美國海軍聲納系統(潛艦)
一張1960年代大鯧鰺級(Permit class)核能攻擊潛艦的AN/BQQ-2整合聲納系統布置示意圖。
球型物體是AN/BQS-6主/被動球型陣列聲納,陣列後方有一塊檔板(Baffale)隔絕來自潛艦本身的噪音。
排列在艦首的是AN/BQR-7低頻被動陣列聲納的聽音陣列。之後美國海軍鱘魚級、洛杉磯級等
核能攻擊潛艦的艦首聲納佈局都與此類似。
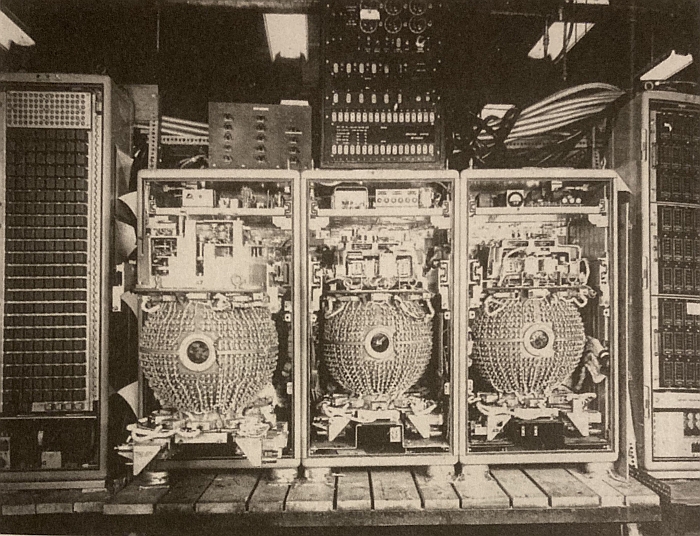
一個安裝在早期鱘魚級核能攻擊潛艦(1962到1964財年編列)的AN/BQS-6B球型陣列聲納的內部照片,
中間三個球體是三個用來生成波束的子陣列,子陣列透過內部的機械變向器來改變波束指向。外部大球體
陣列上的1241個聽音換能器,每個都有接線連到三個子陣列上相對應的位置,結構非常複雜。三個球狀子陣列
兩側是發射機(transmitter)機櫃,總共有六個機櫃,其設計是基於先前雷松為美國之聲(Voice of America)
電台發展的無線電發射機。

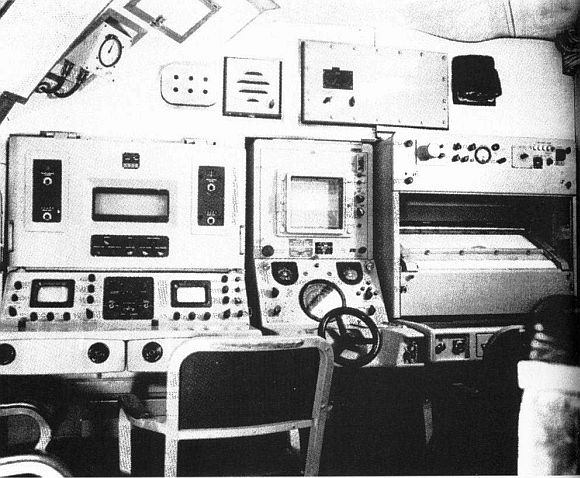
建造中的維鱘魚級核子攻擊潛艦USS Trepang (SSN-674)曾經使用的AN/BQQ-5聲納的顯控台。
AN/BQQ-5是美國海軍第一種全數位化的整合式潛艦聲納。

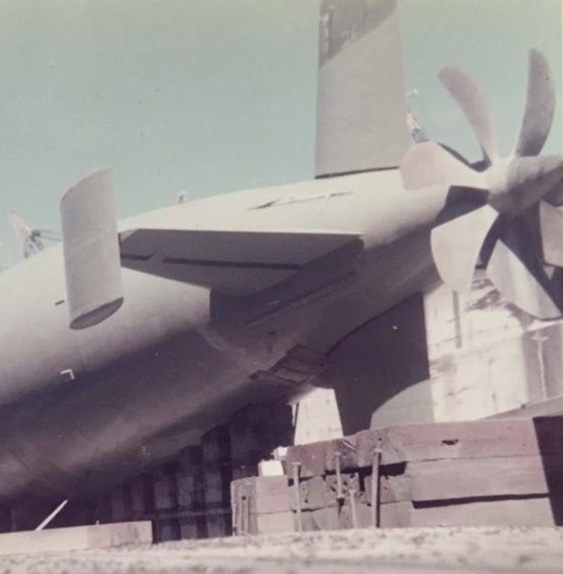
進入乾塢維修的洛杉磯級核子攻擊潛艦拉霍亞號(USS La Jolla SSN-701)的艦尾,此時螺旋槳和後部水平翼兩側
尖端的垂直安定面都已經拆除。水平翼兩側尖端頂部可以看到拖曳陣列聲納施放口,左邊為
TB-23/29細線拖曳聲納,右邊為TB-16粗線聲納。注意艦殼右側突起的就是收容TB-16纜線的管狀結構。

海狼號(USS Sea Wolf SSN-21)核能攻擊潛艦的艦首球型聲納陣列:上方的大型圓球是直徑24英(7.315m)的
被動聲納陣列,下方連接在一起碗型陣列的是 主動陣列聲納。球型被動陣列聲納外部則是用來架設艦首
低頻被動聲納的陣列(三層)。
建造中的維吉尼亞級核能攻擊潛艦維吉尼亞號(USS Virginia SSN-774)艦首,
用黑色塑膠布包起的是BQQ-10聲納系統的大型球型陣列音鼓。
──By Captain Picard
|
潛艦用聲納系統: 自從1960年代服役的 白鲑魚號(USS Tullibee SSN-597)與大鯧鰺級核能攻擊潛艦開始,美國攻擊潛艦都採用完整的聲納套件,包含艦首球型主/被動陣列聲納、艦首等角低頻被動陣列聲納、拖曳陣列聲納等等。由於球型聲納佔滿了艦首,美國現代化核能潛艦的魚雷管便向後移至兩側,從側面以十度斜向伸出。 被動式水下射控聲納(PUFFS)
1960年服役的白鲑魚號(USS Tullibee SSN-597)核能攻擊潛艦,可以看到 BQG-1被動式水下射控聲納(PUFFS)的三個鰭狀聽音器,分別安裝在 艦首、中部、艦尾。 美國海軍在1950年代後期展開一項名為被動式水下射控聲納可行性研究(Passive Underwater Fire Control Feasibility Study,PUFFS)的研究。通常美國海軍船艦聲納系統都由海上系統司令部(NAVSEA)主導發展,但PUFFS的技術卻是由美國海軍彈藥局發展而成。 PUFFS基本原理是在潛艦上遠隔佈置三組相隔一段距離的被動水聲聽音器(分別安裝在在艦艏、艦體中部與艦尾上方)構成聽音陣列,每兩個水聽器一組。PUFFS工作時以「波前圓弧測距法」計算,測量同一目標聲波抵達任兩具聽音器(如前-中、中-後)的波前曲率,聲波被聽音器截收後轉換為間隔50微秒(μs)的二進位數位訊號,並比較聲波信號抵達兩個聽音器的時間差;由於兩個聽音器之間的距離以及聲速為已知(前提是必須先正確得知聲波在該處水域傳遞的速率),遂以此距離為基線,在聲波波前是圓弧形的假設下,利用接收到信號的時間差計算出圓心,推算出波前的角度(方位);如果有三個聽音器,經由兩兩比對而得到兩個精確的聲源方向,而兩個方系再透過三角定位就得到聲源的距離。「波前圓弧測距法」堪稱三角測距法的變形,三角測距法是基於兩個點量測到的目標角度,搭配已知的基線長度(兩個測量點的距離),換算出目標距離。PUFFS在相距離較近的情況下,無須本艦機動進行目標動態解析(TMA,註1)作業,就能直接以單一聲源信號來斷出距離;但如果目標距離遠到某種程度,聲波波前趨近於直線,PUFFS的「波前圓弧測距法」就無效了,此時仍要進行常規的TMA作業。 PUFFS的「波前圓弧測距法」,最初是源於1940年代末美國海軍彈藥局數學家Herman Ellingson博士關於地下核爆的地震波的研究;Herman Ellingson利用多具相隔甚遠的地震儀來檢測地下核爆的力量,將每個地震儀的紀錄紙帶拿來比對,可以觀察到震波在不同地震儀的「極性」(Polarity)的重合點(會有時間差),Ellingson遂發展出「極性重合比對」(Polarity Coincidence Correlation)技巧。隨後Ellingson很快想到,這技巧可用於水下聲納系統,將不同聽音器偵測到的同一聲波的極向重合,透過時間差計算出聲波的「弧度」,進而推算出聲源方向。在1951年,Ellingson藉由調整錄音帶讀取頭的時間差形成可調式延遲線(Delay Line)驗證其理論。在反潛戰中,由於聲源(敵潛艦或魚雷)會高速移動,所以需要能即時(Realtime)進行極性重合比對才有意義。因此,美國海軍彈藥局的科學家運用當時的數位技術,發展出「延遲線時間壓縮器」(Delay Line Time Compressor,DELTIC),能同時比對多個時間差。在1955年,DELTIC成功完成了海上試驗。接著,彈藥局以10MHz的真空管數位電路,搭配石英延遲線記憶體與介電記錄器(dielectric recorder),實作出前述的聲波比對機制,並發展出量產的PUFFS系統。PUFFS的DELTIC能產生500道不同時間差的延遲線,每25ms可以比對完一輪;聲學信號被同時傳送到這500道延遲線,透過觀察信號與哪一道延遲線的極性重合,就得知波前抵達兩個感測器的時間差是多少。 從1957年起,美國海軍陸續發展出BQG-1/2A/3等實驗型PUFFS聲納系統,接著在1960年代推出實用化的BQG-4;型號前綴使用BQG(G代表射控)而不是一般潛艦聲納系統的BQS,是因為海上系統司令部(NAVSEA)對於彈藥局自行主導研發的PUFFS頗為反感。 最早的PUFFS版本稱為BQG-1安裝在長尾鯊號(USS Thresher SSN-593)與白鲑魚號(USS Tullibee,SSN-597)核子動力攻擊潛艦上測試,陣列由四個鰭狀的水聽器構成,安裝在艦體上部與艦艉外側;由於核子攻擊潛艦的航速區間較高,為了降低航行阻力,安裝在長尾鯊級的PUFFS系統採用伸縮式天線,可縮回艦體降低阻力,稱為「微型PUFFS」(micro-PUFFS)。依照最早的BQG-1的經驗,美國海軍發展出BQG-2,安裝在後續的大鯧鰺級核子攻擊潛艦上。BQG-2有六組水聽器陣面,分別安裝在艦首、艦體中部與尾部,每組由兩個水聽器構成(分別在左、右側);為了降低航行阻力,BQG-2的前兩組水聽器都嵌入艦殼側面,艦尾的兩片水聽器則分別安裝在水平尾舵外側。
