DBR相位陣列雷達系統(AN/SPY-4 VSR、AN/SPY-3 MFR)
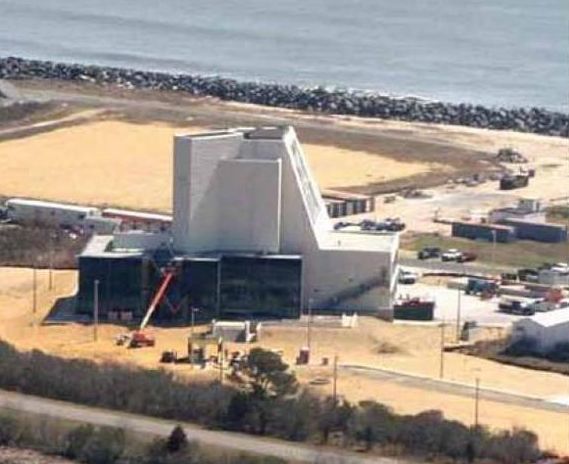
(上與下)DBR雙波段雷達的陸基原型,地點在維吉尼亞州的瓦勒普斯島(Wallops Island)的海軍工程中心。

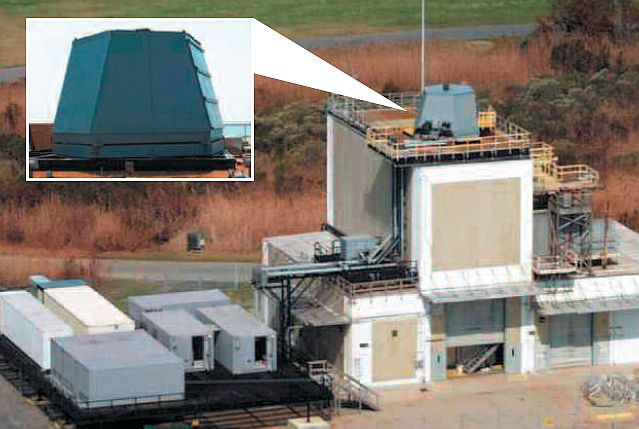
維吉尼亞州的瓦勒普島海軍工城中心的SPY-3多功能相位陣列雷達(MFR)
的一號工程原型(EMD-1),安裝在塔狀結構頂部。
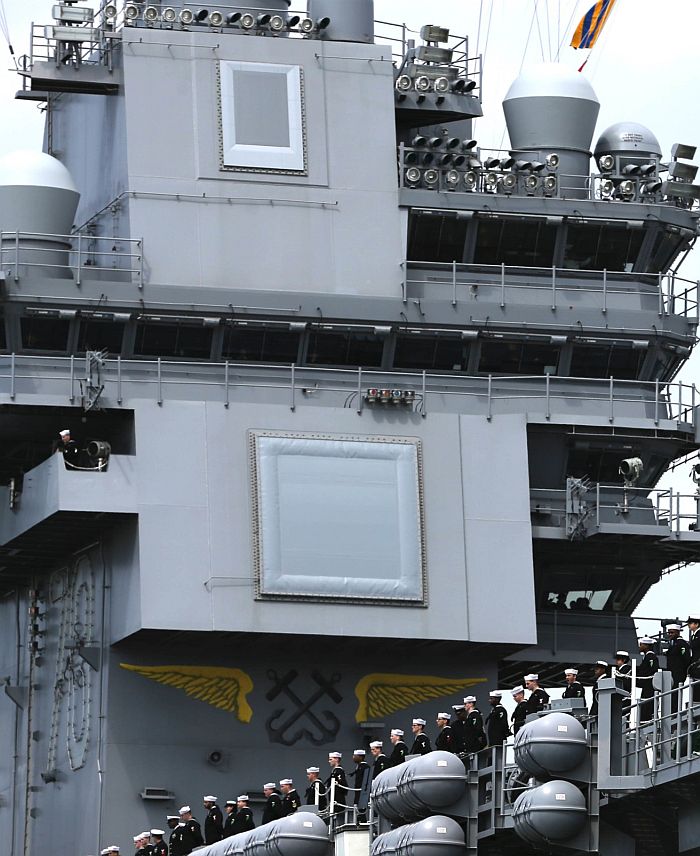
福特號(Gerald R. Ford CVN-78)核子動力航空母艦的艦橋近照。可以看到上方的AN/SPY-3 MFR多功能相位陣列雷達
以及下方的AN/SPY-4 VSR體積搜索相位陣列雷達。福特號會是唯一裝備完整DBR雙波段雷達(MFR與VSR)的船艦。
──By Captain Picard
參考資料:軍事連線90期──美國海軍AMDR雙波段雷達的起源與發展(張明德著)
|
DBR雙波段雷達 因應21世紀日趨複雜的海上作戰環境,美國海軍在1990年代末期開始發展雙波段雷達系統(Dual Band Radar,DBR),作為日後主要作戰艦艇開發的新一代雷達系統 。 在傳統的系統中,各個不同的雷達都有獨自的後端信號處理(Signal Processing,SP)與資料處理(Data Processing,DP)設備 ,雷達天線接收的原資料(raw data)先經過信號處理(SP),然後經過資料處理(DP),最後將輸出的偵測資料輸入戰鬥管理系統進行處理與整合。而在DBR架構之下,S波段與X波段雷達 則以同一套資料處理(DP)後端設備來統一處理兩部雷達的數據,使得戰鬥系統可以直接獲得整合自兩部雷達的目標軌跡資料。DBR雷達有助於減少船艦所需的雷達型號與種類,利於整合控制與電磁頻譜分配,而原本美國海軍的SPS-48E/49對空搜索雷達以及SPN-43航空管制雷達等都可一併被取代。 而對於探測低空小型目標而言,雷達後端同時結合S/X波段也會有良好的效益。一般而言,高脈衝回復率的雷達較適合探測在低空迫近的目標,但如果目標距離太遠,兩道回復太快的脈衝信號有可能重疊在一起,使得後端系統難難以判斷回跡的遠近(距離模糊);因此過去許多雷達可以切換不同的脈衝回復率,平時以高脈衝回復率來密集監視周遭空域,接收到目標回跡後立刻切換到較低的脈衝回復率來確認接觸信號是否為虛警,但這樣的確認程序又會多花費一些時間;而一些專用的短程近距離追蹤雷達的反飛彈模式就刻意將探測範圍壓縮在海平面距離以內,避免脈衝回波重疊而引來的位置模糊問題。而雙波段雷達就同時處理兩個不同頻率與脈衝回復率的雷達信號 :X波段使用高脈衝回復率盡快確認目標信號,而S波段則使用中脈衝回復率,確認同一個接觸信號的確實距離,然後將兩個雷達信號送入同一個濾波處理器。如此,雙波段雷達就不會發生選擇脈衝回復率的兩難(例如接觸目標但不確定是否為兩道靠近的回波造成的虛警,或者經過濾波器之後得出目標但不確定距離),探測並確認低空高速目標的速率大幅提高。 美國海軍早期的雙波段雷達
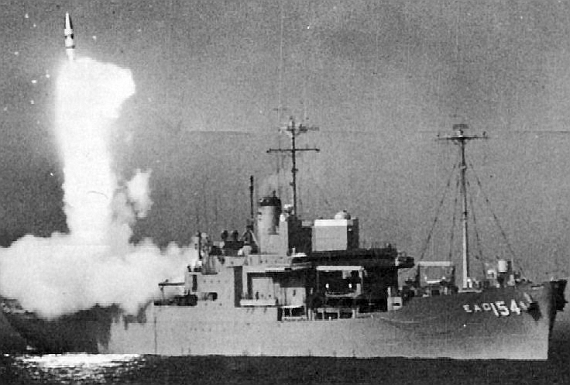
(上與下)美國海軍觀察島號(USNS Observation Island T-AGM-23 ex-E-AG-154)飛彈追蹤艦 ,該艦在1970年代末在艦尾設置大型的AN/SPQ-11 Cobra Judy S波段相位陣列雷達, 1980年代中期又在煙囪後方設置一個大型的X波段雷達(碟型天線),與 Cobra Judy 由同一後端控制,構成一種S/X雙波段雷達。
觀察島號試射北極星潛射彈道飛彈的畫面,這是觀察島號原本的任務。 美國海軍早期的S/X雙波段雷達,是1980年代安裝在觀察島號(USNS Observation Island T-AGM-23 ex-E-AG-154)飛彈追蹤艦(原本用來發射潛射彈道飛彈並追蹤軌跡)的AN/SPQ-11 Cobra Judy雷達系統;在1970年代後期觀察島號進行改裝時,首度安裝了Cobra Judy雷達系統,當時只有一套S波段相位陣列天線。在1985年時,此雷達系統又增加一部X波段、機械式的碟型天線,而S/X波段雷達由後端的Cyber 170主電腦控制(包括兩部,平時只使用一部,另一部為備援)。
原屬於忠實級(Stalwart class)音響監視船的的無敵號(USNS Invincible T-AGM-2 ex-T-AGOS-10)在 服役後期拆除拖曳聲納,加裝Cobra Gemini型S/X雙波段超寬帶雷達,改成飛彈搜索艦。
