012年4月,美國海軍正式決定擱置AMDR-X相位陣列雷達的開發工作,2016財年訂購的前12艘柏克Flight 3(DDG-123~134)使用簡化的雷達構型,以一部修改過的AN/SPQ-9B追蹤雷達作為AMDR的X波段雷達(與AMDR-S共用RSC雷達控制組件) ,安裝在主桅杆頂端,而AMDR-S取代原本的SPY-1D;由於SPQ-9B系統與原本定義的AMDR-X不同,AMDR的後端相關軟體必須做對應修改。 而後續至少10艘柏克Flight 3(13號艦開始)則可能會以一種新開發的X頻雷達來取代AN/SPQ-9B。在2017年8月,美國海軍研究辦公室(ONR)下達未來X波段雷達的信息徵詢書(RFI)。在2018年3月7日,ONR宣布與雷松簽署價值1999.7萬美元的固定價格合約,用於包括AMDR、NGJ和可擴展X波段雷達的研發工作。此種新型X波段艦載雷達應為一種主動相位陣列雷達,採用氮化鎵(GaN)半導體技術的T/R射頻組件、數位波束成形技術(DBF)以及模組化的系統架構等;這個新的X波段雷達計畫稱為企業X波段照射雷達(EXI)。 在2022年1月初首次公布的DDG(X)飛彈驅逐艦項目概念設計中,初期沿用AN/SPQ-9B X波段雷達,隨後打算以「未來X波段雷達」(FXR)替換SPQ-9B;FXR應為主動相位陣列雷達,但仍不包含射控照明功能。從2020年夏季開始,美國海軍水面作戰中心達爾格倫分部(NSWC Dahlgren Division)展開未來X頻雷達(Future X-Band Radar,FXR)的降低風險測試研究。 AMDR計畫時程 1.競標過程 美國海軍在2006年到2007年委由洛馬海上系統與感測器部門、雷松整合防衛系統(IDS)、諾格電子系統等三家廠商進行AMDR的需求定義、降低風險等研究工作,因此這三家廠商 隨後成為AMDR的競爭者。在2009年6月26日,美國海軍分別與這三家廠商簽署AMDR的概念研究合約 (以S波段雷達以及組合式雷達控制器為重點),三份合約總值3000萬美元 ,其中與雷松簽署的合約約為990萬美元,與洛馬、諾格的合約為1000萬美元 。 這三家競標者中,雷松擁有最豐富的雙波段雷達系統整合開發經驗,該集團是哈沃德.勞倫茲號(USNS Howard O. Lorenzen)飛彈觀測艦的Cobra King S/X雙波段相位陣列雷達的主承包商,負責CBE後端系統以及X波段雷達;此外,在DBR相位陣列雷達計畫中,雷松也負責開發X波段相位陣列雷達以及負責控制的信號資料處理器(SDP)。除此之外,雷松也是美國現役主要的彈道飛彈預警雷達承包商,實績包括戰區高空層飛彈防禦(THAAD)系統的TPY-2雷達、部署在大型鑽由平台的SBX-1 X波段海基探測雷達以及美國空軍部署在陸地上的FPS-108 Cobra Dane與FPS-115 PAVE PAWS彈道飛彈預警雷達。雖然前述雷達系統都不包括S波段,但雷松其實負責供應SPY-1相位陣列雷達的S波段發射機。另外,在T/R組件所需的氮化鎵(GaN)半導體技術上,雷神也在美國相關業界中領先。 洛馬集團的主要優勢在於是現役神盾作戰系統和SPY-1相位陣列雷達的主承包商,從1990年代末期就以SPY-1為基礎開發固態組件版SPY主動相位陣列雷達,同時也是DBR雷達系統中的SPY-4 VSR S波段相位陣列雷達的承包商。因此,洛馬集團是所有競爭者中開發S波段雷達經驗最豐富者,不過對於X波段雷達以及反彈道飛彈預警雷達的經驗較為缺乏;此外,洛馬集團在SPY-4 VSR雷達研製過城中出現時程大幅落後與成本超支等問題,雖然最後性能符合指標,然而似乎顯示該公司的計畫管理與成本控制不盡理想。早期外界有聲音懷疑,美國海軍最終必定選擇神盾系統的主承包商的洛馬來開發AMDR,公開競標只是個幌子。 諾格電子系統部門則以機載和陸基主動相位陣列雷達的發展經驗開發AMDR, 主要是諾格為美國海軍陸戰隊開發的AN/TPS-80 G/ATOR X波段雷達(使用GaN半導體技術的T/R單元,在2016年投入使用)取得的最新研發成果 ;此外,諾格也是AN/SPQ-9B X波段艦載追蹤雷達的供應商。不過,先前諾格電子系統部門在相位陣列雷達領域主要都是為戰鬥機提供的小型系統,例如F-22的APG-77與F-35的APG-81雷達等,在艦載雷達領域的成就不如洛馬跟雷松;為了彌補這項弱點,諾格與澳洲CEA集團(曾研發CEA-FAR/Mount等 艦載主動相位陣列雷達系列)進行合作。在2006年3月,諾格就與CEA簽署合作協議,合作推廣CEA的主動相位陣列雷達系列。 在2010年9月,AMDR從概念研究階段正式進入技術發展階段 (Technical Development);在9月30日,美國海軍分別與洛馬、諾格與雷松簽署AMDR的AMDR-S相位陣列雷達和RSC雷達控制組件發展合約,洛馬集團獲得的合約總值為1192萬美元,雷松集團獲得1123萬美元的合約,而諾格集團獲得的合約價值則為1200萬美元。 在2011年5月19日,雷松宣布製造出第一個AMDR-S雷達的S頻T/R收發單元 (由GaN半導體製造);隨後在6月7日,雷松宣布展開AMDR的系統需求審查(System Requirements Review,SRR),正式進入AMDR的里程碑B工程發展階段,此時該公司正進行RSC雷達組件控制單元進行技術演示。在2011年9月19日,雷松 宣布,其第一個AMDR-S雷達的S頻T/R收發單元已經通過全面測試,經過1000小時運轉後其性能沒有任何衰減,證實其性能表現完全符合或超過AMDR計畫的要求,也代表雷松已經為AMDR里程碑C(初期低量生產)做好了準備。 在2012年7月中旬,諾格與洛馬集團都已經交付AMDR-S的概念設計。至2011年12月 底,諾格集團宣布完成AMDR的系統功能審查(System Functional Review,SFR),驗證其主要設計已經成熟,並在數週之後完成測試審查(Test Readiness Review,TRR),對各項技術的測試工作準備就緒;在SFR程序之中,諾格集團的AMDR使用數位波束成形以及先進戰術控制軟體,其後段的RSC雷達組件控制單元還控制另一個早期預警雷達,整套雷達系統成功地捕捉了空中的目標。在2012年9月10日,諾格集團宣布其AMDR原型成功完成初始偵蒐距離測試,包括數位波束成形、波束轉向與可靠性等,隨後在諾格集團Baltimore雷達測試場也成功地進行了全功率運轉展示。 到2011年中,洛馬已經驗證了該集團S波段數位相控陣雷達的波束成形能力,證實此種先進雷達的技術已經趨於成熟,能部署在柏克Flight 3上。 到了2012年6月30日,三家AMDR競爭廠商向美國海軍提交正式的AMDR-S工程製造發展(Engineering and Manufacturing Development,EMD)提案,都採用基於氮化鎵(GaN)半導體製造的T/R模組,並採用模組化架構來擴展、縮減系統規模來適應大小不同的艦艇平台。 依照美國國會審計組織(GAO)在2013年初以前的計算,估計AMDR的研發成本為11億9000萬美元,生產購置成本以22套為基準(當時準備建造22艘柏克Flight 3)則為45億9000萬美元,合計總成本將達57億9000萬美元左右;而美國海軍的估計則認為AMDR的研發作業需要22億美元,並花費132億美元購置24套。然而到了2013財年,GAO刪減AMDR的總預算近100億美元;依照此時估計,AMDR項目將製造22套系統來裝備柏克Flight 3,總價65.98億美元,平均每套量產型的價格估計將近3億美元。依照2013年左右AMDR的計畫時程,AMDR項目在2013年5月通過里程碑B(Milestone B)審查 ,選擇承包商並進入工程發展(Engineering and Manufacturing Development,EMD)階段,2013年11月進入里程碑C(Milestone C)設計審查階段以及初期少量生產(Low-Rate Initial Production,LRIP)作業的決策規劃,2016財年展開AMDR的採購作業來裝備首艘柏克Flight 3,在2017財年進入初期少量生產階段(日後實際上於2017年4月進入LRIP,比原計畫提前四個月),第一套於2019年交付美國海軍,在2021年12月在船艦上展開實戰操作測試(OT),並在2023年3月達到初始作戰能力(IOC)。 2.雷松獲勝 在2013年9月,AMDR通過國防部採購委員會(DAB)的milestone-B審查,準備進入工程製造發展(EMD)階段,接下來就是要決定承包商。在2013年10月10日,美國海軍正式 宣布雷松成為AMDR的主承包商,隨即獲得美國海軍價值3億8574萬2176美元的工程發展階段(EMD)合約,執行期45個月,屬於加激勵合約(cost-plus-incentive-fee contract),包括對AMDR-S以及RSC雷達組件控制單元的設計、發展、系統整合、測試;此外,此合約還包括2017財年的里程碑C初期少量生產階段 (LRIP)的優先選擇權,如果簽署,則雷松獲得的合約總值(含EMD階段)將達到16億3336萬3781美元。 