美國海軍大鯧鯵級核子攻擊潛艦無鬚魮號(USS Barb SSN-596)水平尾舵兩側 的垂直安定面上裝有PUFFS的後聽音陣列;而前兩組聽音陣列分別嵌在 艦體前部與中部的艦殼上。 而為GUPPY III升級計畫等柴電潛艦使用的PUFFS版本為BQG-4,有三組片狀水聽器(每組兩個,共六個)構成的陣列,三組分別設置在艦首、艦體中部與艦尾。由於柴電潛艦航速區間較低,因此這些鰭狀水聽器直接安裝在艦體上部,外觀十分顯著,被美國海軍潛艦部隊暱稱為「迷你帆罩」(mini-sails)。 根據測試結果,BQG-4面對以通氣管航行狀態的柴電潛艦(聲噪較高)的有效工作距離為7000至9000碼(6400~8229m),此時測距精度為200碼(182.9m),波束角約30度;而對10000至15000碼(9144~13716m)距離、通氣管航行狀態的潛艦時,測距誤差約2%)。 安裝AN/BQG-4 PUFFS聲納系統的美國潛艦包括接受 GUPPY III 改良的柴電潛艦、搭載獅子座(Regulus)巡航飛彈的灰背魚級( Grayback class)柴電潛艦、新造的刺尾魚級以及海鲫號等柴電潛艦。 PUFFS在長尾鯊號/大鯧鰺級等核子潛艦上的BQG-1/2效能並不理想,效能比安裝在柴電潛艦上的BQG-4有一大段落差,因此美國海軍放棄原訂在之後核能攻擊潛艦上部署BUFFS的計畫。依照Friedman的書籍,PUFFS在長尾鯊號之類的核子潛艦上的主要整合問題,在於PUFFS並不適合安裝在單殼潛艦上,因為安裝陣列以及配套管線需要較大的空間,只有傳統船型的雙殼潛艦比較適合(外部非耐壓殼較容易開洞與安裝,且耐壓殼與外殼之間的非水密區有足夠空間安裝陣列所需的管套與線路等)。另外,用於長尾鯊號/大鯧鰺級的「微型PUFFS」遷就於核動力潛艦的流線需求,因而變更設計(包括縮小天線或遷入艦體表面),可能也是導致性能不佳的原因之一。 隨後,PUFFS的承包商Sperry在1970年代自行發展出微型PUFFS(MicroPUFFS),以積體電路(IC)等固態電子器件替換先前PUFFS使用的真空管等器件,聽音陣面由3組平面陣列(每組兩個)構成,都嵌入艦殼之中。MicroPUFFS最先被澳洲用來改良該國的奧克斯利級(Oxley class,即從英國購買的妖王級潛艦),之後也被英國引進技術,用於2400型擁護者級(Upholder)潛艦上,英國版型號為Type 2401。
BQQ-1/2/3潛艦用聲納系統 AN/BQQ-1是美國海軍第一種整合式聲納系統,配備在實驗性的白鲑魚號(USS Tullibee SSN-597)核能攻擊潛艦上(1957年簽約,1958年安放龍骨,1960年服役),包含AN/BQS-6球型主/被動陣列聲納以及環繞在球型陣列外的AN/BQR-7適形(conformal)低頻被動陣列聲納 。美國海軍也在1958年啟動「潛艦整合控制」(SUBmarine Integrated Control,SUBIC)系統計畫,透過數位計算機整合艦上所有聲納以及射控處理系統,成為一個全數位化的整合式潛艦戰術指揮處理系統,奠定美國海軍潛艦用整合聲納系統的技術基礎。 AN/BQQ-1的作戰需求(Operational Requirement)在1958年發佈,其探測距離的需求是基於先前的改進型潛艦聲納系統(Submarine Improved Sonar System, SISS)指標;最初SISS的要求是針對較早的飛魚級(Skipjack class)核子攻擊潛艦與拉法葉級(Lafayette lass)彈道飛彈潛艦,包括追蹤距離達30000碼(27432m)以上,對20000碼(18288m)距離上的精確度(誤差)為5%,對10000碼(9144m)距離上的精確度為2%,能滿足潛射反潛火箭(SRBOC)的射控需求。SISS當時還沒有包括利用聲學匯聚效應(Convergence Zone)以及海底反射(bottom bounce)等要求,當時可能的選項是結合AN/BQR-7適形低頻陣列聲納以及一個主動聲納;而BQQ-1/2結合BQR-7以及「海底反射主動聲納系統」(BRASS,見下文)項目開發的球型聲納,遂涵蓋了SISS要求的探測距離以及運用海底反射、深海聲學通道(SOFAR)的能力。 配備於大鯧鰺核能攻擊潛艦與鱘魚級上的AN/BQQ-2整合聲納系統是AN/BQQ-1的後續發展型,除了原本AN/BQR-7被動陣列聲納、BQS-6球型主/被動陣列聲納之外, 還加上前述的AN/BQG-4被動水下射控聲納系統(PUFFS);此外,還有BQA-2水下保密通信系統(Secure Underwater Communications System,SESCO)以及後端的MK-112類比式射控計算機等 。日後改良時,MK-112被半數位化的MK-113魚雷射控系統取代,此外還加裝了TB-16被動式拖曳陣列聲納(見下文) 。 MK-113魚雷射控系統的核心為Librascope公司的MK-130數位電腦,屬於第二代電腦技術(以電晶體取代第一代的真空管),能做到加減乘除以外的邏輯判斷,因而能實作目標動態分析(Target Motion Analysis,TMA,註)的演算法,故首次將過去都要人工作業計算的TMA自動化。MK-130有四個記憶體模組,因此能同時追蹤四個目標的軌跡,並以導向魚雷攻擊其中兩個。 在二戰時代,潛艦的射控作業都仰賴人工作業,射控小組在桌上(通常是官廳餐桌)根據聲納室提供的目標方位資訊以及自身潛艦的方向與速率進行目標動態作業,使潛艦指揮官決定如何接近目標(本身潛艦航向與航速)以及何時發射魚雷。 美國海軍潛艦在二次大戰末期裝備了MK IV魚雷資料計算機(Torpedo Data Computer,TDC),能隨時接收目標的方位與距離資訊(由艦上聲納、潛望鏡以及射控解算人員提供)、我艦本身航向與航速資訊,比對敵我相對空間位置,然後計算出魚雷射擊解算(包括需要輸入魚雷陀螺儀的轉向角G、轉灣半徑、潛艦維持航向與航速時發射魚雷等),傳送到魚雷艙的指示/調節器,魚雷操作人員據此設定魚雷陀螺儀的轉向角度。到了經過GUPPY III改良程序的潛艦,TMA程序引進了MK-101類比式射控計算機,以TDC為基礎進一步增加射控流程的資料整合與自動化程度,成為「射控系統」(FCS,Fire Control System)。 相較於TDC,MK101新增了Mk-7目標分析儀(Target Analyzer),這一種綜合類比電子與機械技術的導航繪圖機,能根據輸入的敵方與我方動態參數,自動描繪出雙方的運動路徑,同時自動追蹤目標。MK-101能自動接收本身潛艦的航向與航速資料,然後由人工輸入三筆目標方位信息(由聲納提供),每個目標參數輸入間隔需達90秒以上,角度相差4.25度以上,以此為基礎再加上一筆目標速率、距離或航向資訊,MK-101計算機就能算出目標航向與速率,並顯示在刻度盤上。後期版本的MK101進一步整合了魚雷控制器相容於新出現的線導魚雷,能將射擊解算轉成信號,透過導線來控制魚雷接近目標直到魚雷本身尋標器的工作距離;如此,過去是靠人工設定魚雷初始參數的流程就被自動化取代,能更加即時、減少人工可能產生的錯誤,同時也可支持線導魚雷。在MK-101的時代,TMA作業仍需要人工計算,將這些目標空間信息手動輸入MK-101,才能進行後續的追蹤與解算;直到MK-113計算機,才將TMA由數位電腦自動化執行,使得潛艦射控作業從取得目標空間資訊(距離、位置、初始航向)到追蹤後續軌跡以及計算武器射控參數,整個流程全面實現自動化。 值得一提的是,經過改良的BQQ-2(改用MK-113數位化計算機等)是美國海軍第一種具備低頻分析和測距(LOw Frequency Analysis and Ranging,LOFAR)(註)與窄頻帶分析能力的潛艦用聲納系統 ,BQR-7也具備甚低頻的LOFAR能力。LOFAR的核心是探測潛艦發出的規律機械噪音(如柴油機、渦輪機),這種聲噪傳播距離遠,且不易因海洋背景雜因而扭曲,因此有機會在很遠的距離外探測,並從背景雜訊中分離出來。 BQQ-2聲納系統配合的第一代LOFAR/DEMON設備是BQQ-3頻譜分析器,將LOFAR窄頻分析的結果列印在紙帶上。後期型BQS-2後端增加了陰極射線管(CRT)顯示器,透過類似雷達圖的方式顯示自身、目標以及魚雷的位置與航向,首次能夠呈現在視覺上呈現即時的戰場動態給潛艦指揮官。