在1990年代末期,美國海軍以Cobra Judy為基礎,進一步發展Cobra Gemini型S/X雙波段超寬帶雷達(Ultra-Wideband Radar)系統來裝備無敵號飛彈測量艦(USNS Invincible T-AGM-24 ex-T-AGOS-10,原本是音響監視船)。先前Cobra Judy雷達的X/S波段分別有獨立的接收機與發射機,由同一個後端控制;而Cobra Gemini超寬帶雷達系統的X/S波段不僅由同一個後端處理器控制,連射頻功率導波與餽送都實現了雙頻共用單一硬體,包含單一大型機械旋轉拋物面天線(位於一個圓形外罩內)以及一套Cassegrain雙波段(X/S頻)雷達發射機,只在接收端分成X波段與S波段寬頻帶接收機各一。不過Cobra Gemini超寬帶雷達只是機械掃描雷達,而不是相位陣列雷達。
(上與下)2012年1月服役的哈沃德.勞倫茲號(USNS Howard O. Lorenzen T-AGM-25)配備 Cobra King S/X波段相位陣列雷達系統,此雷達的主承包商是雷松。
在2000年代初期,美國海軍開始發展用來汰換觀察島號的新飛彈追蹤哈沃德.勞倫茲號(USNS Howard O. Lorenzen T-AGM-25)所需的雷達系統,一開始稱為主動S波段雷達計畫(Active S-Band Radar program),後來演變成Cobra King S/X波段相位陣列雷達。在2003年,雷松成為Cobra King雷達的主承包商,其中X波段雷達由雷松自行開發,而S波段雷達則由諾格集團電子部門研製,兩種雷達由雷松研製的通用後端(Common Back End,CBE)來統一控制管理。其中,S波段負責廣區域搜索、目標獲得,並能同時追蹤大量目標的軌跡;而X波段雷達則針對特定目標(根據S波段雷達的提示與交接)進行高精確度追蹤。 雙波段雷達系統概要 DBR共分為兩個部分,第一是由洛馬研發的SPY-4廣域搜索雷達(Volume Search Radar,VSR),其次則是由雷松開發的SPY-3 X波段多功能雷達(Multi Fuction Radar,MFR),兩部雷達各自擁有獨立的發射/接收(T/R)陣列天線以及 屬於前端信號處理的信號接收機、激勵器,而後端信號處理、電源及冷卻系統則共用;透過共用部分設備,可以減低系統體積重量與功耗。DBR兩種波段雷達接收的信號,統一輸入由雷松開發的信號/資料處理器(Signal Data Processor,SDP)處理;SDP負責雷達資源管理、目標追蹤等後端資料處理作業,並將處理完的整合追蹤資料輸入作戰系統。因此,由VSR與MFR構成的DBR雙波段雷達系統成為全世界第一種由單一後端控制的X、S波段艦載主動相位陣列雷達。DBR雷達系統使用陣列功率控制系統(CAPS)來同時管理兩種不同雷達的運作,包含共用陣列冷卻系統(CACS)。 依照最初的規劃,MFR雷達使用X波段,而VSR則使用L波段(大於S波段),但在2003年7月將VSR的波段改為S波段(見下文)。 DBR可滿足艦上需要的所有雷達機能,包括對空/平面搜索、早期預警、防空自衛及對海對地作戰所需的追蹤/射控相關工作等等(SM-2和ESSM防空飛彈所需的上/下鏈傳輸以及終端半主動雷達照射,都由X波段的MFR提供)。VSR雷達透過大功率/大孔徑天線提供高解析度窄波束,提供遠程預警、高空目標探測、區域防空等,發現威脅之後就 把工作交給解析度更高的MFR X波段雷達,進行精確追蹤、射控接戰、飛彈上鏈傳輸等工作;此外,MFR也包負責水面搜索、導航、航空管制等任務。 在單一後端控制之下,VSR與MFR雷達能實現精確而即時的工作交班,不像過去不同追蹤/射控雷達只能根據搜索雷達的粗略提示,自行再重新搜索並捕捉目標,難免浪費時間,甚至可能發生失誤丟失目標。 美國海軍打算在DD-21陸攻驅逐艦(2001年底改為DD(X),在2006年成為DDG-1000),以及日後新造的航空母艦、兩棲艦艇上。原本最後一艘尼米茲級(CVN-77)打算採用DBR雷達系統,不過由於時程無法配合而作罷;而新一代的CVN-21航空母艦(即福特級) 則成為第一種配備DBR雷達的美國航母,美國海軍也曾考慮在大部分既有的尼米茲級(CVN-70~76)回廠改裝時,加裝DBR雷達系統。此外,美國海軍也曾考慮在取代塔拉瓦級的LH(X)(後來成為LHA-6美利堅級)兩棲攻擊艦上加裝DBR(最後仍使用SPS-48E雷達),甚至當時已經付諸建造的LPD-17型(即聖安東尼奧級)船塢運輸艦和LHD-8兩棲突擊艦都考慮日後回廠加裝。由於DBR雷達系統原本就是DD-21計畫底下的一環,因此在2001年DD-21暫時遭到擱置時,DBR的研發也一度受到影響,直到後來DD(X)計畫步入軌道時才逐漸恢復。 