由於初期AMDR將結合諾格的SPQ-9B X波段雷達,因此諾格集團也將參與AMDR的發展合約。 而原本神盾系統AN/SPY-1相位陣列雷達的主承包商洛馬集團在競爭失敗後,隨即 在2013年10月22日向美國海軍發出了正式的抗議,認為洛馬集團交付了完善的工程方案以及相當合理的報價,但在審查過程中沒有獲得美國海軍公正的對待;隨後,美國政府審計組織(GAO)將暫停與雷松的簽約,並在100天內對競標過程進行調查,結果在2014年1月底揭曉。 在2014年1月13日,洛馬集團宣布撤銷抗議,而此抗議並沒有拖延AMDR計畫的相關進度。 3.進入工程發展階段,獲得正式型號AN/SPY-6 在2014年7月23日,雷松宣布AMDR通過初步設計審查( Preliminary Design Review,PDR)與整合基線審查(Integrated Baseline Review),正式進入工程發展階段(Engineering and Manufacturing Development ,EMD)。AMDR在2014年5月21日進行硬體初步設計審查(Hardware Preliminary Design Reviews),在2014年8月27日通過系統初步設計審查(Systems Preliminary Design Reviews)。 在2014年10月24日,美國海軍為AMDR賦予SPY-6(V)的正式編號,柏克Flight 3使用的版本稱為AN/SPY-6(V)1。 在2014年12月3日,美國海軍與雷松公司成功完成了一個關於AMDR硬體的關鍵設計審查 (Critical Design Review,CDR),這是建立基線設計的基礎,演示了所有技術性能評量( Technical Performance Measures),也證明硬體設計成熟度以經足以開始製造AMDR的工程發展原型(Engineering Development Model,EDM);此時,美國海軍已經完成AMDR軟體四個Build階段的第一個(Build 1)。在EMD階段中,雷松會製造第一個完整的AMDR的RMA單元,然後以此為基礎發展出一個擁有完整功能的AN/SPY-6雷達縮尺單元(只有一個RMA),包含後端軟體。第一個有完整功能並在迴路中(Hardware in the Loop,HWIL)的AMDR陣列單元安裝在麻薩朱塞州的薩德伯里(Sudbury, Massachusetts)的設施進行測試。 在EMD階段,需要生產超過45000個GaN與GaAs半導體技術的微波積體電路組件,以及400個T/R單元,隨後要繼續製造1000個T/R單元。 在2015年5月中旬,雷松宣布完成對AN/SPY-6 AMDR雷達的關鍵設計審查(CDR),項目包括硬體規格、軟體開發、降低風險、可量產性分析、項目管理、測試與進度評估、成本評估等,證實其設計與技術成熟、能付諸量產並降低風險,可望在符合時程、預算之下滿足預定的性能指標;此時,AMDR的EMD階段已經完成超過40%。雷松表示,該集團在AMDR計畫實施了敏捷的研發和管理方法,是AMDR專案至此相當成功順利的主因;此種執行方式能持續支持軟體與硬體的設計驗證、技術成熟度、可生產性和降低風險等,對AMDR的生產、質量和成本可負擔性等都有好處。 在2015年7月29日,AMDR的次承包商Major Tool and Machine將第一套AN/SPY-6(V)的框架結構交付雷松,雷松在同年9月1日之前將所有的被動射頻組件安裝在框架結構上;第一個RMA在2015年10月正式啟動並開始測試;所有的RMA底座(含電力供應、冷卻管線、光纖控制線路、資料傳輸介面等)在10月16日安裝完成。在79天之內,所有的陣列基礎設施都組裝完成,而包含整合式多通道T/R模組(Transmit Receive Integrated Multi-channel Modules,TRIMM)以及分散式接收/激勵器( Distributed Receiver/Exciter)的線上可替換單元(Line Replaceable Units,LRU)在12月16日安裝完成。在2016年1月中旬,雷松宣布完成一個全功能AN/SPY-6(V)的陣面,其上有包含37個RMA模組、總共超過5000個TRIMM單元 。在短短不到兩年的時間,AMDR就從設計、建造進入到測試階段,工程研製發展(EMD)階段在2016年初已經完成66%。 在2016年初,AMDR計畫已經完成了9個主要里程碑(milestone),包括軟硬體關鍵設計審查( hardware and software Critical - Design Reviews)、第二次研發測試事件(Development Test Event 2,DT-2)預備審查(Readiness Review)等。DT-2會在2016年進行,包括驗證硬體層級的需求規格,隨後就會轉移到位於夏威夷的太平洋飛彈測試場(Pacific Missile Range Facility)進行第三次研發測試事件(DT-3)。在2016年上旬,AMDR完成軟體開發的Builld 2階段,包含30項主要功能,在2016年7月進行測試,同時軟體的Build 3也會達到75%的進度。AMDR的EMD硬體在2016年初完成度達95%,並等待第一套動力轉換模組在2016年上旬交付。 4.測試與生產階段 在2016年7月初,雷松將第一套完整的SPY-6 AMDR雷達原型(包含一個由37個RMA組成的S波段主陣面以及一個修改自SPQ-9B的X波段雷達)交付位於夏威夷的美國海軍太平洋飛彈測試場(Pacific Missile Range Facility,PMRF),進度比原訂超前,至此EMD階段完成了80%。在接下來12個月,AMDR原型會在太平洋飛彈測試場進行各項實際情境的測試,包含探測、防空飛彈射控、防空作戰與反彈道飛彈等測試項目。在2017年夏季於夏威夷完成測試之後,AMDR就會移到維吉尼亞東岸Wallops島的美國海軍水面作戰系統中心(Surface Combat Systems Center,SCSC)進行戰鬥系統整合測試工作,地面系統測試工作會持續到2017年7月。 AN/SPY-6與柏克Flight 3驅逐艦平台的系統整合工作會在2016財年展開,而第一個AMDR功率調節模組會在2017財年安裝在位於費城的海軍地面設施進行測試。依照當時資料,第一套完整的AN/SPY-6在2016年結束前獲得先期備料合約,在2017財年達成里程碑C(Milestone C),在2019年交付並 安裝於首艘柏克Flight 3飛彈驅逐艦上,2021年展開作戰測試,2023年中期達成初始作戰能力(IOC);不過由於伯克Flight 3建造與測試進度延後,SPY-6進行系統整合與測試的時間也跟著延後,第一套在2019年底交付造船廠裝艦,預定在2023年5月隨艦進行作戰測試,2024年2月達成IOC。 在2017年4月,五角大廈項目執行單位證實,美國海軍將AMDR計畫從工程發展階段(EMD)轉入接下來的初期小批量生產( LRIP),比原訂期程提早四個月,並在5月初動用價值3.27億美元的選擇權(屬於2013年10月簽署的EMD合約)來生產三套AMDR系統(之後合約總價值可望達16億美元)。依照2017年7月美國國會的選擇與採辦告(Selected Acquisition Report sent),AMDR計畫總經費在2016年增加了2.18億美元,使計畫總經費從原本59億美元增為61美元。這2.18億美元的增幅包含1.59億的研究發展(R&D)階段成本,含之後將AMDR系統裝在美國海軍水面作戰研究中心(Naval Surface Warfare Center,NSWC)的保羅.佛斯特號(ex-USS Paul F. Foster DD-964)防衛系統測試艦(Self Defense Test Ship,SDTS)上進行測試的費用;此外,還有5900萬美元的增幅是來自於生產購置費用的估算(計算到2027年)。 在2017年7月27日,在夏威夷太平洋飛彈測試場的AMDR型首次進行探測中程彈道飛彈目標的測試,測試代號為「靈敏泰坦」(Vigilant Titan),結果相當成功;在8月15日,雷松宣布「靈敏泰坦」項目包含一個具有複雜特性的目標,而此次測試的主要目的就是挑戰AMDR雷達系統的能耐。此次測試是AMDR在2017年進行的一系列測試中的的第二次,屬於發展測試-3(Developmental Testing-3,DT-3)的其中一環;發展測試-3階段包含一系列對空中、水面與彈道飛彈目標的測試。美國海軍本來也打算在2017財年在DT-3中排入作戰評估測試(Operational Assessment ),但美國海軍作戰測試評估辦公室(Director of Operational Test and Evaluation,DOT&E)認為此時AMDR尚未與神盾作戰系統整合,無法光靠人員讓AMDR雷達像在實際情況下運作,因此本階段進行作戰評估的意義不大;因此DOT&E的代理助卿(acting deputy assistant secretary)J. Brian Hall在2017年3月提交國會的報告中建議取消這項原訂的作戰測評,等到日後與神盾系統整合之後再進行完整的DOT&E測試。 為了因應AN/SPY-6以及後續雷達的生產工作,雷松在2017年初決定在麻薩諸塞州的安多佛(Andover, Massachusetts,雷松的設計研究中心也位於此處)建造一個面積30000平方英尺、挑高60英尺的新生產設施,稱為雷達發展設施(Radar Development Facility),共耗資7200萬美元,在2018年8月啟用。這個新廠區使用高科技自動化生產程序,例如產品的搬運移動都由全自動化的機器人完成, 內有舉升能力達50噸的起重設備來迅速搬運移動雷達;此一場房還包括一間長88英尺、寬50英尺、高52英尺的電磁靜默測試室(牆壁上總共有92000個消除雜訊的角錐),是此時雷達業界最大的測試設施之一。此一設施也能夠組裝測試比SPY-6更大型的雷達,例如雷松的海基X波段反彈道飛彈探測雷達等。