長尾鯊號(USS Thresher SSN-593)核能攻擊潛艦的被動聲納顯控台, 由左而又是BQG-1被動水下射控聲納系統(PUFFS)的顯控台、 BQR-7被動陣列聲納顯控台(方向盤是用來控制被動陣列 波束方向)、BQQ-3 LOFAR頻譜分析器的紙袋輸出終端。 AN/BQR-7艦首適形被動陣列聲納 AN/BQR-7的聲納陣列由156個聽音器單元,由52 x 3的方式排列,圍繞在艦首形成一個馬蹄形陣列,是美國海軍早期的適形陣列(配合潛艦外型)聲納系統。 最早期的型號使用類比信號處理(波束成形等)技術。BQR-7陣列口徑比BQR-6球型陣列還大,所以操作頻率更低,操作頻率下限達到150Hz ,探測距離至少達第一匯聚區(約25海里),在有利的海底聲學聲道狀況下,能接收到100海里外的聲學訊號。BQR-7以類比波束成形方式產生兩個接收波束,一個在270度方位內持續來回掃描,探測結果分析結果列印到連續紙帶上 ,另一個由聲納人員控制來追蹤特定目標(由顯控台的方向盤來控制指向)。 BQR-7結合BQQ-3 LOFAR頻譜分析器,能從極低頻聲學信號中鎖定特定目標的噪信,使得BQR-7的探測距離大幅增加。1965年推出的BQR-7A則改用數位化的信號處理技術,可將結果輸出到顯示器上。 隨著1970年代後期蘇聯潛艦靜音化、寬頻機械噪音日漸降低之後,美國海軍越來越倚重AN/BQR-7這類低頻聲納來接收並分析螺旋槳的窄頻信號,識別目標的種類。 裝備於鱘魚級的改良型BQQ-2聲納系統開始具有LOFAR分析能力。1970年代推出的BQQ-3基本上是將BQQ-2數位化的版本,大鯧鰺級、早期鱘魚級的BQQ-2後來都升級為BQQ-3。 早期配合AN/BQS-1/2/3聲納系統時,AN/BQS-7適形陣列聲納是直接安裝在艦首鋼質聲納罩內側;而AN/BQQ-5開始就改用玻璃纖維艦首聲納外罩,無法支撐BQS-7陣列,解決方法是在球型陣列聲納外部另外增加一圈支架來安裝BQS-7的陣列。 AN/BQS-6艦首球型陣列聲納 BQS-6源於1950年代中期美國海軍展開的「海底反射主動聲納系統」(BRASS,Bottom Reflection Active Sonar System)項目,要求此系統的拍發波束能控制水平與垂直指向(以往主動聲納只具備水平指向),使其能往上朝海面或向下朝海底拍發,透過海面/海底反射方式來增加工作距離;此外,波束具備垂直指向能力,也有助於捕捉能快速垂直向機動的核子潛艦。BRASS初期的構想是設置兩個半球陣列,分別安裝在艦首魚雷管上方與下方;後來決定將兩者合成一個大的球型陣列,完全佔據艦首空間;為此,魚雷管被移到陣列後方,以協向方式布置在艦首兩側。在1958年,美國選擇雷松(Raytheon)為BRASS主承包商並簽署合約,設計並製造兩個原型聲納,正式型號就是AN/BQS-6。 BQS-6是全世界第一種潛艦用球型陣列聲納,直徑約15英尺(4.57m)的巨大音鼓佔滿潛艦的艦首。此種設計能讓聲納音鼓的尺寸達到 艦內所容許的最大值,獲致更遠的偵測距離 ;此外,球型聲納陣列有利於精確地合成與接收各種波束。球型音鼓陣面上各個水聲單元組件到球心等距,可在水平與垂直方位任意合成波束,而且任何角度的波束都不 會產生畸變;而傳統柱型陣列上的組件,在垂直向並非與中心等距,偏離中心軸線的波束比水平的波束更寬,需要靠更複雜的方式來處理。因此,球型陣列聲納賦予美國核能攻 擊潛艦很廣泛的水平與垂直向聲納搜索範圍,能更自由地偷偷接近缺乏拖曳陣列聲納、在艦尾留下70至90度偵測盲區的早期蘇聯潛艦 。1950年代後期美國海軍測試當時BQR-4/SQS-4等圓柱型陣列聲納的效能時,就發現高速航行的核子潛艇進入聲納探測範圍之後,經常在潛艦來得及完成射控計算並發射武器之前就能脫離聲納探測範圍,而BQS-6球型陣列聲納擁有更廣的涵蓋面,能在更大範圍內於三度空間追蹤水下目標。BQS-6具備以海底反 射操作模式下提供精確射控等級偵測的能力,並能在直接通道到第一匯聚區的範圍提供可靠的射控能力。 安裝球型陣列聲納的艦首區域是非水密區,球型陣列聲納後方是耐壓水密艙區的起點;此外,球型陣列聲納艙的上部會設置一個「眉板」,用來遮蔽從上方海水表面傳來的噪信,這是為了減少潛艦自身噪音傳到海水表面之後反射回來干擾球型聲納 球型聲納對於聲納偵測效能而言堪稱是最佳化設計,不過球型聲納陣列生產成本很高,需要使用精密電腦控制、動用複雜的五軸切割機才能製造球型音鼓;此外, 由於球型陣列聲納佔滿了艦首空間,導致魚雷管必須設置於聲納室後方,朝著艦首外側傾斜 ,使得這個部位的壓力殼需要開好幾個橢圓形的孔,技術難度高;此外,帶有傾斜角度的魚雷管發射時,潛艦航速的限制較大,只能在較低的航速才能打開魚雷管外門並發射武器 (早期必須在10節以下,洛杉磯級的改進設計則放寬到18節以下);而從傾斜的魚雷管發射後,魚雷導線承受較大的水流側向剪力,被弄斷的可能性較大。權衡利弊,美國海軍認為潛艦在遂行反潛作戰或伏擊水面艦隊時,首重於本身的靜音能力,才能在敵人 未察覺的情況下逼近並開火,因此潛艦是否能在高速時發射武器就顯得沒那麼重要;因此,美國的核能潛艦從長尾鯊級開始,全部都配置球型的艦首聲納系統 。 長期以來,球型陣列聲納都是美國核能潛艦的專利;俄羅斯直到1990年代開工建造的最新型Project 885核子動力攻擊潛艦(由於經費短缺,1993年開工建造的首艘本級艦直到2010年才下水,2013年服役),才首度引進艦首球型聲納設計,顯示技術有所突破。 BQQ-2裝備於大鯧鰺、鱘魚級等核能攻擊潛艦上,但後來被BQQ-5取代。
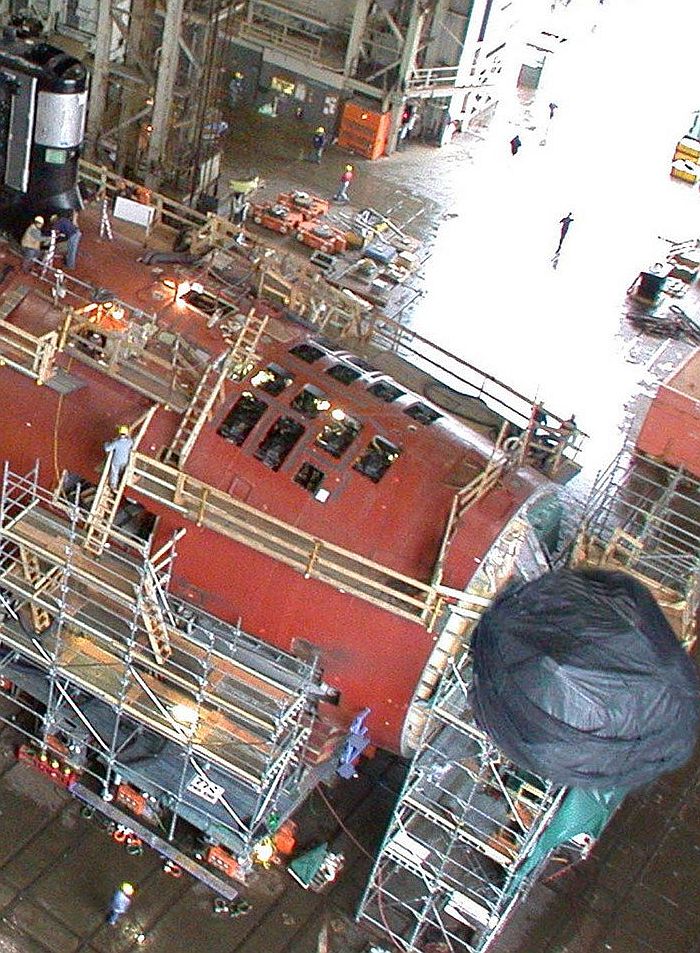
大鯧鰺級核能攻擊潛艦大鯧鰺號(USS Permit SSN-594)正在安裝AN/BQS-6艦首球型 陣列聲納。攝於1961年3月19日梅爾島海軍造船廠(Mare Island Naval Shipyard)
BQS-6的主要工作模式頻率在1KHz以上,屬於中頻,但其最低工作頻率達到0.5KHz,達到低頻聲納的範圍內。BQS-6採用類比式(機械式)波束成形,聲納波束是由直徑15公尺的外部大球陣列內的三個子陣列(補償器,compensator)負責,分別裝在三個球狀結構中;每個球型子陣列直徑是外部大球的1/10,子陣列內部有機械式的換向器(commutator)來旋轉,通過機械旋轉到不同角度來控制被動接收波束的指向。聲納主陣列(外部大球)上布置1241個接收聲波的水聲換能器(transducer),每個換能器都有線路分別連接到三個內部球型子陣表面上相對應的位置。這三個子陣列中,一個用來接收主動聲納的回波,另一個負責純被動模式、產生可轉向的追蹤被動接收波束(steerable tracker beam),而第三個負責BDI精確側向、掃描並將資料輸入方位-時間記錄器(Bearing‐Time‐Record,BTR)。而被動聽音的水聲換能器(transducer)安裝在大型球陣外部,並且用線路連接到內部三個。主動聲納經由另一套「交換網路」(Switching Network)傳送能量與控制波束,可以全向拍發,或是以緊鄰的三道寬波束(每個6度)來發射。BQS-6是美國海軍使用過最複雜,也是最後一種類比式波束成形聲納系統。
長尾鯊號(USS Thresher SSN-593)的BQS-6球型陣列聲納顯控台,由左而又 三個區域分別是被動功能顯控台(方向盤是用來控制被動波束方向)、主動 功能顯控台(倒三角型為SSI,圓形為PPI)以及一個BQA-3圖形指示器。 BQS-6球型聲納系統後端顯控台包括主動與被動模式顯控台,以及一個BQA-3圖形指示器(用來測量回波的都卜勒效應),這些都是類比式設備。BQS-6的被動聽音結果由一個放大掃描器(amplifier-scanner)形成波束,並顯示在方形的被動模式顯示器上,操作人員由一個方向盤手動控制被動聲納方向;而主動聲納接收器則處理聲納影響,從中擷取主動拍發的回波,並輸入主動顯控台以及BQA-3圖形指示器。此外,主動顯控台也能從獨立的接收掃描器(receiver-scanner)接收主動拍發的回波。主動聲納顯控台上前方面板有兩個示波器,左側為區段掃描指示器(Sector-Scan Indicator,SSI,倒三角形),右側是圓形的PPI顯示器,兩個顯示器可讓操作人員比較左側與右側的波束並進行精密測量,以及可分析聲下壓(depression)/上升(elevation)角度;而主PPI顯示器上方還有兩個指示器,分別是指向性以及下壓/上升指示器,用來顯示單一拍發、筆狀波束(single-ping pencil-beam)的回波。 