VSR與MFR是最先進的主動相位陣列雷達,使用全固態組件、全數位化控制的多頻道收/發模組(Transmit-Receive Integrated Multichannel Module,TRIMM)以及嶄新的天線陣列結構 。DBR也是第一種以現成商規(Commercial-off-the-Shelf,COTS)電腦技術來執行後端運算處理的雷達系統,使用開放式架構(Open Architecture,OA),COTS組件涵蓋直接數位取樣、高動態率A/D轉換器、高性能電腦和光纖傳輸(控制與信號處理工作由IBM的超級電腦負責),能大幅降低研發購置成本並利於維護升級;DBR的軟體程式也以民間的物件導向程式語言如C++、Java來開發,能完全融入全船整合運算環境(Total Ship Computing Environment,TSCE)。VSR與MFR都有各自獨立的信號處理器,但由同一套管理控制系統進行操作,能同時控制兩套雷達追蹤同一個目標,或者進行分工,並在後端自動進行資料整合 。DBR有多種作業模式,在全自動運作模式下,運作流程回路並不包含人工操作,可大幅加快反應時間並避免可能的人為操作錯誤。DBR不需要設置專門的系統操作人員與顯控台,能自動針對後端人機介面的型態進行調整,控制參數由艦上戰術執行軍官透過艦上指揮管制系統或全船整合運算環境(Total Ship Computing Environment,TSCE)輸入,能減少人工操作可能產生的參數設定錯誤。 DBR系統整個系統結構十分可靠且易於維護,內建自我診斷系統,人員只需使用筆記型電腦透過區域網路(LAN)連接DBR系統就能執行相關功能檢測與故障判定工作;更換包括雷達陣列、次系統、計算機設備等都只需要抽換相對應的TRIMM單元、電路卡或其他模組單元,設計上要求每任務年的預防性維護和修正措施(corrective and preventive maintenance per mission-year)低於100小時,每次平均維護作業時間( mean time to repair,MTTR)低於30分鐘。DBR雷達的功率消耗約2000KW,液冷系統流量900 gpm(維持在攝氏11度),熱負載約1350KW。 不同於SPY-1,VSR與MFR都只採用三面相位陣列天線;由於平板陣列電子掃瞄天線的波束偏離軸心 之後,等效孔徑(天線孔徑在波前方向的投影量)就會降低,當波束偏離軸心一定程度之後就會明顯變寬,偵測距離、解析度、增益全部顯著降低,故理論上單面天線的波束掃瞄極限被限制在偏離中心軸正負60度的範圍,也就是涵蓋120度的方位角,理論上三面天線就能涵蓋360度的方位角 。而為了確保目標通過兩面天線波束交界時仍能有效持續追蹤,一般相位陣列雷達多半將單面天線的掃瞄方位角限制在90度,並以四面天線完成360度的涵蓋。然而,VSR與MFR卻大膽採用三面天線的構型,單面天線的波束涵蓋範圍幾乎達到電子掃瞄天線的極限,這似乎意味美國廠商在信號控制與處理技術上又獲得了飛躍的進步,所以可以讓掃瞄方位提升到天線實體能力的理論上限;而減少一面天線就意味著減少25%的體積重量,系統成本亦可降低 。由於採用開放式模組化架構,DBR雙波段雷達系統可輕易整合至不同的艦體載台,並根據新的戰術需求進行擴充與升級。 以下便分別介紹VSR與MFR: 1.VSR(AN/SPY-4) VSR的技術可以追溯到早先美軍一個名為數位陣列雷達(Digital Array Radar,DAR)的計畫,這是一種L頻的長程主動相位陣列雷達。DAR的概念設計始於1980年代,參與研究的主要單位包括美國海軍研究實驗室(Naval Research Laboratory,NRL)、美國海軍水面作戰中心(Naval Surface Warfare Center,NSWC)以及麻省理工學院(Massachusetts Institute of Technology,MIT)的林肯實驗室(Lincoln Laboratory);不過直到1990年代,伴隨商規無線通信、網路、計算機領域的而開發的先進技術如直接數位採樣( direct digital sampling)、高速率/高動態範圍的類比/數位轉換器(A/D)與數位/類比轉換器(D/A)及其他微波射頻組件、高速數位計算、數位光纖控制(digital fiber-optic interfaces)等技術逐漸成熟,DAR才得以付諸實現。 在研發初期,VSR預定採用波長較長 、衰減較小的L頻,以增加遠距離傳播性能;不過L波段也由於波長太大,若要獲得與S波段相當的波束寬度(即解析度),就需要更大的天線孔徑(距離分辨率則利用脈衝壓縮技術來彌補),勢必會對艦艇的系統配置造成困擾,除非將多個輻射單元配置在一個T/R模組上,而不是每個單元使用一個T/R模組,能降低所需的尺寸重量。