各型AMDR規模與性能 依照美國海軍的規劃,AMDR陣面是由若干個雷達模組總成( Radar Module Assemblies,RMA)構成,每個RMA就是一個獨立而完整的小型雷達 ;透過不同數量的RMA組成一個較大的雷達,具備模組化以及能彈性擴充/裁減等特性。依照不同的任務以及平台需求,AMDR陣面可由不同數量的RMA組成。 由於全系統高度模組化,AMDR雷達所有組件能輕易從一艘船艦卸下,然後回收重組到齊他船艦上。 最初美國海軍估算AMDR各版本性能時,由於美國的氮化鎵(GaN)半導體器件技術尚未成熟,因此當時AMDR打算使用的T/R組件材料仍是砷化鎵(GaAs)半導體;然而隨後GaN半導體技術發展成熟並應用於雷松的AMDR,實際測試的性能遂超過了先前紙面上預測的水平。 以下就是美國海軍對於AMDR陣面構型與性能的估算,並以現有的SPY-1D(V)相位陣列雷達作為靈敏度(信噪比,單位為分貝)的基線。
SPY+0:理論上雷達增益和SPY-1D(V)相當,陣面由9個RMA構成(T/R單元數量超過1200個),陣面孔徑大小約為1.8x1.8m(SPY-1D天線孔徑為12英尺級,3.65
x 3.65m)。日後美國海軍規劃的企業監視雷達(EASR,見下文)就採用此種陣面;由於之後雷松的SPY-6/AMDR-S雷達工程原型實測性能超過最初指標(見下文),因此9個RMA版天線的靈敏度應會超過SPY-1D(V)。 SPY+25: 這個尺寸是針對現有DDG1000驅逐艦平台,在不大幅修改上層船樓的情況下可以容納的尺寸;每個陣面由69個RMA組成(T/R單元數量超過9900個),天線直徑約18英尺級( 5.49m),信噪比比SPY-1D(V)高25分貝以上(相當於靈敏度增加約316.2倍);相較於SPY-1D(V),SPY+25可以在4倍距離外探測到RCS小一半的目標。而設計DDG-1000的BIW廠則估計, 依照DDG-1000現有設計,上層結構應該有能力搭載21英尺(6.4m)級的AMDR雷達。 SPY+30:主要是為了2000年代規劃的CG(X)巡洋艦(在2009年被取消)而規劃,天線直徑為22英尺級(6.7m)。依照美國海軍的估計,如果要因應未來30~40年間可能的最高強度空中威脅(包括彈道飛彈、匿蹤目標等) 並支援KEI等級的遠程反彈道飛彈攔截器,AMDR S頻雷達的信噪比最好能比SPY-1D(V)高30分貝(1000倍)以上,但如此大型的系統只能安裝於新設計的巡洋艦或聖安東尼奧級船塢運輸艦大小的載台上。當時以DDG-1000修改為CG(X)巡洋艦的方案,使用這種22英尺級的AMDR天線,信噪比高於SPY-1D(V)30分貝(1000倍);而美國海軍手頭上的現成設計中,只有由LPD-17聖安東尼奧級船塢運輸艦才有能力搭載這種版本的AMDR。根據雷松在2015年公布的想像圖推算,SPY+30陣面由97個RMA組成(T/R單元數量超過13900個)。這個等級的AMDR雷達甚至有潛力取代美國海軍彈道飛彈觀測艦如觀察島號(USNS Observation Island T-AGM-23,2014年除役)的AN/SPQ-11 Cobra Judy飛彈追蹤雷達。
值得一提的是,在2000年代CG(X)進行時,AMDR仍打算使用砷化鎵(GaAs)半導體製作的T/R器件,因此信噪比達不到比SPY-1D(V)高30分貝的水平;然而到2013年時,美國海軍表示,氮化鎵(GaN)半導體T/R器件發展成熟並用於SPY-6之後,伯克Flight
3的14英尺級SPY-6雷達陣面信噪比性能,已達到早先計劃在CG(X)上使用的22英尺級、GaAs器件陣面的水平。 在美國海軍的評估作業中,SPY +25方案(18英尺級陣面)可獨立執行反彈道飛彈任務,是最初CG(X)防空巡防艦規劃的目標方案,但成本過高;而伯克級艦體平台容量上限的SPY+15(14英尺及陣面)若配合其他感測器平台(包括陸基、空中與衛星等)進行聯網,勉強能滿足需求。在節約成本的考量下,美國海軍在2011年取消了CG(X),以伯克級Flight 3搭載SPY+15等級的AMDR雷達來執行反彈道飛彈任務。
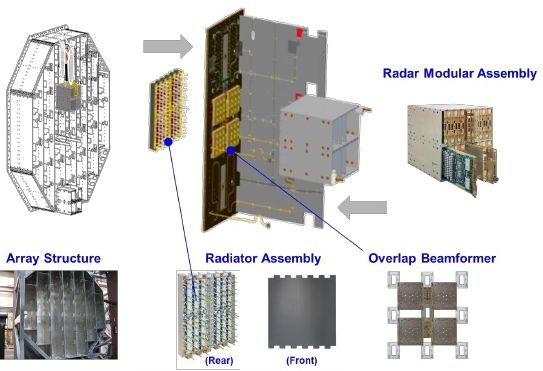
AN/SPY-6系統架構
AMDR的雷達陣列以及RMA總成。
SPY-6 AMDR工程原型天線在一個電磁波暗室裡進行測試。 AN/SPY-6的系統架構源於雷松集團在2011年9月12日發佈專利的「可擴充相位陣列雷達模組化系統結構」(Modular Architecture for Scalable Phased Array Radars);此架構將多個發射/接收(T/R)單元以及冷卻單元集成在小型機櫃構成一個子陣列單元,每個T/R單元製作成可輕易抽換的電路板,每個機櫃裡有一個數位式接收/激勵器(Digital Reciver Exciter,DREX),將子陣列接收的類比信號轉換成數位形式,然後透過光纖排線送到後端信號處理電腦。整個雷達陣面就由多個這樣的小型雷達機櫃單元組成,安裝在雷達陣面基座框架上;框架預留冷卻管路,通往每一個機櫃。此一雷達系統中,每個機櫃單元就是一個可以獨立運作的雷達單元,能依照不同需求、使用不同數量的機櫃構成雷達陣面。雷松的提案基本上就是以此架構實作,而基本的雷達機櫃單元隨後被稱為雷達模組總成( Radar Module Assemblies,RMA)。此種系統架構嚴格說來算是混合波束成形(Hybrid Beamforming),由多個T/R組件硬體構成子陣列,每個子陣列單元結合一套DREX進行數位波束成形(Digital Beamforming),但並不是每個個別T/R單元都做到數位波束成形 依照2015年3月公布的伯克Flight 3相關資訊,每組SPY-6V(V)1/AMDR-S天線陣列高14.1英尺(4.298m)、寬13.6英尺(4.145m)、深5英尺(1.524m)由37組稱為雷達模組總成(RMA)以及37個天線輻射單元(Radiator)構成;而陣面外框依舊為類似AN/SPY-1的八角形。 RMA基本上是一個可獨立控制運作的小型主動相位陣列雷達單元;每個RMA單元長寬各2英尺(60.96cm) ,由四個線上可替換單元(Line Replaceable Units,LRU)構成。每個LRU由包含多個多快速抽換的多頻道收/發模組(Transmit-Receive Integrated Multichannel Module,TRIMM)以及若干周邊組件,兩個結合數位接收/激勵器(Digital Receiver Exciter,DREX) 的雙頻道轉換器(Dual Channel Converter)、一個DREX頻率合成器(DREX Frequency Synthesizer)以及DREX輔助電力控制器(DREX Auxiliary Power Controller)等。 為了迅速帶走雷達組件產生的龐大熱量,RMA模組雷達模組具有「三明治」冷卻系統架構,每個RMA內部都有獨立的冷板 (Cold Plate),冷板內有液冷迴路通過,氮化鎵半導體(GaN)製造的T/R器件直接封裝在具備極高熱傳導率的基板上。RMA捨棄以往的氣冷,採用較為複雜的高效液冷系統 (Single-Phase Liquid Cooling),冷卻液迴路直接通過RMA後方冷板內的微通道。液冷系統能精確控制每個模組的溫度波動在攝氏1度以內,以維持雷達波束相位精確度。RMA設計成能在不關閉液冷回路的情況下,直接更換天線陣列上的TRIMM,六分鐘內能完成LRU的抽換 ,拆換工作只需要兩種簡單的人工工具。 依照而日後雷松公布的資料顯示,每個RMA總共有24個TRIMM(意味每組LRU各有6個RMA),每個TRIMM單元包含6個T/R單元,因此每個RMA總共有144個T/R單元,而由37組RMA構成的SPY-6(V)1陣面總共有5328個T/R單元(以往AN/SPY-1D雷達陣面的單元數為4350個)。RMA使用的數位激勵器(DREX)是來自美國海軍研究辦公室(ONR)發展的第四代DREX技術。 AMDR-S雷達輻射組件與外罩(radiator/radome)採用模組化設計,只需要使用簡單的工具,就能在海上值勤期間拆換。雷松宣稱,9個RMA構成的陣面(即SPY+0)就已經可以執行反彈道飛彈任務,37個RMA的陣面(即AN/SPY-6的規模)能在原有神盾系統SPY-1D(V)雷達兩倍的距離探測到雷達截面積一半的目標(即靈敏度提高30倍);而69個RMA的陣面則可在原有神盾系統SPY-1D(V)雷達四倍的距離探測到雷達截面積一半的目標(即靈敏度提高300倍)。