日後BQS-6升級為更新型的BQS-11/12/13聲納時(在大鯧鰺級上是第三階段改裝,Retrofit III),增加了一個新的主動聲納接收器(位於先前BQS-2的接收掃描器上)。經Retrofit III升級(BQS-11/13)後,前述主動顯控台上的四個SSI/PPI顯示器都移到下層面板,被兩個陰極射線管(CRT)顯示器取代,其中下方的CRT直徑較大,用於A-scan,而上方的CRT直徑較小,用於顯示主動模式。由於BQS-11/13是自動追蹤,因此就不再設置SSI顯示器。對於BQS-11、12,主動聲納的接收信號可選擇顯示在原本的BQA-3圖形指示器,或經由新設置的數位資料電腦/處理器處理,顯示在新增的輔助主動顯控台(auxiliary active console)上;而更新型的BQS-13系統則完全取消BQA-3圖形指示器的顯示器與電子機櫃,主動聲納信號一律送至資料電腦/處理器並顯示在輔助主動顯控台上。此外,BQS-12聲納也更改了被動聲納顯控台介面,取消了原本的方向盤 。BQS-11/12/13由位於羅德島州朴次茅茲的雷松潛艦信號部門(Raytheon Submarine Signal Division, Portsmouth, Rhode Island)製造。 AN/BQR-15潛艦用拖曳陣列聲納 在1950年代末期至1960年代初,美國切薩皮克設備公司(Chesapeake Instrument Company)首次嘗試 使用拖曳式的線性聽音列陣來接收海洋中的低頻地震回波,以尋找海底石油 來源,參與的石油業主包括西方石油公司(Occidental Petroleum)。此系統的聽音頻率極低,一般在120Hz以下,唯有線性拖曳陣列才能構成足夠的孔徑來接收。使用時,美國發現這種線性被動拖曳陣列能在遙遠距離截 獲潛艦發出的低頻噪音,遂引起美國軍方高度興趣。隨後,美國海軍於1960年代初期在青花魚號(USS Albacore AGSS-569)實驗潛艦以及一艘核子動力彈道飛彈潛艦上測試潛艦用拖曳陣列聲納;貝爾電話實驗室(Bell Telephone laboratories)在1961年製造了實驗性的潛艦拖曳聲納,由一艘核子動力彈道飛彈潛艦進行測試。 在1960年代,美國海軍彈道飛彈潛艦(SSBN)社群希望能改善艦尾音擋盲區的探測能力(避免遭到敵方潛艦跟蹤)以及加強水下目標辨識能力,美國海軍在1965年啟動一項可行性研究,設計用於核子攻擊潛艦(SSN)與彈道飛彈潛艦的拖曳陣列聲納;當時美國海軍雖然已經開始嘗試在水面船隻上部署拖曳陣列聲納,但相關技術尚未成熟。 最初的潛艦拖曳陣列聲納在艾森.阿倫級彈道飛彈潛艦約翰.馬歇爾號(USS John Marshall SSBN-611)上測試,確認拖曳陣列能遠離潛艦自噪的干擾得到更乾淨的聲學信號。基於初期測試的成功,美國海軍決定為為彈道飛彈發展專門的低自噪拖曳陣列聲納。 隨後,美國海軍就開始發展專為彈道飛彈潛艦優化的AN/BQR-15,選擇西方電器(Western Electric Company)為主承包商,次承包商包括AT&T,發展合約2000萬美元,開發工作在1972年完成。 對於水下的潛艦而言,回收拖曳陣列的風險比水面艦更高;因為潛艦拖曳陣列施放時非常靠近艦尾的螺旋槳推進器,拖曳陣列纏入推進器的風險大得多。 BQR-1分為四個主要部件,包括波束成形器(beam-former)、拖曳陣列總成(towed array assembly)、收放處理裝備以及顯示控制裝備。 AN/BQR-15 HF的拖曳陣列由一條長670m(2200英尺)的拖纜以及一個長47m(156英尺)、直徑3.5吋(約9cm)的拖曳陣列構成,拖曳陣列上總共有42個水聲接收器(hydrophones)。 波束成形系統能形成46個固定指向(bearing)的波束,加上兩個可控制指向的類比(steerable analog beams)波束,兩個可控制波束能涵蓋23個方位之一;此外,系統 也能形成波束指向92個方位。為了降低自噪,整條陣列都使用柔性構造,在理想狀態下最快能在15分鐘內部署完畢。波束成形器將資料匯入一個頻率分析器(frequency analyzer),使聲納人員根據聽音陣列獲得的聲學信號頻率來識別目標。 聽音陣列設計能將潛艦自身機械噪音(主要在低頻領域)降至最低,這是相對於潛艦艦體聲納的最大優勢。 AN/BQR-15的初始計畫是生產26套,包括裝備於艦隊彈道飛彈潛艦(Fleet Ballistic Missile,FBM)以及作為備料存放在新倫敦(New London)、查爾斯頓(Charleston)、珍珠港等彈道飛彈潛艦基地設施。 至1974年5月,共有四艘彈道飛彈潛艦裝備了AN/BQR-15,分別是班哲明.富蘭克林級(Benjamin Franklin class)的USS Mariano G. Vallejo (SSBN-658)與威爾.羅傑號(USS Will Rogers SSBN-659)以及艾森.阿倫級(Ethan Allen class)的山姆.休士頓號(USS Sam Houston SSBN-609)與湯馬斯.愛迪生號(USS Thomas A. Edison SSBN-610)。1975財年預算則涵蓋涵蓋艾森.阿倫號(USS Ethan Allen SSBN-608),麥迪遜級(James Madison class)的特庫姆賽號(USS Tecumseh SSBN-628)、約翰.卡爾霍恩號(USS John C. Calhoun SSBN-630)、尤利西斯·格蘭特號(USS Ulysses S. Grant SSBN-631)、馮.斯圖本號(USS Von Steuben SSBN-632),以及班哲明.富蘭克林級的法蘭西斯·史考特·基 號(USS Francis Scott Key SSBN-657)。在1976財年,美國海軍編列1660萬美元預算來完成26套AN/BQR-15的採辦,以及購置其他訓練用組件。 在1972年,美國海軍頒佈合約來發展信號處理與顯示系統(Signal Processing and Display,SPAD),以提升BQR-15的作業效能,進一步發揮其性能潛力;然而,SPAD發展作業發生延遲與技術困難,在1974年3月取消,原經費則轉移到多頻道信號處理裝備(multiple-channel signal processing equipment)。在1974年,美國海軍授出AN/BQR-23聲納信號處理器合約,這是專為BQR-15開發的信號處理器。AN/BQR-23能支持至少同步實時處理62個LOFAR頻道,並具備方位內插(bearing-interpolation)追蹤器來對資料進行平滑化(smooth)處理,並提供LOFAR以及頻率方位(frequency-azimuth)的聲納資料顯示格式。 在1980年代,美國推動戰略投射改動(Strategic Projects Alterations,SPALTs)計畫,其中包括在裝備三叉戟潛射彈道飛彈的新造俄亥俄級潛艦上裝備AN/BQR-15聲納;與先前的版本相較,俄亥俄級的AN/BQR-15做了不少改良,包括引進9080「細線型」(thin-line)拖曳陣列,以及新的數位信號處理器,能提供高解析度的目標探測能力,並允許更高的拖曳作業速率。9080細線陣列的直徑從原本3.5吋大幅降至1吋(約3cm)左右,使得陣列總長度得以增加,同時也降低了自噪,提供更好的特測效能。9080細線聽音陣列的接收通道信號也完全數位化,並多路復用(multiplexed)到纜線中央的同軸電纜信號通道(coaxial signal path)連接到艦上的信號處理裝備。9080細線聲納以洛克威爾(Rockwell )的AN/BQQ-9數位化拖曳陣列信號處理裝備(Towed-Array Signal Processing Equipment,TASPE)取代原本的AN/BQR-23類比信號處理器。 BQQ-5潛艦用聲納系統
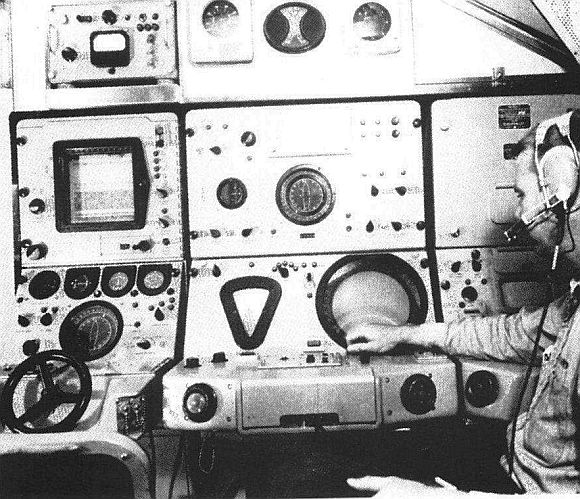
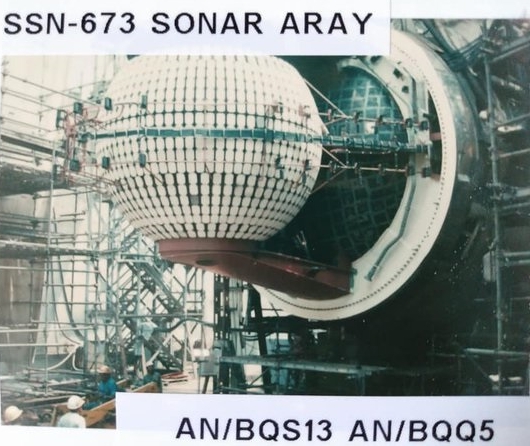