此外,美國海軍也考慮到先前神盾系統的SPY-1被動相位陣列雷達已經累積了豐富的S波段操作/信號處理經驗,同時期洛馬集團也在美國海軍資助下開發使用固態元件版的主動相位陣列雷達(曾有SPY-1E或SPY-2等非正式稱號),因此在2003年6月30日正式將VSR改為S波段。 DAR的數位信號處理完全圍繞著波束成形器(beam former)與波形產生器(waveform generator);數位發射波形(Digital transmit waveforms)與控制信號產生後,轉換後經由光纖傳輸線傳輸到天線陣列後方的數位/微波發射/接收器( digital/microwave Transmit/ Receive,T/R)單元,合成雷達波束並輻射至空中。為了應映挑戰性日益增加的防空與反飛彈任務(包括面對低雷達截面設計的目標或超音速掠海飛彈等小型高速目標),新一代海軍雷達需要高的功率/孔徑增益(Power-Aperture-Gain/PAG),使得從目標反射的回波增強;而在近岸作業時,雷達會接收到來自四面八方的地形背景回波、來自各種人為裝置的電磁波(如手機基地台、各式岸基雷達)或敵方電子戰裝備發射的干擾波,對雷達後端處理硬體造成更大的壓力,這些包括高動態範圍(dynamic range)、相位雜訊(phase noise)、系統穩定、分離諧波(isolation and spurs)等等;過去只著眼於大洋背景環境的艦載雷達,無法面對這樣嚴苛環境的挑戰,傳統雷達的動態範圍也無法忽略如此強大的雜波而不造成接收端飽和。此外,為了降低雷達信號被敵方探知的機率,新一代的雷達朝向低截獲率(Low Probability of Intercept,LPI)的領域發展,也影響著雷達硬體的發展。 針對這些問題,新一代的數位相位陣列雷達更廣泛地使用數位化的後端處理組件;一般而言,數位化陣列雷達在接收處理端將雷達波數位化(透過類比/數位轉換器,ADC),使得偵測速率、信號動態範圍都增加,並引進數位化的自適應波形(daptive beamforming)來適應自然環境或人為電子戰措施帶來的複雜電磁干擾(complex electromagnetic interference,EMI),在有背景雜波干擾的情況下仍要能有效偵測到小型高速移動目標的回波,此外還包括有效探測彈道飛彈這類高高度、高速度的目標。靠近海岸時,敵方電子戰裝置的干擾信號可能從四面八方而來,妨礙雷達陣列對目標形成波束;傳統的類比波束成形是將陣列上所有的類比信號積分後才傳入ADC轉為數位信號,這在面對強烈電磁干擾時將不敷使用;因此,新型數位陣列雷達在每一個射頻組件後方都設置一個類比/數位轉換器(ADC),將每個天線單元接收的回波轉為數位信號,並由一個數位波束成形器(Digital Beam Former,DBF)來處理所有陣列單元回傳的數位信號而形成波束。此種新設計具有許多好處,包括增加波束成形的彈性、改進時間/能量管理(time-energy management)、增加信號的動態範圍等,而隨著電子技術的進步,這種高度數位化的雷達的製造成本將逐漸降低。 在2007年下旬,VSR被美國海軍賦予AN/SPY-4的正式型號。SPY-4全系統由三個主動電子掃描相控天線、甲板上的接收/激勵器(Reciver Exciter,REX)、甲板下的信號與資料處理器(SDP,與SPY-3 MFR共用)構成,每個天線陣列都還附帶處理波束成形和窄頻下變頻的機櫃。每面陣列天線尺寸為4.06mx3.86m(160x152英吋),厚度0.76m(30英吋) (另一說長度、寬度、厚度分別是4.1、4.0、1.01m),三具天線總重10.215ton,後端系統總重28.56ton。VSR負責遠距離對空與對海搜索警戒、氣象偵測等,有效偵測距離463km以上(最遠超過500km), 用來取代美國海軍現役的SPS-48、49等長程對空雷達(現階段神盾艦艇的SPY-1A/D相位陣列雷達的最大有效偵測距離在330km以內,比起SPS-48的430km與SPS-49的460km仍有一些差距)。 不過VSR雷達並沒有將2000年代以後美國日益重視的反彈道飛彈能力納入考量,這可能是因為VSR以裝備DD-21陸攻驅逐艦為主,而反彈道飛彈功能則另有CG-21防空巡洋艦(後來的CG(X));如果VSR也包含反彈道飛彈功能,勢必導致開發成本與時間的增加,對DD-21不僅沒有必要,甚至可能讓美國國會認為CG-21與DD-21同質性高,進而危及CG-21的發展。 與神盾系統的SPY-1D相位陣列雷達相較,採用主動技術以及更先進訊號處理科技的DBR擁有更好的解析度,且對抗陸地背景雜訊與反電子干擾的能力也會大幅增強。VSR的主要技術關鍵在處理頻寬超過10GHZ的隨機波形時,對T/R單元的精度構成考驗。