在狀況一(State 1)的戰備情況之下,AMDR的主電源功率消耗上限的目標值是1100KW,門檻值為1235KW;在戰備更低的狀況二(State 2)之下,AMDR的功率消耗上限目標值降至850KW,門檻值為950KW。 在AN/SPY-6 AESA陣列中,每個RMA模組都是一個獨立操作的數位雷達節點。如果其中一個RMA 因為戰損或硬體故障失效,系統會透過多種軟體機制進行修復,維持全空域監視而不會產生盲區,這包括: 1.波束權重重新計算(Adaptive Beamforming): 後端處理器會即時偵測到某個節點失聯,系統進而重新計算整個雷達陣列的相位與振幅分布(此種能力構築於神盾ACB 16/TI-16的硬體架構中)。 2.功率補償(Power Graceful Degradation): 為了彌補失效RMA模組造成整體波束旁波瓣(Sidelobe)升高或增益損失,系統會指令鄰近的RMA 微幅提高發射功率,並調整它們的相位延遲,重新進行波束塑型(Beam Shaping),類似最小均方誤差(LMS)補償,確保波束指向精度依然能滿足標準SM-2/6防空飛彈的導引需求。 即便整個陣面損失了10-20%的RMA,軟體仍能維持一個完整的「邏輯孔徑」,操作人員在螢幕上幾乎感覺不到性能下降,只有維修診斷系統會跳出提示,要求返航後更換該模組。此即為優雅降級(Elegant degradation)。 SPY-6/AMDR -S每面天線的直徑比AN/SPY-1D(V)略高,但重量與深度比AN/SPY-1D(V)增加不少;透過縮小分段模組、提高結構強度 (包括增加低截面強化樑)等方式,伯克Flight 3的上層結構在沒有重大修改的情況下就可以安裝。SPY-6/後端系統的冷卻系統稱為冷卻裝備單元(Cooling Equipment Unit,CEUs)。由於AMDR的T/R收發單元都集中在天線上,因此需要更強的天線冷卻能力,為此柏克Flight 3還將原本為SPY-1D相位陣列雷達供應風冷的風扇室擴大。 AN/SPY-6的引進讓神盾系統需要處理的數據量激增。在先前AN/SPY-1雷達的時代,所有雷達波束合成與信號處理都在專屬的計算機上完成(AN/UYK-7或AN/UYK-43中央電腦,或者後來加入反彈道飛彈任務之後新增的商規處理器),輸出到戰系的都是全部處理完成的目標軌跡。而AN/SPY-6是數位化波束成形(DBF)的雷達,在前端就完成類比-數位轉換 (ADC)全面轉為數位信號,輸出到機房戰系伺服器的是數位化的原始資料流,數據量是先前AN/SPY-1的30倍以上。這樣的策略是讓戰系的計算機資源池都可以支持SPY-6數位雷達的波束合成與信號處理(而不再只是專屬於雷達的處理器),以滿足未來更複雜的戰場應用場景,例如更靈活、更彈性的雷達波束管理來同時執行多項複雜任務,或者是追蹤可變軌跡的彈道飛彈重返載具或鄰近大氣層高超音速武器、處理大量低跡訊的低成本無人機群集、處理進階電子反制/反反制應用以及嚴重背景干擾搜尋目標信號、新的多雷達協同模式...等等。 AN/SPY-6以分散式訊號處理 (Distributed Beamforming)來處理龐大的雷達信號,處理工作區分在靠近雷達射頻組件的前端以及後端。配合AN/SPY-6的技術插入16(Technology Insertion,TI-16)硬體架構(在神盾Basline 9C2首度引進)中,AN/SPY-6的雷達前置處理分散化,天線接收的雷達信號經ADC轉換成數位信號後,基礎的信號過濾、都普勒計算也都在靠近雷達天線端的FPGA 或小型刀鋒伺服器上處理完成,即邊緣運算(Edge computing)。 而為了支持AN/SPY-6雷達前端傳入機房伺服器的龐大資料流,TI-16升級資料匯流排(基於40Gbps/100Gbps的光纖網路)來因應龐大的數據傳輸量,並廣泛應用遠端直接記憶體存取(Remote Direct Memory Access,RDMA)提高CPU使用率與吞吐量。RDMS是其中關鍵,這是能讓遠端一台電腦記憶體能繞過作業系統核心以及其上的網路傳輸協議,直接存取另一台電腦記憶體資料的網路技術;這允許SPY-6雷達前端回傳的龐大數據流進入戰系的伺服器時, 不需要由中央處理器(CPU)搬運,而是直接寫入伺服器的記憶體。這能大幅降低通訊延遲,對於攔截高超音速目標所需的微秒級反應極其重要,也避免伺服器CPU被處理搬運海量數據的工作佔滿(甚至當機)。 供電需求 供柏克Flight 3使用的AN/SPY-6(V)1 S波段雷達,總功率可能約10MW之譜(也有估計是6MW以上),大致是原本AN/SPY-1D相位陣列雷達的兩倍;以其天線T/R組件效率約30%、佔空比20%計算,四個陣面的總合平均功率約600KW(單一天線150KW);而AN/SPY-1D(V)的 功率放大器效率(CFA efficiency)約10%、佔空比約13.3%,四面天線總和的平均功率約77~111KW,足見SPY-6由於使用主動相控陣技術以及新型高性能GaN組件的高功率與高效率,性能有 了驚人的成長。相較於SPY-1D(V),柏克Flight 3使用的SPY-6/雷達可望在兩倍的距離上偵測到一半大小的目標,同時追蹤的目標軌跡數量增加六倍,同時支援資料更新的防空飛彈(飛行中)數量增加三倍。然而, 作為彈道飛彈防禦功能時,相較於美國海軍原本希望獲得的20+英尺版本AMDR雷達(SPY+25與SPY+30),柏克Flight 3的14英尺級AMDR由於使用距離較低,因此只能冒險更貼近敵國海岸來搜索可能升空的彈道飛彈,也因此更容易遭到敵方反擊。
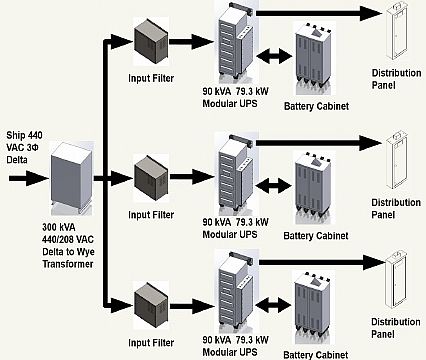
AMDR的後端機櫃供電系統,分為三套,每套有一個UPS不斷電系統來連接 AMDR後端設備(包含冷卻),並且連接電池以防船艦供電突然中斷。 電力供應方面,以2015年3月美國海軍提交國會的柏克Flight 3技術報告為例,柏克Flight 3的AMDR雷達系統使用的電力是透過艦上的1.4MW電力轉換模組(Power Conversion Modules,PCM) ,將4160V交流電轉為1000V直流電輸入AMDR的雷達陣面。AMDR的後端機櫃系統則使用208V交流電,艦上的450V交流電(由原始的4160V降壓而來)通過單一的440/280VAC變壓器(300kVA)降壓成208V交流電,然後分流進入三套AMDR後端供電系統;每套供電系統首先是一個整流器,然後通過一個90kVA/79.3kW的不斷電系統(UPS)機櫃,再連接一個配電盤,提供AMDR後端各機櫃運作、控制以及冷卻所需的電力;每個UPS還並聯一個備用電池機櫃,萬一船艦供電中斷就可立刻接上,使AMDR後端系統不至於立刻停擺,避免資料流失。 為了節約電力消耗,AMDR-S雷達在平時以省電狀態(reduced power states)運作,操作模式由戰鬥管理系統控制。 量產型問世 依照美國海軍最初規劃,供柏克Flight 3使用、37個RMA的版本AN/SPY-6(SPY+15版本)的信噪比(SNR)比SPY-1D(V)提高15 dB,意味靈敏度提高30倍,此外同時追蹤的目標數量是後者6倍,而能同時提供射控支持(上/下鏈傳輸)、飛行中的防空飛彈數量是後者的3倍;而相較於SPY-1D(V),AMDR能在兩倍的距離外探測到尺寸一半的物體。 2016年7月雷松將第一部AMDR完整雷達工程原型(即SPY-1D +15版本,陣面由37個RMA組成)陸續在夏威夷太平洋飛彈測試場(Pacific Missile Range Facility,PMRF)、維吉尼亞州東岸Wallops島的美國海軍水面作戰系統中心(Surface Combat Systems Center,SCSC)進行測試,實測結果顯示這個AMDR雷達原型的性能表現大大超出原先估計。 在2016年5月海上-空中-太空展(Sea Air Space 2016)上,雷松公司宣稱,SPY-6的第一套全功能陣面在實際測試中,信噪比的表現比SPY-1D(V)提高了17dB,意味靈敏度提高50倍,比最初預估 (比SPY-1D(V)提高15dB)還要高一截 ;而在美國政府審計組織(GAO)的相關報告則記載比SPY-1D(V)信噪比增加15dB並有2dB冗餘。