一艘美國核能攻擊潛艦的AN/BQQ-5整合聲納系統的顯控台。與上圖AN/BQQ-2的 後端顯控台相較,全數位化的AN/BQQ-5都採用CRT顯示器的顯控台,而沒有 PPI、SSI等類比示波器。 BQQ-5是繼BQQ-3之後的美軍新一代潛艦整合聲納系統,除了最早的A型外 ,有D/E等改良型。BQQ-5在1972至1973年進行測試,1973年8月開始生產,首先配備於1974年服役的 林普斯康號 (USS Glenard P. Lipscomb SSN-685)核能攻擊潛艦上,隨後裝備於 最後九艘改良型鱘魚級核能攻擊潛艦以及隨後的洛杉磯級核能攻擊潛艦上,隨後早期型鱘魚級與大鯧鰺在接受改良時都以BQQ-5取代BQQ-2。 BQQ-5的主承包商包括IBM(International Business Machines Corporation)、雷松(Raytheon)、古爾德(Gould lncorporation)和班迪克斯公司(Bendix Corporation)等。 AN/BQQ-5是美國海軍第一種全數位化聲納系統 ,相較於先前AN/BQQ-2/3最大的區別是以數位多聲波操控模式(Digital Multi-Beam Steering,DIMUS,即數位波束成形)取代先前的類比式波束成形,包括聲納信號處理或資料處理都實現數位化。BQQ-5配合具備低頻分析測距(LOFAR)能力的TB-16拖曳陣列聲納,使美國海軍核能攻擊潛艦擁有了 以窄頻數據分析而為每一艘個別蘇離潛艦建立聲紋識別資料的能力。BQQ-5是一種數位化聲納系統,DIMUS模式下由多個數位處理器分別處理各不同聲納音鼓接收的信號,傳輸給UYK-7電腦進行追蹤處理與顯示;而追蹤軟體則根據聲納 回傳的聲學信號、比較信號的變化,自動進行目標動態分析(TMA), 進而在螢幕上獲得較平滑的目標軌跡,這種技術使得BQQ-5成為全世界第一種追蹤品質接近雷達的潛艦用聲納。 由於使用數位化技術,BQQ-5聲納系統的內部聲噪遠比先前機械式的AN/BQQ-2少(BQQ-2仍需要使用機械式開關), 且後端電子系統佔用的體積與重量比前代AN/BQQ─2大幅減低。憑藉著全數位化信號處理技術,AN/BQQ-5融合艦上所有各種不同聲納陣列接收的資料,包括艦首球型陣列聲納、適型陣列聲納、拖曳陣列聲納等,形成一個從艦首到艦尾與整個拖曳陣列長度、涵蓋全方位的單一巨大聲納孔徑,擁有絕佳的探測效能。 BQQ-5聲納系統的後端 結合MK-117數位化聲納指揮射控系統,,這是美國海軍第一種全數位化的潛艦射控系統,可說是為了配合BQQ-5而誕生。 之前MK-113「半數位化」射控系統中,除了處理TMA運算由MK-130數位電腦負責之外,其他如輸入聲納信號(當時配套的聲納系統都還是類比式,需要靠人工處理各聲納資料)、輸出TMA追蹤參數 以及計算射控解算等環節,都還是傳統類比式;而MK-117因為配套的是數位化的AN/BQQ-5聲納,所以以上的環節流程實現了全數位化。 MK-117將TMA流程(從輸入聲納感測資料到產生追蹤與射控解算資料並輸入武器系統) 完全自動化與數位化,並利用BQQ-5被動模式的多波束控制能力,能同時以被動監聽方式追蹤40個目標,目標處理能力是上一代半數位化的MK-113潛艦射控計算機的兩倍。又,MK-117使用積體電路(IC)技術,整個系統體積重量比起電晶體技術的MK-113大幅縮減。與MK-113相較,MK117以UYK-7電腦取代原本類比式的MK75攻擊指揮儀的工作,並取消了MK-113的兩部類比式轉換器(analog conversion)。MK-117的人機介面是三座用於目標追蹤的MK-81數位顯控台,以及一具用來控制武器發射的MK-92數位攻擊顯控台;MK-92採用數位電路,能控制使用數位化電路的MK-48線導魚雷以及UGM-84魚叉反艦飛彈,但無法控制先前1966年7月服役、使用類比電路的UUM-44潛射反潛火箭(SUBmarine ROCket,SUBROC ,使用核子深水炸彈作為戰鬥部)。MK-117的設計工作在1975財年展開,1977年8月完成測試,而首先裝備的潛艦是1981年7月服役的洛杉磯級達拉斯號(USS Dallas SSN-700),隨後較早服役的洛杉磯級、鱘魚級、大鯧鰺級核能攻擊潛艦也陸續以MK-117取代原有的MK-113。 在1983年,MK-117經過改良,增加為UUM-44A-2潛射反潛火箭進行射控的能力。 BQQ-5由九部聲納系統構成,分別是AN/BQS-11/12/13球形主/被動陣列聲納(後期統一為BQS-13DNA)、AN/BQR- 20/24艦首適型被動測向 聲納、TB-16/23/29被動拖曳陣列聲納、快速被動測距聲納、目標識別聲納、AN/BQS-15探雷與避障聲納、AN/WLR-9A聲納警告器、AN/WQC-5通信聲納與AN/BQN-17回聲測深聲納等 ,以下便分別介紹: 用於鱘魚級核能攻擊潛艦的AN/BQS-13球型陣列聲納,是AN/BQQ-5的一部份。 注意球型陣列外部中間的一圈鋼架是用來安裝AN/BQR-7適形低頻被動陣列 聲納的支架,這是因為BQQ-5聲納改用玻璃纖維製艦首外罩來取代以往的鋼製 外罩,使得BQR-7適形陣列無法再像過去一樣安裝在鋼質聲納罩內側。
1.BQS -13艦首球型陣列聲納 :這是堪稱BQQ-5最重要的感測系統,由先前AN/BQQ-2型聲納系統中的AN/BQS-6型球型聲納演進而來; BQQ-5以固態電子技術取代先前BQQ-2的機械式系統,發射功率增加到後者的2.6倍;早期BQQ-13只有被動聲納實現數位話,主動聲納仍為類比式波束成形,後來BQS-13DNA也將主動聲納改為數位波束成形(取代原本BQQ-2的機械旋轉系統),使主動波束掃描的速率大幅提升。 最初先是由AN/BQS-6A與6B分別發展出AN/BQS-11與12 型,雷松潛艦信號部門(Submarine Signal Division)以此為基礎開發出AN/BQS-13型, 首先用來換裝鱘魚級核能攻擊潛艦。在1971年底,IBM、雷松潛艦信號部門合作對AN/BQS-13進行進一步改良,包括提高聲納探測能力、可靠性、可 維修性, 以及後端系統的數位化與電腦化程度,改進後的型號為AN/BQS-13DNA,DNA代表「數位化多波束寬/窄頻加速主動搜索聲納」 (D:數位化,N:可選擇寬/窄頻信號處理,A:加速主動探測技術) 。配合BQS-13球狀陣列,原本美國海軍使用的鋼製艦首聲納罩改成玻璃纖維製造,外面包覆一層橡膠。 BQS-13DNA是全世界第一種發射、接收端信號與資料處理都實現數位化的聲納系統,具有窄帶寬帶雙檢測頻道,大大提高了深海大深度下的主動聲納搜索 效率。BQS-13DNA的聲納接收、信號處理、顯示、電腦由雷松潛艦信號研發,而 聲納陣列的換能器則由漢緯(Honeywell lnc)開發。 BQS-13DNA的主要功用是以主動拍發方式對水下目標進行定位,後端電腦計算出目標距離、方位和深度等資訊後,便輸入MK-ll7型射控系統, 作為MK-48魚雷、魚叉反艦飛彈等武器的射控資料;而與AN/WQC-5水下通信聲納結合時,則可利用BQS-13DNA的球型音鼓進行水下通信。 平時BQS-13DNA只以主動方式工作,然而如果艦上專門的被動聲納(如AN/BQB-20或被動拖曳陣列聲納等)失效時,才利用BQS-13DNA進 行被動監聽 。AN/BQS-13DNA廣泛使用數位化控制,包括聲納的多波束成形、寬窄頻帶信號處理、聲納發射控制、信號調節和集中顯示等功能,因此性能靈敏而良 好;系統配備四個顯控台,每個顯控台裝有一個30個按鈕的面板,能指揮運用720個系統指令;而後端軟體則撰寫了30000條指令。AN/BQS-13大 量使用固體電路組件、整合電路以及採用模組化結構的標準組件,具有體積小、重量輕、容量大、工作穩定可靠、工作壽命長等優點,而且便於日後的功能擴充。 AN/BQS-13的控制電腦也具有自我檢測功能,能及時指示發生故障的部位,並可現場立即維修抽換,大幅增加了可維修性。AN/BQS-13DNA也預 留許多資料傳輸接口,能與其他聲納系統的後端結合,進行共同運用與資料交換。 