洛馬在2002年12月展開VSR的原型測試,並在同年12月18日成功追蹤到第一個測試目標。不過VSR在測試中發現其T/R模組於全功率運轉下出現可靠度不足的問題,如要重新設計T/R模組則會導致成本與時程大幅膨脹。美國海軍分析後,認為VSR能在較低功率標準下滿足任務需求,於是同意洛馬將VSR的功率標準降低,如此可改善T/R模組的運作可靠度以及使用壽命,也避免了重新設計T/R模組。 在2010年6月2日,美國國防部突然決定刪除DDG-1000的VSR雷達系統 ,只保留MFR雷達;此外,艦上保留安裝AMDR相位陣列雷達(見下文)的空間。由於VSR/MFR的發展都堪稱順利,性能也符合預期,因此美國國防工業界一度對於DDG-1000刪除VSR雷達的原因感到不解 。依照國防部說法,取消VSR的最立即原因是為了節省成本(估計每艘DDG-1000可節省1至2億美元),以因應美國海軍沈重的預算壓力。另外,VSR計畫開始的時間較早,原始規劃沒有納入反彈道飛彈的能力;而較晚展開、原本作為CG(X)防空巡洋艦偵測系統的空中與飛彈防禦雷達(AMDR),一開始就將反彈道飛彈規劃於其中;在2008年 ,美國海軍決議DDG-1000並不需要負擔彈道飛彈偵測任務,因此VSR雷達的急迫性相對較低。另外,據說當時美國海軍也有意將來在DDG1000上直接安裝AMDR,所以捨棄了VSR,不過此時AMDR項目都還沒有具體成形。 這項重大變更帶來廣泛衝擊,首先是VSR雷達的安裝數量大幅減少,只剩下航空母艦裝備完整構型的DBR雷達,將使DBR雷達的單位成本大幅增加,衝擊CVN-78航空母艦以及DDG-1000驅逐艦的項目管理。此外,原本全規模DBR雷達的整合測試工作依附於DDG1000驅逐艦,VSR雷達從DDG1000刪除後,這些整合測試工作通通落在CVN-78航空母艦項目之上,進一步加劇這個已經有太多新技術風險(包括EMALS電磁彈射器、AARS先進攔阻系統等)的新型航空母艦項目中。再者,DDG1000取消VSR之後,MFR雷達還需要進一步修改來填補原本VSR雷達的工作。 2.MFR(AN/SPY-3) MFR的型號為AN/SPY-3,使用波長短而精確度高的X頻,主要任務為中距離以內的對海/對空目標 搜索、對陸地搜索、目標自動精確追蹤、目標識別、武器射控(包含飛彈在中途飛行階段的上/下鏈傳輸更新,以及終端間斷照明波)乃至航空管制等。MFR雷達的功能涵蓋美國海軍過去的AN/SPQ-9/MK-23 TAS等短程追蹤/射控雷達 、AN/SPS-67平面搜索雷達、MK-91火控照射雷達、航空母艦上的AN/SPN-41/46進場控制雷達等功能,其解析度足以及時搜獲超高音速掠海低RCS目標 、未來的先進匿蹤巡航飛彈(ASCM)、小型低飛的UAV,或者海面上的潛望鏡與水雷 。SPY-3的設計十分著重於在近海複雜的電磁環境下(包含地形回波、來自岸上其他電磁輻射干擾以及敵方電子反制),仍能有效對低空飛行的飛彈進行自動探測、追蹤與射控工作。 SPY-3全系統由三個主動電子掃描相控天線、甲板上的接收/激勵器(REX)、甲板下的信號與資料處理器(SDP,與SPY-4 VSR共用)機櫃構成,每面天線尺寸為2.72X2.08m(107x82英吋),厚度0.635m(25英吋), 三具天線總重2.5ton,每部天線陣列由5000個T/R單元構成,每8個T/R構成一個能快速拆換的多頻道收/發模組(T/RIMM), 後端系統總重20.44ton,最大搜索距離約320km。SPY-3是美國海軍第一種完全以商規技術開發的艦載雷達,其信號/資料處理器採用IBM、HP與Sun等民間廠商的商規產品,軟體也由民間的C++程式語言撰寫。SPY-3的自動化與整合程度極高,不需要設置專屬的顯控台,其獲得的資料自動餽入艦上的戰鬥指揮系統,後續的追蹤、射控也全權由射控系統來指揮負責。 雷松宣稱,透過新一代固態T/R組件模組以及良好的模組化系統設計,SPY-3能維持連續七天、24小時不間斷的長時間作業要求,期間系統可用性達95%以上,每個任務年(mission-year)所需的校正維護工作低於100小時,故障修復所需時間(MTTR)約30分鐘,而這些指標都與VSR/SPY-4相同。 由於SPY-3功能廣泛且採用模組化設計,縮小規模之後十分適合用於小型作戰艦艇上,雷松海軍與海事整合系統部門(Raytheon's Naval and Maritime Integrated Systems,N&MIS)也打算拓展其外銷機會;例如,雷松已經與歐洲Thales集團展開合作,進行一項名為SEAPAR的計畫,以SPY-3為基礎開發一種X頻多功能相位陣列雷達偵測與射控系統,作為北約盟國未來新造水面艦艇的偵測與自衛裝備 ,此合約也包括與歐洲Thales集團的合作(Thales集團也有兼具偵測、追蹤與飛彈射控的X波段APAR艦載相位陣列雷達系統)。 