之後 在2018年8月7日,雷松高層在邀請媒體參觀位於麻薩諸塞州新啟用的SPY-6(V)1生產線時透露,SPY-6測試展現的信噪比比SPY-1D(V)高18.4 dB,意味靈敏度是提高70倍。在2019年5月初,雷松集團的艦載雷達系統主管Scott Spence宣布,SPY-6(V)1的 在太平洋飛彈測試場進行發展測試(DT)中,信噪比較SPY-1D(V)提高20dB,意味靈敏度提高100倍(理論探測距離是SPY-1D(V)的3.16倍),比起最初規劃的SPY+15靈敏度提高3倍 ,而美國海軍也批准雷松在公開場合使用這個數據。這顯示由RMA組件構成的SPY-6系列性能超標,因此先前估計規劃的各種版本的實際性能應該都會超出原訂指標。 在2019年5月6日舉行華盛頓的海上/空中/太空展(Sea Air Space 2019)中,雷松集團的艦載雷達系統主管Scott Spence透露,第一套AN/SPY-6(V)1的下甲板設備在本周運往Ingalls造船廠,準備安裝到建造中的首艘柏克Flight 3飛彈驅逐艦傑克.盧卡斯號(USS Jack H. Lucas DDG-125)。 在2020年6月2日,雷松飛彈與防衛(Raytheon Missiles & Defense)宣布,第一套量產型的AN/SPY-6(V)1相位陣列雷達陣面完成了複雜近場測試(comprehensive near-field range testing)程序;隨後在7月21日,雷松宣布這套雷達已經交付美國海軍,用來裝備首艘柏克Flight 3飛彈驅逐艦傑克.盧卡斯號(USS Jack H. Lucas, DDG-125)。在從雷達發展設施出廠之前,每個AN/SPY-6(V)1雷達陣面都要完成以下程序: .陣面上超過5000個T/R單元都要正常工作 2.校準(Alignment and calibration)陣面上將近150個子陣列以及5000個T/R組件。 3.蒐集與驗證超過42000個「golden database」樣本參數,作為每個陣面裝艦服役後在海上進行自動校準程序的基準。 4.蒐集、分析、驗證超過300個陣列發射/接收波束的波形。
在2020年10月7日,第一套AN/SPY-6(V)1主動相位陣列雷達交付摩爾斯頓的 在2020年7月21日,雷松生產的第一套AN/SPY-6(V)1主動相位陣列雷達交付美國海軍,用於在密西西比州帕司卡古拉的英格斯造船廠(Ingalls)建造的第一艘柏克Flight 3飛彈驅逐艦──傑克.盧卡斯號(USS Jack H. Lucas, DDG-125)。接著在2020年10月7日,一套AN/SPY-6(V)1主交付位於新澤西州摩爾斯頓(Moorestown, N.J.)的戰鬥系統工程發展展處(Combat Systems Engineering Development Site,CSEDS),安裝在綽號「玉米田巡洋艦」(cruiser in a cornfield)的神盾系統模擬設施中。在2021年12月20日,雷松飛彈防禦公司(Raytheon Missiles & Defense)宣佈,安裝在柏克Flight 3驅逐艦首艦傑克.盧卡斯號的AN/SPY-6(V)1 AMDR雷達系統完成首次啟動(light off),這是展開後續艦載測試以及人員訓練的重要里程碑。 依照2024年1月12日防務新聞(Defense News)報導,美國海軍整合作戰系統項目執行辦公室(Program Executive Officer for Integrated Warfare Systems,PEO IWS)主管Seiko Okano少將在2023年12月透露,AN/SPY-6雷達在一連串測試事件中表現符合預期、非常良好。這些測試是在柏克級Flight 3首艦傑克.盧卡斯號(USS Jack H. Lucas, DDG-125)上進行,包括2023年9月的首次海上實彈測試(以SPY-6探測到目標、發射一枚標準SM-2擊落靶機),以12月的空襲事件測試。Seiko Okano少將透露,此時SPY-6雷達進行了約30多天海上測試,包括在海上環境(包含雜波、大氣影響等)調整雷達。雷松的海軍雷達項目資深主管Mike Mills表示,傑克.盧卡斯號下週(2024年1月中旬)會航行到夏威夷,繼續進行各項雷達與戰系測試,目標在2024年8月達成初始作戰能力(IOC)。Mike Mills表示,傑克.盧卡斯號AN/SPY-6(V)1雷達的所有測試經驗,都會用來調整與改善各種其他版本的SPY-6雷達系統;因此等接下來配備AN/SPY-6(V)3雷達系統的福特級航空母艦甘迺迪號(USS John F. Kennedy CVN-79)開始試航時,艦上雷達需要的調整應該會比傑克.盧卡斯號更少。美國海軍SPY-6雷達項目主管傑斯.明克上校(Capt. Jesse Mink)在另一場演講中透露,美國海軍會持續在海上測試每一種版本的SPY-6雷達,每次測試事件無論是哪一種船艦、哪一種版本,軟體修改與參數調整都會運用在全部版本的SPY-6雷達上,因此後續版本就不必每次都重頭調整測試。
EASR企業對空監視雷達(AN/SPY-6(V)2/3)
由雷松研製的EASR固態電子掃描雷達,其陣面使用與AMDR相同的RMA模 組構成,數量只有9個,是一個SPY-6陣面的1/4。 由於無論是AMDR或先前的DBR雷達,對於航空母艦、兩棲艦艇(只需要配置短程防空自衛系統)都過於昂貴 ;而洛馬集團開發的AN/SPY-4 S波段VSR雷達也面臨落後超支,因此美國海軍隨後又決定發展企業對空監視雷達(Enterprise Air Surveillance Radar,EASR)來取代VSR,成為美國海軍現役的AN/SPS-48、49等舊型對空搜索雷達的接替者。EASR將是一種新型固態電子掃描雷達 (AESA),兼具對空監視、防空作戰、航空管制、對水面搜索等能力,價格比AMDR低廉,性能、功能也較為簡化。 在2013與2014年6月,美國海軍研究辦公室(Office of Naval Research,ONR) 分別與諾格集團和雷松簽署EASR的先期研究與概念展示合約,雙方的合約價值都是600萬美元的合約。在先期概念研究與展示完成後,美國海軍綜合武器系統項目辦公室(PEO IWS)會進行公開競爭程序,從兩家競爭團對中選擇其一。在EARS的先期概念研究階段中,諾格集團延續在AMDR時期的提案,用先前該公司為海軍陸戰隊發展的TPS-80G/ATOR陸基多功能AESA雷達為基礎;而雷松方面則以先前AMDR所發展的雷達模組總成( Radar Module Assemblies,RMA)架構來設計,盡量使用AMDR已經研發的成果來降低成本。 原本美國海軍希望在2027財年交付的第三艘福特級航空母艦企業號(USS Enterprise CVN-80)以及LHA-8兩棲突擊艦可以開始採用EASR;而為了節約海軍開支,美國海軍 海上系統司令部負責航母計畫的執行官湯姆.摩爾少將(Tom Moore)在2015年3月17日宣布,提前在福特級航空母艦的二號艦甘迺迪號(USS John F. Kennedy CVN-79)上以EASR取代原本首艦福特號的DBR雷達,估計可以節省1.2億美元。如果甘迺迪號在2022年建成時就交付,此時EASR將趕不及裝艦,屆時可能採用分階段交付的方式,日後再補裝EASR雷達。 在2015年8月,美國海軍海上系統司令部(Naval Sea System Command,NAVSEA)發佈EASR的工程發展階段的需求徵詢(Request for Proposal,RFP);然而先前參與先期概念研究展示階段的兩家廠商中,只有雷松團隊回覆了需求徵詢並提交本身的提案,諾格團隊則放棄參與。在2016年8月19日,NAVSEA與雷松整合防衛系統(Raytheon Integrated Defense System)簽署EASR雷達的工程發展階段的合約,價值9206萬美元,研發、設計、製造一座EASR雷達的工程發展模型(Engineering Development Model,EDM)並進行整合測試工作,合約執行期間42個月,預計在2020年2月完;在2019年初,雷松將EDM雷達原型交付在維吉尼亞州的Wallops島的美國海軍水面作戰系統中心(U.S. Navy's Surface Combat System Center),在2019年3到6月進行發展測試(DT)。工程發展階段完成後,此一合約還包括後續生產EASR雷達的選擇權,如果獲得執行,則合約總值會增加到7.23億美元。此一合約簽署後,美國2016財年國防預算中就編列首筆1100萬美元的EASR雷達的研究、發展、測試、評估項目經費。 成為EASR雷達的主承包商之後,雷松集團堪稱囊括美國海軍接下來所有艦載固態主動相位陣列雷達系統,包括X波段的SPY-3 MFR雷達、SPY-6 AMDR以及EASR。 