AN/BQS-13DNA的球型音鼓直徑與前一代的AN/BQS-6相同,約為15英尺(4.57m),安裝於艦首壓 力殼外部,以降低艦體內部噪音的干擾,聲納陣列由1241具換能器構成 (與BQS-6、11、12仍相同),信號處理器為CV-3011(主動信號) 與CV-3010(被動信號)。在主動工作模式下,AN/BQS-13DNA的工作頻率為3.5KHz,波束俯仰範圍-15~+45度, 連續發射功率高於75KW;採用被動模式時,聽音頻率為1~3KHz,俯仰範圍-52~+36度;波束俯角大於仰角,在於充分應用海底反射匯聚區的特性。 AN/BQS-13DNA能同時產生600道波束,同時分佈在60個水平方位。AN/BQS-13DNA可利用三種傳播模式來探測目標:利用表面反射模式 時,偵測距離 10~15海里(18.2~27.4km);利用海底一次反射模式時,偵測距離高於15海里;利用深海一次匯聚區效應時,真測距離為30至35海里 (54.8~64km) ;而利用深海聲道彙聚區效應時,BQS-13最大探測距離可達90km以上。 2. AN/BQR- 20/24被動測向 聲納:這是一部低頻被動偵測聲納,由美國伊多公司(Edo Corporatio)與雷松公司在先前AN/BQR-7A為基礎發展而來,具有窄頻帶偵測與追蹤低速目標的能力。BQR-20的SHAB適型聲納陣列安 裝在艦首,沿著艦首兩側的半橢圓形部位向左右兩側延伸,呈馬蹄狀,由104個水聲聽音器構成, 分別可在艦首左右兩側產生24道偵測波束以及2道測量自身噪音的波束。此型聲納採用積體電路元件,具有數位化控制的多波束能力、窄頻偵測、追蹤和識別能 力、數位化信號處理、 真時頻譜分析等先進能力,,基於各感測器截收的特定窄頻信號進行頻率線性整合追蹤(Frequency Line Integration Tracking,FLIT),並使用都卜勒頻移原理(Doppler principle),操作時可用自動控制或人工控制兩種方式進行追蹤,聽音頻帶範圍0.4~1.4kHz,偵測距離可達25~50海里 (46~91km)。此一聲納主要用於監視以及遠程警戒 ,並協助進行射控解算;由於採用波長較長、鑑別度較差的低頻操作,所以方位測定精度相對較差,無法分辨俯仰角,而且聽音範圍只能涵蓋艦首前半球。 3.TB-16拖曳陣列聲納:在1972年,美國西方電氣公司(Western Electric Company)開發出彈道飛彈潛艦使用的AN/BQR-15拖曳陣列聲納之後,緊接著又研發核子攻擊潛艦使用的TB-12(後來改為TB-16)拖曳陣列聲納,並在1974年5月首度安裝於首艘洛杉磯級核能攻擊潛艦上進行測試,此後便成為AN/BQQ-5聲納系統的一部份。此套拖曳陣列聲納由TB-16型水下拖曳聽音陣列、拖曳纜繩、收放絞車與後端處理控制設備組成,聽音陣列透過拖曳纜繩從潛艦尾部水 平翼尖端的管口施放入海中。 由於當時已服役或正在建造的美國潛艦內部空間無法容納,早期TB-16遂直接外掛於艦體外;後來發現這種設計在高速運動時容易損壞,所以洛杉磯、鱘魚級 、大鯧鰺在艦體右側加裝一個額外的管狀結構來收容纜線;收放絞車安裝在潛艦的前部壓載水櫃內,絞車上設有緊急剪纜裝置,當潛艦處於危急狀態時能緊急放棄聲 納陣列。拖曳陣列聲納施放在艦尾時,截收到的信號以發送器透過拖纜內的同軸電纜傳送到艦上的電子設備進行處理,並送入MK-117射控系統中。TB-16 主要用於遠程早期偵測與目標分類,並且確保艦尾「檔音區」的安全。TB-16的工作頻率 在3KHz以下,最低可達10~20Hz,有效探測距離高達50至100海里(90~180km),是BQQ-5聲納系統中,作用距離最遠、偵測頻率最低 的感測器;由於是拖曳在艦體後方,故可遠離船艦的自身噪音干擾,並且可以選擇部署的深度,拖曳在與艦體不同的溫層之下,故能避免信號折射,探測到潛艦本身 感測器無法接收的信號;不過,TB-16採用低頻操作,鑑別度差,難以迅速判斷目標的左右方位 。 TB-16聽音基陣由50個接收單元構成,直徑8.25公分 (3.5吋),基陣本身總長度73.15m(240呎),有效孔徑56.7m(186呎),基陣由前端逐漸變粗,至中段再一路變細至後端,以改善流體特 性,減少噪音;至於拖曳基陣用的鋼纜全長約792.5m(2600呎),直徑9.5mm,聽音探測距離大約是潛艦上其他固定式陣列聲納的5倍以上。TB-16拖曳陣列聲納系統的後端採用AN/UYK-20數位電腦作為信號 處理與儲存裝置。施放拖曳陣列聲納時,將影響艦體的操縱與運動能力;根據統計,潛艦向上、向下運動時,拖曳陣列聲納會使航速減少0.5km左右;而拖曳陣 列在拖曳過程中的抗張強度為32 kN(3266 kgf),如果超過就會使纜線斷裂。 雖然日後更新型、偵測距離更遠的TB-23/29拖曳陣列聲納相繼推出,但由於TB-23/29的線性陣列直徑細,在 較高的拖曳速度下,比較容易出現類似彈吉他弦擾動,進而干擾聽音作業,而直徑較粗的TB-16情況則比較好 ;此外,相較於TB-23/29「細線型」拖曳陣列,「粗線型」的TB-16部署作業快速且容易得多, 如果潛艦在沒有事先部署拖曳陣列、臨時戰場情況變化而突然需要時,就可以快速施放TB-16並開始使用。 因此美國從改良型洛杉磯級、海狼級乃至維吉尼 亞級,在配備TB-23/29之餘都繼續保留TB-16, 在較高航速 仍能作業(據信可達10節以上);而在更慢速的戰略情報蒐集、遠距離聲頻分析作業時,才會放出TB-23/29(適合的作業航速約在7節以內)。 美國潛艦為了加快接近目標時間而採取交替的低速傾聽/高速衝刺戰術,在低速階段可以使用較長的TB-23/29拖曳陣列聲納取得較佳的聽音效果,而期間較 高速航行階段則仍能使用TB-16來彌補艦尾盲區。為了適應在較高航速下的拖曳作業,美國進一步改良較早期的TB-16,陣列單元具有更粗更厚實的減震防 護層。 4.快速被動測距聲納:此聲納是1970年代初期美國Sperry陀螺儀公司基於水下被動射控可行性研究計畫(Passive Underwater Firecontrol Feasibility Study,PUFFS)的基礎發展而來,在1975年5月首先裝備於洛杉磯級核能攻擊潛艦的首艦上進行測試。此聲納由兩組線列聽音器陣列組成,分別位於 潛艦兩舷,每組各有三個聽音器基陣,分為艦首陣、中間陣與艦尾陣,沿艇艦體縱向以一定間距排列成一條基線,艦尾陣裝在潛艦尾水平舵的兩側,整個基線長度佔 全艦長度的2/3;基線長度(等效孔徑)決定了定位的精度,基線越長,則定位精度越高。此型聲納的測距原理係以中間陣作為基準點,計算同一聲納信號抵達艦 首陣與艦尾陣的時間差,再根據基線長度,就能計算出目標方位和距離。 此一測距聲納具有數位計算機,能瞬時或連續提供目標資訊(距離、方位等)給MK-117聲納指揮系統。此種測距聲納接收頻率約2.8KHz,可在艦體兩側 45x135度的扇面內對水下目標進行測距,方位測量精度約為正負0.2度,探測距離約10海里(18.25km),能大致滿足魚雷射控的需求。 此種聲納基陣係貼附在艦殼外部不佔用艦內空間,並採用泡沫合成橡膠聲障板與艦體隔開,以降低受到潛艦自身噪音的干擾。此一測距聲納的最大優勢在於陣列基線 長,因此不需要發出足以暴露自身方位的主動聲納訊號,或者如傳統被動聲納般仰賴艦體移動, 就能大致提供魚雷射控所需的目標資訊;然而此系統的制也不少,首先是其方位精度取決於各聽音基陣安裝的精確度以及服役期間保持的精確程度,而各聽音基陣之 間的相對位置也難以完全精確地測量;此外,此一聲納雖然與艦體之間採用橡膠聲障板隔絕,然而實際效果卻不如預期,潛艦本身噪音仍嚴重影響了測距性能。雖然 如此,由於此型長基線測距聲納能幫助被動拖曳陣列聲納判斷目標的左右方位,並完成對水下目標的被動測距,所以仍是艦上重要的感測裝備。 5.目標識別聲納:此聲納系統本身的專用陣列位於帆罩上,此外還共用AN/BQS-13DNA的球型陣面與AN/BQR-20的適形陣列,輸入各聲納陣列接收的目標信號來轉換成分析頻譜,透過電腦比對資料庫中儲存的既有目標特定頻譜,自動識別出目標類型。