由於AN/SPY-3 MFR雷達也負責防空飛彈的中途資料更新以及終端火控照射工作,其數位波束成形的間斷照射波(Interrupted Continuous Wave Illumination,ICWI),和向來美國海軍用來上鏈傳輸與終端照射的連續波(Continuous Wave Illumination,CWI)不同;而先配合神盾艦版的SM-2、ESSM都使用S波端資料鏈來配合SPY-1雷達的上鏈傳輸信號,改用SPY-3 MFR雷達之後自然也改成X波段資料鏈。因此,配合SPY-3 MFR的標準SM-2以及ESSM防空飛彈都需要專門的版本,包括修改包括尋標器軟硬體來適應ICWI照射波,以及加裝數位化波束成形與控制的聯合通用波形資料鏈(Joint Universal Waveform Link,JUWL)來配合MFR的數位化控制上鏈波束。美國海軍選擇了標準SM-2MR Block 3A構型來修改成松華特級驅逐艦專用版本,稱為SM-2 Block 3AZ。也因此,松華特級的所有主要武器裝備包括AGS艦砲、防空飛彈等,幾乎都是專門訂製,與艦隊中其他船艦不同,大幅增加了後勤保障的困難度。 在2010年6月,美國國防部決定刪除DDG-1000的SPY-4 VSR雷達,松華特級的主要雷達就只剩一組SPY-3。為了彌補松華特級取消VSR雷達的空缺, 美國海軍責成雷松修改SPY-3的後端控制軟體,增加VSR作業模式。SPY-3的探測波束可選擇在水平向或垂直向的優化;在VSR模式下,SPY-3的雷達波束以水平方向優化,此時只有有限的垂直像探測能力。由於VSR搜索與水平搜索的雷達射頻資源分配方式有先天矛盾,以SPY-3的射頻資源,很難同時兼顧執行這兩個模式,只能針對其中一種模式優化而犧牲另外一種。相較於荷蘭Thales的APAR、法國ARABEL等X波段艦載相位陣列雷達,SPY-3的天線陣列面積大了三、四倍(APAR每個陣列天線的直徑僅1m),因此雖然使用波長較短的X波段,但SPY-3先天上的長距離探測能力仍然相當不錯,達到300km以上(而APAR的實用對空搜索距離約150km)。 然而,原本MFR的工作是負責監視中/近距離空域,並且根據VSR廣區域雷達的目標提示,預先對有大量目標來襲的空域進行密集監視與目標跟蹤,同時分出一些波束資源來導引防空飛彈接戰(含終端照射)。而松華特級的VSR被取消之後,MFR變成要單獨負責廣區域搜索、追蹤監視以及飛彈射控,即便SPY-3修改後端軟體後可以執行VSR的每一項功能,一手包辦則顯得備多力分。尤其是MFR使用的X波段的工作距離先天較短,擔負廣區域搜索對其射頻資源不僅吃力,廣區域搜索的資源分配(波形與波束分配等)也與水平線搜索等工作矛盾;更不用提飛彈射控與終端照射,波束需要密集地停在目標來襲方位直到引導飛彈命中,同時間能分出去執行廣區域搜索的射頻資源更捉襟見肘。 因此,SPY-3無法同時有效執行廣區域搜索(VSR)、水平搜索與終端照射這三個功能;萬一敵方大量飛彈同時來襲,而不得不分出太多射頻資源去追蹤與射控,系統甚至可能崩潰。因此,只裝備SPY-3的松華特級雖然還是具備一定程度的區域防空能力,但不具備反彈道飛彈防禦(對於廣區域搜索很吃重)的潛力。 依照2014財年預算,美國海軍為松華特級驅逐艦三號艦林登.詹森(USS Lyndon B. Johnson DDG-1002)購置AN/SPY-3雷達的費用是1.85億美元,加上整合安裝、保障支持、訓練等其他項目的總費用達2.58億美元,十分昂貴。 DBR雷達研製進度
福特號核子動力航空母艦(USS Gerald R. Ford CVN-78)的艦島,下方較大的陣面是 S波段的VSR(AN/SPY-4)相位陣列雷達,上方較小的陣列是X波段的MFR(AN/SPY-3) 相位陣列雷達。由於美國海軍雷達發展計畫的演變,福特號將是唯一一艘安裝完成VSR/MFR 雙波段雷達的艦艇。
由後方看福特號的艦島,可以看到AN/SPY-4 VSR雷達(下)與AN/SPY-3 MFR雷達(上) 在2000年度,美國海軍研究辦公室(Office of Naval Research,ONR)決定針對DBR展開設計、發展與概念展示階段,生產一套原型進行測試,相關技術自然成為VSR的重要依據,該年度DBR獲得美國國會1200萬美元的撥款。VSR的初步原型在2002年展開測試,工程發展原型在2006財年進行測試。 在2000年美國國防預算中,首度編列的VSR的發展預算,金額為1200萬美元。在2002年,洛馬完成 VSR的第一部原型 雷達,同年12月開始測試,在12月18日首次成功追蹤目標,並與MFR雷達原型一同進行發展測試。