EASR的EDM原型採用單面旋轉天線,在測試固定式天線的版本時則停止轉動。依照此時的規劃,EASR會發展兩種版本:版本1(Version 1,就是EDM階段發展的型式)採用單面旋轉天線 (之後正式型號為AN/SPY-6(V)2), 首先用於第二批美利堅級(LHA-8起)兩棲突擊艦、LH(R)船塢登陸艦等兩棲作戰艦艇,取代過去的AN/SPS-48E;而版本2(Version 2)則由三面固定式相位陣列天線組合,首先裝備於甘迺迪號(CVN-79)開始的第二艘福特級(Ford class)航空母艦上。 在2016年11月初,美國海軍與雷松簽署價值9200萬美元的研製合約。在2020至2026年,雷松將供應16套EASR雷達系統(包含旋轉、三面固定天線構型)給後續的福特級航空母艦(CVN-79、80)以及新造大型兩棲作戰艦艇(包含替換惠德比島級/哈潑渡口級船塢登陸艦的LX(R)以及LHA-8起的美利堅級Flight 1兩棲攻擊艦)計畫。此種EASR雷達的天線陣面由9個與AMDR相同、長寬各2英尺的RMA組件構成,約是一個SPY-6陣面的四分之一,理論上此天線的靈敏度表現已經與一個AN/SPY-1D(V)相位陣列雷達天線相同。此外,美國海軍在2017年展開競標的FFG(X)飛彈巡防艦(接替LCS的計畫,打算建造20艘),也會採用固定式EASR相位陣列雷達,每個陣面同樣由9個RMA組件構成。 依照原計畫,第一套採用三面固定陣列天線的EASR在2022年交付美國海軍並裝上福特級航空母艦的二號艦甘迺迪號(USS John F. Kennedy CVN-79),而第一套旋轉天線構型EASR則在2024年交付布干維爾號兩棲突擊艦(USS Bougainville LHA-8);不過實際上,第一艘裝備AN/SPY-6(V)2的是聖安東尼奧級船塢運輸艦李查.小麥可庫爾號(USS Richard M. McCool Jr. LPD-29),該艦在2024年4月11日交付。 依照2018年的信息,美國海軍正式確定EASR旋轉版本的型號為AN/SPY-6(V)2。而在2019年在華盛頓舉辦的海上、空中、太空展(Sea Air Space,SAS2019)中,雷松宣布EASR採用三個固定陣面的版本型號為AN/SPY-6(V)3。
在雷松公司電磁吸波室進行測試的第一套EASR企業監視雷達的原型。 陣面由9個RMA模組構成。 在2019年3月,雷松的第一套EASR企業對空監視雷達原型(單陣面的SPY-6(V)2構型)完成了自身的次系统測試,並從雷松公司位於麻薩諸塞州薩德伯里市(Sudbury, Massachusetts)的近場測試場(Near Field Range)裝運到美國海軍位於維吉尼亞州瓦勒普斯島(Wallops Island, VA.)的水面作戰系統中心(Surface Combat System Center)測試場,進行完整的全系統測試。
在維吉尼亞州瓦勒普斯島水面作戰系統中心測試的EASR雷達原型。 在2019年8月20日,雷松與美國海軍宣布,第一套EASR企業對空監視雷達(SPY-6(V)2構型)在維吉尼亞州瓦勒普斯島的美國海軍水面作戰系統中心完成系統等級(system-level)測試;第一項測試程序包括搜索、探測、識別、追蹤大量目標,例如附近飛行的民航機。在第二項測試中,EASR持續追蹤多個目標長達數小時,此項測試牽涉到與另外一個系統的整合工作。EASR的系統性測試在2019年第四季完成,隨後就由工程與成熟度發展階段(engineering and manufacturing development phase)轉移到生產階段。
在2023年2月11日,第一套AN/SPY-6(V)2安裝在建造中的聖安東尼奧級船塢 運輸艦里查.麥庫爾號(LPD-29) 上。
里查.麥庫爾號(LPD-29) 上的SPY-6(V)2相位陣列雷達 第一套量產型AN/SPY-6(V)2安裝在第13艘(最後一艘)聖安東尼奧級船塢運輸艦李查.麥庫爾號(USS Richard M. McCool Jr. LPD-29) 上。
美國海軍自衛武器測試艦(Self Defense Test Ship)前保羅.佛斯特號 (ex-USS Paul F. Foster DD-964)後桅杆正在安裝AN/SPY-6(V)2相位陣列雷達。 照片出現於2025年12月。
現役神盾艦換裝AMDR(AN/SPY-9(V)4) 在2018年9月17日,美國海軍部長和海上系統司令部(NAVSEA)向業界發佈2021至2015財年SPY-6/EASR雷達硬體生產工作的信息徵詢書(RFI),其中記載的雷達型號包括柏克Flight 3的AN/SPY-6(V)1、裝在兩棲艦上的旋轉式EASR(型號為SPY-6(V)2)、裝在新造福特級航空母艦(CVN-79甘迺迪號起)上的三面固定陣面EASR( 當時型號未定,後確定為AN/SPY-6(V)3),以及用來為現役伯克級換裝的AMDR(AMDR Backfit)。這份信息不只首度確定旋轉型EASR的型號為SPY-6(V)2,而且首度具體提到為現役伯克級換裝AMDR雷達的計畫,使用的構型是SPY+11(即信噪比比SPY-1D(V)提高11分貝,相當於靈敏度比提高12.59倍),每個陣面由24個RMA模組構成,天線孔徑維持與現有SPY-1相同(約12英尺)。依照這份計畫,第一套用來改裝現役伯克級的AMDR Backfit打算在2021財年交付,2024財年完成裝艦。在2019年在華盛頓舉辦的海上、空中、太空展(Sea Air Space,SAS2019)中,雷松宣布此種24個RMA版本的型號為AN/SPY-6(V)4。 在2011年左右,雷松就表示AMDR可以用於換裝現有神盾艦艇的SPY-1相位陣列雷達,而洛馬以SSR固態雷達為基礎的提案雖然在AMDR競爭中不敵雷松,但仍繼續發展SSR並瞄準現役神盾艦更換相位陣列雷達的市場。不過,隨著美國海軍正式將AMDR Backfit排入時程,意味洛馬向美國海軍推銷SSR雷達、替換現役SPY-1的計畫可能落空。 在2019年,美國海軍整合武器系統項目辦公室(PEO IWS)已經責成雷松,對於將SPY-6相位陣列雷達衍生型安裝在現有較舊版本柏克級飛彈驅逐艦上進行技術研究,做為這些驅逐艦壽命中期翻修提升工程的項目。在2020年1月15日,雷松的SPY-6雷達項目主管Mike Mills向美國海軍新聞社(USNI)表示,美國海軍要求雷松提供各種不同的升級概念,最重要的是如何盡可能沿用現有的部件,降低升級作業所需的成本。 在2020財年美國海軍預算中,打算在2020財年購買24套SPY-6相位陣列雷達,從2022財年開始購買供現役柏克級升級的SPY-6雷達(單一陣面24個RMA)以及相關的電子、冷卻設備,首艘換裝的柏克Flight 2A從2025財年展開升級工程。雷松表示,換裝SPY-6不僅可大幅增加現役柏克級驅逐艦的戰力,而且遠比現有SPY-1D易於維護。 雷松在2020年初開始研發這種24個RMA版的SPY-6,原訂可在2023年開始交付。美國海軍在2018年打算推動的現役柏克級延役計畫(從原訂35年增加到40年),到2020年時宣布取消; 幾經波折後,終於在2023財年正式啟動驅逐艦現代化2.0(DDG Mod 2.0)計畫(見下文),為20艘現役柏克級換裝AN/SPY-6(V)4雷達以及SEWIP Block 3電子戰系統等。 2021年12月28日防務新聞(Defense News)的報導中,雷松飛彈與防禦(Raytheon Missiles and Defense)的海軍雷達項目主管Scott Spence表示,目前的生產計畫是在接下來5年生產至多59套各型SPY-6雷達系列((V)1~4)來裝備美國海軍船艦,平均每年12套(實際情況取決於美國海軍建造新艦以及升級現役柏克級驅逐艦的規劃)。在2021年,雷松進行了SPY-6(V)2與(V)3的關鍵測試工作,準備在2022年開始裝艦以及整合。 在2022年1月11日,Breaking Defense報導稱,雷松主管海軍雷達項目的Scott Spence透露,雷松正與美國海軍合作,準備升級現役伯克Flight 2A飛彈驅逐艦的雷達系統(此時美國海軍有四十多艘現役),以每個陣面24個RMA的AN/SPY-6(V)4取代原本的AN/SPY-1D相位陣列雷達,為此後端神盾作戰系統也會升級到Baseline 10系列版本。Scott Spence稱,雷松在2021年12月獲得價值2.37億美元的合約,進行系統整合與生產支持等工作;如把相關硬體交付船廠等浮塢、把戰鬥系統整合到船艦上、持續研發改進雷達系統等。Scott Spence表示,新造伯克Flight 3擁有的能力,包括整合防空與反飛彈防衛作戰(IAMD),同時追蹤來襲外大氣層彈道飛彈以及一般的戰鬥機、巡航飛彈等,現役伯克Flight 2A經過升級後也都會擁有。 日本廠商加入SPY-6供應鏈 在2023年11月7日,日經新聞網報導,雷松與日本三菱電子(Mitsubishi Electric,MELCO)敲定協議,三菱電子加入AN/SPY-6的供應鏈,為此雷達提供電源供應裝備及相關組件。在2024年7月24日,三菱電子宣布獲得雷松合約,開始生產AN/SPY-6雷達所需的關鍵組件;而合約中的相關企業還包括日本三波工業(Sampa Kogyo,主要業務是為設計製造和維護船舶、潛艦、航空機的電子設備),代表三菱電子等日本廠商正式打入美國海軍高端裝備的市場。 這也意味著之後AN/SPY-6外銷時,也會由日本供應的關鍵組件;2025年11月18日,雷松海軍系統與維持(Naval System & Sustainment)部門副總裁Jennifer Gauthier向Naval News透露,出口給德國F-127巡防艦的SPY-6雷達同樣會使用日本生產的關鍵組件。 AN/SPY-6各型號