停泊在格魯頓基地的洛杉磯級阿爾伯基克號(USS Albuquerque SSN-706), 帆罩前端上部的外罩卸除,露出AN/BQS-15冰下/偵雷聲納的音鼓。攝於1995年 6.AN/BQS-15探雷與避障聲納:此聲納由Ametek lncorporation公司研製,從1974年開始裝備於新造的洛杉磯級核能攻擊潛艦上,設置於帆罩前端。此聲納採用超高頻工作,專門用於探測潛艦附近的水域,檢查是 否有障礙物或水雷的存在,以保證潛艦航行的安全。AN/BQS-15由DT-365聽音器、TR-215與TR-217換能器及OD-84顯控台構成。在 1980年,為了進一步提高探測水雷與避障能力,又研發了新的波束形成器和信號處理器設備,在1985年完成。 7.AN/WLR-9A聲納警告器:主要工作是接收敵方主動聲納或魚雷主動尋標器的參數(方位、發射頻率、脈衝寬度、脈衝回復率等),其專屬聽音器陣列安 裝於艦首與帆罩上,並且能共用艦上的BQS-13DNA球型陣、BQR-20適形陣、拖曳陣列與被動測距陣列;除了警告艦上人員遭受攻擊、採取迴避措施 外,並取得敵方聲納參數作為干擾措施的依據。WLR-9的工作頻段涵蓋 1~1000kHz,偵測距離高達50海里以上。 8.AN/WQC-5通信聲納:作為水下通信之用,通常以BQS-13DNA的球型陣列當作收發陣列,如進行超遠距離通信時則還可利用拖曳陣列聲納當作接收器。 WQC-5本身還有專用陣列,安裝於帆照內,用於和己方潛艦或水面艦之間的喊話,確保之間的協同作戰與指揮工作;不過這個專用陣的功率與使用距離不大,平常並不使用。 9.AN/BQN-17回聲測深聲納:此一聲納由雷松公司研製,在1972至1973年進行一系列海上測試;第一台原型於1976年完成,裝備於首艘洛杉 磯級核能攻擊潛艦上。此聲納的主要功能,是供潛艦在深海和淺海中潛航時,在可靠深度上進行深度測量所用。在1980年,美海軍電子系統指揮部(Naval Electronic Systems Command)把高度可靠的標準電子組件引入此型聲納,此種標準電子組件每工作1萬小時僅有0.05%的故障率。 從洛杉磯級的達拉斯號(USS Dallas SSN-700)開始,BQQ-5增加了可操控的艦體陣列波束成形(Steerable Hull-Array Beamformer ,SHAB)。AN/BQQ-5C增加了指向頻率分析與紀錄(Directional Frequency Analysis and Recording,DIFAR)能力,這是透過後端三部AN/UYK-44中型電腦完成。洛杉磯級的鹽湖城號(USS Salt Lake City SSN-716)首次裝備AN/BQQ-5C,日後AN/BQQ-5A/B也陸續升級到AN/BQQ-5C的水平。 改良後的BQQ-5D上用於海狼級、改良型洛杉磯級(688-I)與鱘魚級 上。BQQ-5D更新了波束塑形與訊號處理電腦,以提高波束指向能力與目標偵測的正確性;聲納次系統部分, 將原本艦首兩側BQR-20的適型陣列聲納換成三條線性陣列聲納,能形成更多的波束,此外還增加新型TB-23「細線版」拖曳陣列聲納。TB-23採用先進的科技, 目標是提供四倍於TB-16的聲納孔徑,聲納陣列由98個聽音單元構成,長度305m,直徑僅1.1~1.2吋(約2.9cm),拖曳在一條長914m(1000呎)的光纖纜線後。「細線型」陣列要要使用比以往更細的纜繩,長度比以往長得多;如何讓細線 在收放與拖曳部署過程中不纏在一起,以及在海水中拖曳時承受巨大阻力、張力而不斷裂, 對於纜繩材料的挑戰性極高,難度遠高出陣列上水聽器。TB-23的測試結果未如理想,所以美國海軍 遂以洛馬研發的TB-29取而代之。 TB-29一開始的編號為TB-12X,意即「孔徑12倍於TB-16」;早期的TB-29總共串連了13組聽音陣列,每個陣列 長48.8m,由32組聽音單元構成(因此總共有416個單元),直徑1.9吋,總長度高達634m,甚至比拖曳用的纜線(580m或1902呎)還長 ;而之後進一步改良的TB-29A的聽音陣列進一步加長至825m。由於TB-29A是如此之長,不同的聽音陣列能直接以三角定位方式準確測量目標距離,聽音距離是TB-23的四至五倍。 由於TB-29A直徑細,佔用空間較小,因此整套系統與纜線收容於潛艦壓力殼內,不像先前TB-16需要在艦體外部增設一個收容管。 經過ARCI信號處理技術的提升,TB-29A的性能接近上一代的拖曳式感應監視聽音系統(SURTASS)。美國海軍T-AGOS音響探測船的AN/UQQ-2 SURTASS系統,一開始就由兩條TB-29A構成聽音陣列,總長度高達1500m。 隨著俄羅斯潛艦日益靜音化,在低速時的推進器幾乎沒有空蝕噪音,可能被偵測的信號除了反應器冷卻迴路、空調系統與液壓操舵系統之外,連續噪音幾乎只剩車葉運轉的甚低頻噪音,因此TB-29這樣長基陣、低頻的拖曳陣列聲納就更顯重要。 2000年代以後,隨著TB-29逐漸被廣泛部署在美國海軍核能攻擊潛艦上,在背景雜訊干擾嚴重的淺水域(例如鄰近中國的東海、南海等)的偵測能力遂大幅增加 ,而對於日趨靜音化的敵方潛艦(例如俄羅斯新型核能潛艦)的偵測效能也有改善。 不過如同前述,配備TB-23/29等更長的「細線拖曳聲納」時,美國潛艦仍保留較短而粗的TB-16,用於較高航速下的作業。
建造中的海狼級潛艦的艦首球型陣列聲納。與先前AN/BQS-6以及AN/BQS-13 接收/發射陣列合一的設計不同,海狼級的主動發射、被動接收陣列各自分開, 上方的大型球體是直徑高達24英尺的大型球狀陣列(LSA),下方半球體是 主動半球陣列(AHA)。 海狼級的艦首球型陣列聲納與先前的AN/BQS-13不同,是1980年代美國海軍水下系統中心(NUSC)研發的新一代產品。先前的AN/BQS-6以及AN/BQS-13球型陣列,都採用發射/接收陣列整合為一的構型;而為海狼級開發的新陣列,採用發射陣列與接收陣列分離的設計,這使得只需接收的被動聽音陣列尺寸能進一步放大。先前AN/BQS-6、AN/BQS-13的球型陣列直徑約為15英尺(4.57m),而海狼級的被動陣列「大型球型陣列」(Large Spherical Array,LSA) 直徑大幅提高到24英尺(7.315m),有效提高了被動聽音陣列的增益(即靈敏度),顯著改善低頻接收能力;由於靈敏度提高,接收單元再也不需要通過主動聲納拍發的高功率脈衝拍發(ping)信號。海狼級的獨立式主動聲納陣列為半球型,稱為「主動半球陣列」(AHA,Active Hemispherical Array),安裝在被動大型球狀陣列(LSA)下方。 相較於先前AN/BQS-13主動聲納與被動聲納共用整個球狀陣列,海狼級的AHA口徑變小,所以主動拍發的波束變寬。這並不會影響主動陣列的精確度(因為負責接收回波的LSA口徑很大,接收波束很窄),不過拍發波束變寬會傳遞到較廣的方位,被目標以外其他敵方單位聽到的機率增加;雖然如此,由於潛艦極少使用主動聲納,且美軍潛艦被動聽音能力精良完善,往往不需要最後的主動拍發確認就能得到足夠精確的目標方位與動態解算,所以權衡利弊在實用上影響不大。 BQQ-5最新的改良是1998年完成的BQQ-5E,搭配CCS MK-2作戰控制系統; 除了以TB-29拖曳陣列聲納取代TB-23之外,還加裝TARP被動測距系統,並以UYK-43電腦取代UYK-7。 鱘魚級核能攻擊潛艦除役前都已經將聲納升級到BQQ-5D的水平,洛杉磯級也早已統一為BQQ-5D以上(之後陸續升級為BQQ-5E),而新一代維吉尼亞級核能攻擊潛艦也 使用TB-29拖曳陣列聲納。
BQQ-6潛艦用聲納系統 這 是俄亥俄級彈道飛彈潛艦使用的聲納系統,除了取消BQS-13球型陣列聲納的主動模式之外,其餘都與BQQ-5類似。BQQ-6包含BQS-13球形被動陣列聲納 (包含944個聲學換能器)、BQR-25艦首等角被動陣列聲納TB-16拖曳陣列聲納等。據說BQQ-6在理想探測環境下,最大工作距離可達99英里。 BQQ-6配套的魚雷射控系統是衍生自MK-117的MK-118,這是為俄亥俄級的衍生版 ;相較於MK-117,MK-118取消了幾種武器的運用能力(因為俄亥俄級潛艦只會裝備自衛用魚雷,不會使用戰斧巡航飛彈、潛射反潛火箭等),但進一步提高系統整合度。日後升級時,BQQ-6的配套拖曳陣列聲納換成了TB-29拖曳陣列聲納。