VSR的第一部工程發展(EDM)原型在2006預算年度展開測試,最初預定在2013年達成初始操作能力。 在2006年8月,VSR位於新澤西的摩爾斯頓(Mooreston)完成初步驗證,隨後雷松與美國海軍在2007年10月將VSR雷達雷達安裝在加州懷尼米港(Port Hueneme)的文圖拉郡(Ventura County)海軍基地的水面作戰工程設施(Surface Warfare Engineering Facility),與SPY-3 MFR合組成艦載飛彈防禦套件(Shipboard Missile Defense,SMD),並展開測試。在2007年下旬,美國海軍賦予VSR正式型號AN/SPY-4。 在2008年10月,雷松獲得美國海軍價值2350萬美元的合約,為首艘福特級航空母艦福特號(USS Gerald R. Ford,CVN-78)供應DBR雷達系統,以先前為DDG-1000驅逐艦設計的DBR系統為基礎。
安裝在瓦勒普斯島美國海軍水面作戰系統中心的SPY-3一號工程發展原型(EDM-1)。 MFR方面,在1999年6月,美國海軍將SPY-3 MFR雷達的工程製造與發展合約頒給雷松公司,價值1.4億美元。第一座SPY-3工程發展型雷達(Engineering Development Model,EDM。稱為EDM-1或XN-1)於2001年開始製造。 從2002年3月起,雷松開始在維吉尼亞 州的瓦勒普斯島(Wallops)美國海軍水面作戰系統中心(U.S. Navy's Surface Combat System Center)的測試場建造一座模擬DD(X)上層結構的陸基實驗設施,用來進行SPY-3(XN-1)的測試,此雷達 設施於2003年6月26日交付美國海軍水面系統作戰中心,隨即展開為期2年的測試(含DT/OA等階段)。在2004年底,SPY-3(XN-1)與另一部S頻遠程搜索雷達成功地進行了一項同步運作測試,過程中兩者並未發生電磁兼容性方面的問題;而這場測試的成功對於2005年底DD(X)的最後評估將有很大的幫助。緊接著,這套原型雷達又在中國湖實驗場進行電磁干涉(EMI)實驗。至於第二套SPY-3工程發展原型(EDM-2)則被安裝到由除役的史普魯恩斯級驅逐艦保羅.佛斯特號(ex-USS Paul Foster DD-964)改裝成的自衛系統測試艦(Self Defense Test Ship,SDTS)上,在2006年5月成功完成一系列海上操作測試。 相較於VSR,AN/SPY-3開發進度較快,過程也比較順利。
SPY-3二號工程發展原型(EDM-2)安裝在保羅.佛斯特號(ex-USS Paul Foster DD-964) 自衛系統測試艦(SDTS)的後桅杆平台。SPY-3裝在保羅.佛斯特號上直到2020年。
安裝在瓦勒普斯島水面作戰系統中心測試場的DBR雙波段雷達原型。 在2009年1月,雷松在維吉尼亞州瓦勒普斯島(Wallops)的海軍工程測試中心進行完整的DBR雷達(含SPY-4與SPY-3)的測試;隨後,DBR雷達系統在2009年4月完成了首次啟動(light up)以及全功能測試,正式從工程發展模型階段(EDM)進入長週期的作戰性能評估階段。在2009年11月,雷松宣布整套DBR雙波段雷達系統通過關鍵設計審查 。不過美國政府審計署(GAO)在2009年3月30日發佈的DD(X)關鍵技術審查報告中,仍將SPY-4 VSR列為不成熟的技術項目,發展進度比原訂延遲兩年;此報告指出2009年1月SPY-4與SPY-3的聯合測試中,SPY-4並未使用雷達罩,而且SPY-4的功率輸出低於要求。在陸地測試中,就發現VSR有時無法持續追蹤飛彈並進行接戰,經常容易受到雜波干擾或顯示虛警,或者無法精確指示目標的位置。 根據2010年5月初的報導,在維吉尼亞州瓦勒普斯島海軍工程中心進行測試的DBR陸基原型,首度成功以單一RSC控制組件同時控制SPY-4 VSR與SPY-3 MFR雷達對同一目標實施雙波段追蹤。此次測試項目除了VSR、MFR雷達同時對同一目標進行截獲與追蹤之外,也驗證在精確追蹤模式下,由VSR雷達將目標自動交班給MFR雷達接手追蹤的能力。 然而就在2010年6月,美國國防部宣布將SPY-4雷達從DDG-1000刪除,只保留SPY-3雷達。 依照2013年9月5日美國政府審計組織(GAO)的報告,福特號航空母艦(CVN-78)的發展面臨成本高漲與進度落後,其中包括DBR雷達在內的幾個關鍵系統的落後超支是重要原因。DBR項目的發展與測試工作原本應會配合DDG1000驅逐艦來進行,然而2010年6月美國海軍將SPY-5 VSR雷達從DDG-1000項目刪除,導致完整的DBR測試發展工作只能落在CVN-78航母項目,而這樣的中途變更自然拖累了CVN-78原本的進度。