依照2019年在華府舉辦的海上、空中、太空展(Sea Air
Space,SAS2019),AN/SPY-6分為四種次型: 依照日後估計資料,AN/SPY-6(V)1整套硬體(含四個天線陣面)重12萬磅(約54.4公噸),供電需求估計大於6MW,操作溫度攝氏-40度至+55度。SPY-6(V)1對空探測距離超過300海里(555km),追蹤距離250至300海里(462~555km),能同時追蹤超過600個目標,天線俯仰涵蓋範圍0~90度角。SPY-6資料刷新數率是在秒級以內(sub-second),具備先進數位濾除雜波與人工智能(AI)協助的電子反反制(ECCM),能與神盾作戰系統、協同作戰能力(CEC)、Link16資料鏈、Mod5/S敵我識別(IFF)等協同工作。 依照2022年1月12日美國海軍首次公布的DDG(X)飛彈驅逐艦(用來接替提康德羅加級飛彈巡洋艦),服役之後先配備與伯克Flight 3相同的雷達組合,包括四座14英尺級AN/SPY-6(V)1 S波段相位陣列雷達以及AN/SPQ-9B X波段搜索雷達;日後打算升級為四座陣面18英尺級(5.49m)的SPY-6版本,每個陣面由57個RMA構成(早先美國海軍規劃的18英尺級AMDR打算使用69個RMA,可能由於實際上AN/SPY-6測試結果顯示RMA性能超乎預期,可以適度縮減數量);而AN/SPQ-9也打算由未來X波段雷達(FXR,不包含射控照明)取代。 依照2023年1月的消息,美國海軍規劃為約20艘柏克級進行大規模升級,項目稱為「驅逐艦現代化2.0」(DDG Mod 2.0),包括換裝SEWIP Block 3電子戰系統、AN/SPY-6(V)4雷達與神盾Baseline 10作戰系統,整個項目總成本粗估170億美元。在2023年1月,雷松的SPY-6雷達項目主管Mike Mills向美國海軍研究所(USNI)新聞表示,現役柏克級換裝AN/SPY-6(V)4雷達會將原本AN/SPY-1(D)V雷達的所有設備完全移除,然後在原本SPY-1D的空間上安裝SPY-6(V)4,改裝作業完全不會影響上層結構外型。 在2025年8月26日,RTX宣佈雷松與美國海軍成功完成AN/SPY-6(V)4雷達的海上環境測試。 與先前SPY-6系列測試相同,這具AN/SPY-6(V)4安裝在夏威夷太平洋飛彈試射場(Pacific Missile Range Facility)的先進雷達探測實驗室(Advanced Radar Detection Laborator)設施上。 在這項測試中,AN/SPY-6(V)4在多種情況下追蹤了空中與水面目標,展示了雷達系統的 在不同任務情境下的先進追蹤能力,並為多年來的建模與模擬測試工作完成了確認。 SPY-6生產工作 在2020年7月17日,雷松飛彈與防衛(Raytheon Missiles and Defense, Marlborough, Massachusetts)獲得價值1億2588萬1928美元的固定價款加激勵修改合約,執行EASR雷達的低量初期生產(Low Rate Initial Production,LRIP),合約選項包括產製六套EASR雷達系統,其中四套是單面旋轉天線的AN/SPY-6(V)2,兩套是固定式三天線的AN/SPY-6(V)3。其中,四套AN/SPY-6(V)2分別用來裝備新造的美利堅級兩棲攻擊艦布干維爾號(USS Bougainville LHA-8)、聖安東尼奧級船塢運輸艦李查.小麥可庫爾號(USS Richard M. McCool Jr. LPD-29)和哈里斯堡號(USS Harrisburg LPD-30,首艘LPD17 Flight II型),以及為尼米茲級核子動力航空母艦史坦尼茲號(USS John C. Stennis CVN-74)換裝(配合該艦進行RCOH重裝填核燃料大修工程時加裝)。而兩套AN/SPY-6(V)3則用於第二艘福特級航空母艦小約翰.甘迺迪號(USS John F. Kennedy,CVN-79),以及首艘新一代飛彈巡防艦布魯克號(USS Brooke FFG-1)。 在2022年3月31日,雷松宣布獲得美國海軍價值6.51億美元合約以及附帶的選擇權(如全部執行則可達25億美元),執行AN/SPY-6(V)系列相位陣列雷達(包含固定陣面以及旋轉陣面版本)的全速率量產(full-rate production)工作,合約涵蓋硬體生產與維護等。此前,美國海軍已經投資超過6億美元用於研究發展與製造SPY-6雷達系列。此次合約含選擇權如果合約全部執行,雷松為美國海軍交付的AN/SPY-6雷達總數會來到46套,在接下來五年裝備31艘船艦,合約累計總值31.6億美元。 依照2024年1月12日防務新聞(Defense News)報導,雷松的海軍雷達項目資深主管Mike Mills表示透露,雷松在2022與2023年獲得美國海軍的SPY-6硬體生產以及維護合約,實質上已經進入全速率量產階段(full-rate production);不過,名義上要等到首艘柏克Flight 3驅逐艦傑克.盧卡斯號(DDG-125)的AN/SPY-6(V)1達成IOC(預定在2024年8月)之後,才算正式進入全速量產階段。Mike Mills預期,在2025年3月AN/SPY-6簽署目前合約的最後一次選擇權之後,在2026年初就會簽署正式的全速率量產合約來進行後續生產。 在2024年6月10日,RTX宣佈獲得美國海軍價值6.77億美元的合約增修,持續生產AN/SPY-6系列雷達;這是美國海軍在2022年3月31日與雷松簽署AN/SPY-6雷達硬體產製合約之後,第三次行使選擇權,至此合約總值在5年內已經達到30億美元以上;而此次6.77億美元增修是生產7套雷達,使美國海軍訂購數量累積至38套。 全速量產階段(2026財年起) 雷松獲得的SPY-6首批生產合約從2016財年開始,到2025財年完成所有的選擇權;2026財年正式進入全速率量產合約(full-rate production)開始,就會有新的合約。依照2024年初美國海軍的採辦資料,從2016到2025財年,美國海軍總共向雷松採辦了18套AN/SPY-6(V)1(用於新造柏克Flight 3)、10套AN/SPY-6(V)2 EASR(用於航空母艦、兩棲艦)、8套AN/SPY-6(V)3 EASR(用於星座級巡防艦、福特級航空母艦後續艦等)以及4套AN/SPY-6(V)4(用於柏克Flight 2A升級),總計40套。
在2024年1月5日,美國海軍海上系統司令部(NAVSEA)發佈一份關於AN/SPY-6(V)雷達量產作業的信息徵詢/商源尋求(RFI/Sources
Sought)文件,效期到2024年9月30日。此案的主要執行機關是NAVSEA的水面上感測器與雷射項目執行辦公室(Program Executive
Office Integrated Warfare Systems Above Water Sensors and Lasers,PEO IWS
2.0),目的是進行AN/SPY-6(V)全系列雷達的組件生產工作的市場研究。依照RFI文件,PEO IWS