美國海軍打算在2012財年使用SPY-4量產版的組件繼續推動SPY-4的陸地測試,但由於合約延誤,到2013財年時SPY-4只能繼續使用原型雷達進行測試。 依照原計畫,DBR的整合測試計畫在2013年9月出爐,2014財年SPY-3的量產版本完成最終陸地測試,同時SPY-4原型則完成陸地測試;在2016財年,DBR雷達隨著CVN-78航空母艦的交付而展開全系統艦上測試,並在2017年2月展開整合測試。在2008年時,安裝在CVN-78的DBR的相關總成本預估是2億190萬美元;然而到2013年9月5日GAO報告出爐時,已經上漲了139.7%,達到4億8400萬美元。因為DBR雷達交付進度落後,新港紐斯船廠只能先將航母建成,等DBR交付時才在原本已經封閉的上層結構開洞,以裝載設備,這些都增加了額外的成本與耗時。 在2012年7月31日,雷松獲得美國海軍關於DBR雙頻雷達系統的兩個發展合約,價值5360萬美元,主要工作是改進系統軟體來增加功率使用效率,並為下一階段的測試評估(Operational Test & Evaluation,DOT&E)做好準備。DBR的DOT&E在2012財年完成,並排定在2013年1月在瓦勒普斯島(Wallops Island)進行航空管制測試。為了進行完整的DBR雷達測試,美國海軍在2013財年重新啟用安裝在瓦勒普斯島(Wallops)的戰鬥系統中心(Combat System Center)的SPY-4雷達工程發展原型(Engineering Development Model,EDM),並加裝一套AN/SPY-3 MFR雷達的量產型。當時海軍打算在2015年以後在瓦勒普斯島繼續測試DBR,但不確定屆時MFR雷達是否還有相關經費;如果沒有,則福特號交艦時(當時預定2015年),對該艦DBR雷達的各項壽命週期支持(如測試、升級、問題修正等)恐怕會出問題。 DBR與VSR的終點 由於DBR價格昂貴,無法依照原本的構想,普遍取代艦隊中的AN/SPS-48與AN/SPS-49對空搜索雷達 。原本美國海軍希望在最後一艘尼米茲級老布希號(USS George H.W. Bush CVN-77)上裝置DBR雷達系統,但隨後延遲到接下來的福特級(Ford class)航空母艦才裝備DBR。原訂配備DBR的松華特級的建造總數量也大幅減少(只建造二到三艘,而不是最初計畫的30艘),連帶使DBR的訂購數量大幅降低,單位成本變得十分昂貴。AN/SPS-48與AN/SPS-49雷達在美國海軍的主要用戶是航空母艦、兩棲艦艇,這些艦艇只需要擔負防空自衛任務,基於成本效益,根本不可能安裝昂貴的DBR雷達系統(這些艦艇也不需要DBR的所有功能)。而真正裝得起昂貴防空雷達系統的專業防空艦艇如柏克Flight 3,卻改用具備反彈道飛彈能力的AMDR,這都讓DBR的定位變得十分尷尬;此外,AMDR使用的技術與硬體架構也與DBR又有不同,當AMDR確定會擁有數量眾多的柏克Flight 3用戶時,採購數量稀少的DBR就會形成後勤上的累贅。而更糟的是,洛馬集團開發的AN/SPY-4 VSR雷達一直面臨成本超支與進度落後。 因此從2014年中,美國海軍又開始發展企業對空監視雷達(Enterprise Air Surveillance Radar,EASR)。EASR是基於2007年開始發展的對空與飛彈防禦雷達(Air and Missile Defense Radar,AMDR,後來正式型號為AN/SPY-6 )的技術為基礎,用來接替AN/SPS-48與AN/SPS-49對空搜索雷達。由於松華特級驅逐艦刪除了VSR而只保留MFR,因此福特級航空母艦福特號(USS Ford CVN-78)就成為美國海軍唯一一艘採用完整構型DBR雷達系統,以及唯一一艘配備AN/SPY-4 VSR相位陣列雷達的艦艇(福特級從二號艦開始就會引進EASR雷達)。 因此,EASR實質上接替了AN/SPY-4 VSR雷達,這意味洛馬集團在美國海軍21世紀前期S波段艦載固態相位陣列雷達領域上全面挫敗。洛馬在AMDR雙波段雷達的競爭中敗給雷松,EASR在2016年8月也確定由雷松擔任主承包商,而洛馬的VSR只會裝在一艘船艦上(福特號航空母艦),可說是遭到棄用。在2020年7月14日,雷松工程設計整合(Engineering Design Raytheon Integrated)獲得價值970萬美元的合約,為DBR雷達進行組件更新以及相關的工程設計。 在2020年7月14日,雷松工程設計整合(Engineering Design Raytheon Integrated)獲得價值970萬美元的合約,為DBR雷達進行組件更新以及相關的工程設計。
|