2.0辦公室有意在2026財年起的正式採取新的競爭合約架構,以按圖生產(Build-to-Print,BTR)的模式生產SPY-6(V)系列雷達的LRU硬體;而軟體發展、系統整合與測試、軟體維護等工作等則不在此RFI範圍之內。 此外,這份RFI也提到,考慮到未來通過海外軍售管道(FMS)外銷的可能性,AN/SPY-6(V)的產製量有可能再增加,以因應海外客戶的需求;估計在2026至2030財年期間內,再增加的產製需求包括至多3套AN/SPY-6(V)1(總數不太可能超過9套)、至多3套AN/SPY-6(V)4(總數不太可能超過6套)以及至多2套AN/SPY-6(V)3(總數不太可能超過5套)。 依照2025年1月中旬美國海軍水面艦協會年會(SNA 2025)透露的消息,首艘換裝AN/SPY-6(V)2雷達的尼米茲級航空母艦約翰.史坦尼斯號(USS John C. Stennis)。約翰.史坦尼斯號從2021年5月7日進入新港紐斯船廠展開重裝填燃料複雜翻修(Refueling Complex Overhaul,RCOH)工程,而AN/SPY-6(V)2會在2026年改裝工程最後階段裝艦。尼米茲級會陸續配合RCOH工程,加裝AN/SPY-6(V)2雷達來取代原本的AN/SPS-48與AN/SPS-49對空搜索雷達。 在2025年5月30日,美國國防部與RTX旗下雷松飛彈與防衛(Raytheon Missiles and Defense)簽署價值5億3675萬美元的合約增修, 這是在2024年6月10日簽署的合約(當時價值6億7700萬美元)之後的增修, 持續AN/SPY-6(V)整合與生產支持(Integration and Production Support)。此次合約增修涵蓋美國海軍與德國海軍的工作, 其中美國海軍佔71.4%,德國海軍佔28.6%。此合約包括附帶選項,如果全部執行,總值最多可達28.9億美元,從2026年5月執行到2030年5月。 這是SPY-6第一個涵蓋國外客戶需求的合約。 外銷 由於AN/SPY-6(V)是為美國海軍需求而開發,其技術與知識產權都屬於美國海軍,因此管制自然比較嚴格;依照2019年左右台灣方面的消息,台灣海軍曾向美國海軍探詢購買SPY-6雷達的可能性,美方回覆此時SPY-6仍管制出口(當時美國海軍本身的研發與整合工作還在進行),無法從FMS管道獲得。 在2024年1月5日美國海軍提出關於AN/SPY-6全速量產階段的硬體生產合約的信息徵詢(RFI)中,提到可能透過FMS管道出口SPY-6雷達系列,其中記載已經有多個國家表達過購買AN/SPY-6的興趣,但此時還沒有任何正式成立的海外軍售(FMS)項目。依照此份RFI,AN/SPY-6從2026財年進入全速量產之後將考慮到出口計畫,但原則上應該還是只能從政府間交易的海外軍售管道(FMS)輸出給盟邦。 反觀洛馬集團開發、一開始競標美國海軍AMDR項目失利的SSR固態雷達,之後繼續發展出艦載型號AN/SPY-7,很快就被美國政府批准,以相對寬鬆的直接商售管道(DCS)出口給盟邦。 在2025年5月30日,美國國防部與RTX旗下雷松飛彈與防衛(Raytheon Missiles and Defense)簽署關於AN/SPY-6的合約增修(價值5億3675萬美元)中, 包含針對德國海軍提供的部分,這也是SPY-6首次對外銷售的紀錄(透過FMS管道)。 在2025年10月8日,美國雷松正式宣佈德國選擇SPY-6(V)1相位陣列雷達來裝備F127巡防艦;SPY-6(V)1是美國柏克Flight 3飛彈驅逐艦使用的構型,每個陣面由37個RMA構成。
先進分散式雷達(ADR)/網路協同雷達(NCR) 從2020財年起,美國海軍開始為AMDR雷達編列先進分散式雷達(Advanced Distributed Radar,ADR)能力的研發預算,包括提高大掃描角度的靈敏度,以及多基雷達能力(Multistatic Radar),有助於提高反彈道飛彈以及防空作戰等任務,例如提高對匿蹤目標的探測效能,以及降低電磁跡訊(部分雷達可以關機)等。多基雷達是幾部共同工作的雷達之中,只有一部發射波束,其餘僅負責接收;一般雷達匿蹤技術都是讓敵方雷達波分散到其他方位、減少原路返回的回波強度,而多基雷達在適當的部署之下,不同接收端接收由單一雷達發射、被匿蹤目標反射到不同方位的回波,實時分享探測數據並計算出匿蹤目標的方位,如此就能大幅降低敵方的匿蹤效能;此外,多基雷達也有助於減少輻射電磁信號,不會讓所有雷達都發射雷達波束而全部暴露位置。實現多基雷達的基礎條件包括各雷達的信號處理能實現網路協同,並且達到多雷達共同運作時的精確對時。先進分散式雷達項目預定在2024財年完成。此外,雷松公司還有為美國海軍研究彈性分散式陣列雷達(FlexDAR,Flexible Distributed Array Radar,S波段操作),實現每個雷達收/發(T/R)單元都有數位成形(Digital Beamforming)控制,可擴大波束角度。 在2021年11月4日,雷松宣佈,該公司與美國海軍研究辦公室(Naval Research,ONR)成功在瓦勒普斯島測試場進行了網路協同雷達(Network Cooperative Radar,NCR)項目的展示,這是AMDR項目發展的技術。NCR項目從2016年展開,由雷松公司、ONR以及美國海軍作戰部的整合作戰系統執行辦公室(Program Executive Office for Integrated Warfare Systems,PEO IWS)聯手進行。在NCR展示中,兩部陸基雷達模擬器在通信協同之下合作,一起探測、追蹤同一批目標,透過實時(Real time)資料鏈分享數據來完成工作。NCR技術協調不同雷達偵測同一個區域,可以融合不同位置的雷達數據生成更完整、更清晰的戰區雷達態勢圖像,並且靠不同雷達彌補某些雷達受到背景環境干擾或敵方電子干擾產生的死角,此外更可以此建構多基雷達。雷松表示,SPY-6雷達系列已經能賦予海軍船艦空前的探測能力,而透過NCR之類的後端軟體架構升級,更可進一步加強SPY-6的功能,成為未來美國海軍分佈式感測能力的核心。雷松飛彈防衛(Raytheon Missiles & Defense)先進技術部門(Advanced Technology)副總裁Colin Whelan表示,NCR技術會成為將來新世代軟體定義集成天線孔徑(next-generation software-defined apertures)的基礎,透過軟體升級(包含信息密碼加固)不斷強化雷達的性能以及擴展功能。 SPY-6擴展電子戰領域 傳統上,船艦的探測雷達以及發射電子干擾波的主動電子反制設備是完全不相干的獨立設備。 然而在AN/SPY-6數位雷達的架構下,前端射頻功能完全由後端軟體定義;因此只要配合適當的軟體,SPY-6雷達的陣面就能成為全艦最強大的電子干擾機。在神盾Baseline 10的架構下,AN/SPY-6開始發展作為電子攻擊(EA)的領域,而這關係到以下技術領域的突破: 1.數位射頻記憶(Digital Radio Frequency Memory,DRFM) 與海量數據的精準採樣。SPY-6 背後的GB級網路,能將收到的敵方雷達訊號以極高解析度傳回到後端計算機。系統利用DRFM 技術,能在數位空間中「複製」敵方雷達的波形。 由於AN/SPY-6是全數位化陣列,在精確的控制下,能產生與敵方雷達完全相同、但相位稍微偏移的回波訊號,並以SPY-6天線的超大功率發射回去,使敵方雷達螢幕上出現成千上萬個虛假目標。這是過去電子戰的欺騙式干擾,但透過SPY-6的高功率以及精準波形控制,效果遠大於過去專用的AN/SLQ-32(V)4的干擾天線,而SPY-6的天線孔徑與功率可能甚至還比AN/SLQ-32(V)7/SWEIP 3的電子攻擊天線還大。 AN/SPY-6陣列強大的增益能力,使得干擾能量更為集中,例如將數十KW的能量集中在極窄的波束,燒穿(burn through)敵方干擾波的能力更優於過去的AN/SPY-1,作為聲噪干擾時的效果也比以往電戰系統增加,甚至可能直接使敵方反艦飛彈尋標器癱瘓或燒壞。 受益於AESA陣面同時運用多波束的能力,SPY-6雷達可以一邊用90%的陣列與射頻能量繼續進行防空/反彈道飛彈追蹤,再用10% 的子陣列對準敵方干擾源方向進行反干擾(ECCM)甚至壓制性干擾。 而神盾Baseline 10也開始引進機器學習(ML)的人工智能(AI)演算法,自動即時分析接收到的敵方雷達波形,根據AI模型學習過往的海量歷史數據,識別出敵方雷達型號;即便敵方雷達改變了工作模式與頻率,透過AI以及TI-16/20計算機架構的強大算力,也能在極短時間內(豪秒級)分析出規律,並自動調整AN/SPY-6的發射特性進行反反制或直接壓制,具備極強的自適應能力。 SPY-6開發電子攻擊潛力,對於日漸興盛的高超音速(5馬赫以上)威脅或者大量低成本無人機群集,可能日漸重要。面對速率5至10馬赫高超音速武器襲擊時,防禦方剩下的反應時間被大幅壓縮;而面對在大氣層上端邊緣(高度30~70km)能夠以氣動變軌的超高音速滑翔型武器,使其軌跡變得難以預測,讓攔截器攔截的難度(需精準預測點)大增。如使用電子干擾波,利用SPY-6強大的發射功率,在遠距離對敵方高超音速飛彈的尋標器進行干擾,能以光速瞬間抵達,且只需對準目標所在的扇區進行指向干擾並能可以持續照射(不像單枚飛彈攔截一失手就沒機會了),容錯率較高。如此,就能在高超音速武器末端落下階段干擾其尋標器運作,使之無法修正軌道飛向目標,墜入旁邊的海中。而使用「電子攻擊」只會消耗能量,而不是發射一枚動輒數百萬美元的攔截器。
而面對大量低成本無人機時,用單枚價值數百萬的昂貴標準防空飛彈攔截十萬美元等級的次音速一次性根本不成比例,也會輕易將軍艦的彈藥庫消耗殆盡;因此,使用電子干擾來讓大批無人機群集失效成為反無人航空系統(C-UAS)的重要領域,而SPY-6功率強大的陣面提供了絕佳條件。 |
 \
\