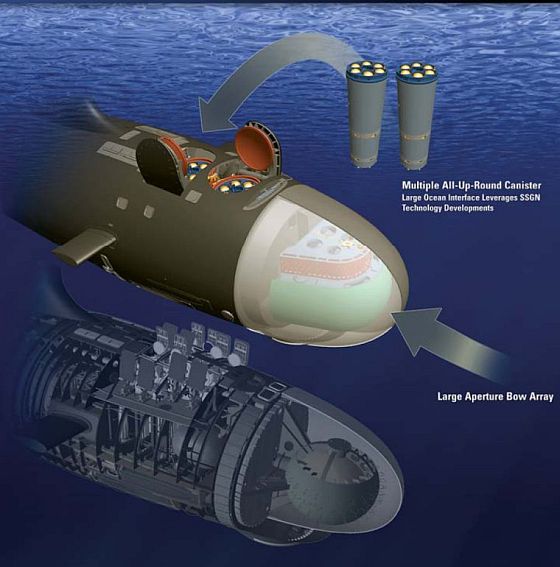
AN/BQQ-10潛艦用聲納系統 1980年代後期,美國海軍開始對AN/BSY-1潛艦戰鬥系統、AN/BQQ-5與AN/BQQ-6聲納系統等進行 四階段的升級轉換,核心是聲學快速插 入套件(Acoustic Rapid Commercial Off-The-Shelf Insertion,A-RCI),改良完成後型號訂為AN/BQQ-10。A-RCI以商規貨 架產品(COTS)、開放式系統架構(Open System Architecture,OSA) 取代原本的軍規硬體架構,使得全系統在壽期生涯中能輕易頻繁地進行軟硬體升級,跟上商業計算機市場的換代速率。以採用新的A-RCI技術的多用途信號處理器(Multi-Purpose Processor,MMP)為例,一個MMP的運算能力就超過美國海軍所有洛杉磯級潛艦上(包含早期型與688-I)舊系統計算能力的總和, 因此能支持引進更複雜的新演算法來改進水下信號處理能力;此外,A-RCI也引進光纖區域網路技術來連結各子系統。AN/BQQ-10 A-RCI首先在1987年裝在洛杉磯級的奧古斯特號(USS Augusta SSN-710)進行測試,一同整合的還包括BQG-5D寬孔徑被動陣列聲納(Wide Aperture Array,WAA);這些技術日後逐漸普及應用於洛杉磯級、海狼級核能攻擊潛艦上。到2010年代後期, 海狼級、俄亥俄級彈道飛彈潛艦的聲納系統升級到AN/BQQ-10 ARCI (V)5,維吉尼亞級的聲納系統是在AN/BQQ-10 ARCI (V)5及以上,洛杉磯級核能攻擊潛艦的聲納系統則是AN/BQQ-10 ARCI (V)4或5,俄亥俄級巡航飛彈潛艦(SSGN)的聲納系統則為AN/BQQ-10 ARCI (V)4。 BQQ-10也成為2000年代服役的維吉尼亞級(Virginia class)核能攻擊潛艦的基礎系統,包括艦首大型球形主/被動陣列聲納 (陣面由超過1000個水聲換能器構成)、Chin高頻主動聲納、AN/BQG-5A輕量化寬孔徑側面被動陣列聲納(Light Weight, Wide-Aperture Array,LWWAA,見下文),並配備TB-16D粗線型拖曳陣列聲納與洛馬的TB-29A細線拖曳陣列聲納各一 。維吉尼亞級核能攻擊潛艦從第三批(Vigirnia class Batch 3)起,以適形的大孔徑艦首聲納(Large Aperture Bow Array,LAB,見下文)取代原本的艦首球型陣列。 此外,更新一代的TB-33/34拖曳陣列聲納也已經推出,將用於取代現有的TB-16/TB-29;其中,TB-33為細線型,而TB-34可能是粗線型。與TB-16/29相較,TB-33/34最重要的改進是以光纖纜線取代 傳統傳統電纜,性能差異不大,但可靠度顯著提升。在2006財年,美國海軍訂購了兩套TB-33進行測試。 在2016年美國海軍披露的聲學優勢計畫(Acoustic Superiority,AS)中,包括發展新一代拖曳陣列聲納技術的快速原型發展(Rapid Prototyping),稱為次世代遙測(Next Generation Telemetry),由L3 切薩皮克科學集團(L3 Chesapeake Sciences Corp)負責,利用TB-23以及TB-29A拖曳陣列架構為基礎進行原型發展測試,在2016年3月16日安裝在洛杉磯級核能攻擊潛艦哥倫比亞號(USS Columbia SSN-771)進行測試。換裝次世代遙測技術組件的TB-29聲納稱為TB-29X,性能維持TB-29A的水平,但降低了功率需求以及連接處,降低單點失效(single points of failure),提高了可靠度。第一個TB-29X合約在2016財年簽署,2017年起交付美國海軍。
寬孔徑被動陣列聲納(WAA)
建造中的 海狼號(USS Sea Wolf SSN-21),可以看到艦體側面三個寬孔徑被動陣列聲納(WAA)的陣面 根據先前對於適形被動陣列聲納與快速被動測距聲納的研製與使用經驗,美國海軍在1970年代就展開寬孔徑被動陣列聲納(Wide Aperture Array,WAA)項目 , 目標是研製一種長距離警戒用的艦側被動陣列聲納,可最大範圍地涵蓋艦體兩側方位,並解決低頻拖曳陣列聲納難以判斷左右方位的先天弱點;因為WAA的目標是用被動模式快速測量目標方位(基本原理是對單一脈衝信號進行三角測量),因此又稱為 快速被動定位聲納((Rapid Passive Localization,RAPLOC)。與先前美國海軍1960年代推出的PUFFS水下被動射控聲納相較,寬孔徑被動陣列聲納的操作頻段更低、涵蓋頻譜更廣;除了直接聲學通道之外,WAA後端系統還結合了先前用於球型陣列聲納的間接聲學通道傳遞作業模式(包括聲學匯聚、海底反射、水面反射等),兼具快速被動定位以及長距離被動聽音的能力。先前PUFFS整合到淚滴船型的長尾鯊級(Thresher class)核能潛艦的測試結果並不理想,因此美國海軍放棄在核能攻擊潛艦上部署BUFFS的計畫;直到WAA出現,才成為第一種適用於淚滴型核能潛艦的被動射控聲納系統。 相較於傳統位於艦首的被動陣列聲納,側舷寬孔徑聲納可以涵蓋艦體縱幅,等效聽音基陣大得多,操作頻率可降低(一般可到500~2000Hz,某些基陣較大 的系統甚至可達200Hz),延長了聽音距離 ,並且彌補了艦首聲納無法涵蓋的方位;此外由於基陣夠長,足以判斷聲源抵達聽音陣各處的時間差,因此潛艦本身不需 配合機動即可進行快速目標動態追蹤(TMA),並可測量目標的姿態(bearing)和姿態變化率(bearing rate), 其波束設計能同時有效追蹤多個目標並保持相當高的精確度 ,效能直追一些基陣數十公尺長的輕型拖曳陣列聲納。雖然受限於艦體尺寸,側面寬孔徑聲納的基陣長度終究比不過新一代細線型拖曳陣列聲納,也無法完全免於自 身噪音干擾或避免艦尾音擋區死角。但由於WAA固定於艦體上,船艦無論如何機動,聽音陣列都不會變形,也存在左右方位判斷的問題;反觀施放出去的拖曳陣列聲納,柔性基陣因艦艇轉向或洋流而扭曲晃動,造 成信號失真,施放出去之後船艦的機動大受限制,而且拖曳陣列難以直接辨認方向。 WAA這樣的大型側面陣列聲納,對於填補拖曳陣列聲納和艦首聲納之間的波段差距頗具意義。拖曳陣列聲納孔徑頗大,能有效截獲傳遞較遠的低頻信號, 並針對特定的低頻分立頻譜(例如某些已知的靜音型潛艦的音響特徵)進行窄頻分析;而且部署拖曳陣列聲納之後,潛艦本身的戰術機動大受限制。潛艦一旦轉向,柔性的拖曳陣列聲納也會跟著彎曲,至少要數分鐘才能重新拉直,期間彎曲變形的陣列的效能就會大幅減低。艦首聲陣列納雖然具有高精確度,但由於先天孔徑比拖曳陣列差太多,無法接觸拖曳陣列聲納所獲得的聲納信號。而大型艦體側面陣列聲納的孔徑高於艦首聲納,精確度 則高於在水中漂浮擺動的拖曳陣列,因此能在4至7海里、視情況最多可能達10海里的距離上,獲得拖曳陣列聲納所接觸的低頻窄頻信號而完成聲納交班,隨後在一般連續頻譜操作下完成射控解算,大幅增強了接戰靜音潛艦的能力 ,並有效發揮MK-48魚雷的射程。而對於日趨靜音化的俄羅斯潛艦,WAA之類的聲納系統也有其必要,以盡量彌補失去的偵測距離。在美國海軍實際使用時,在淺水環境下,WAA在艦首球型聲納接觸之前,就已經能建立對目標的動態分析。 寬孔徑陣列聲納計畫原由美國伊多公司政府系統部門(Edo Corporation,Government Systems Division)研發,後來與GE潛艦信號部門(原RCA)合併成馬丁.馬里塔(Martin Marietta)公司,該公司的型號為1000型系列;原型系統首先於1986年裝備於洛杉磯級核能潛艦的奧古斯特號(USS Augusta SSN-710)上進行測試,編號為AN/BQG-5。WAA被最後六艘改良型洛杉磯級(SSN-768~773) 核能攻擊潛艦所採用(從哥倫比亞號(USS Columbia SSN-771)起安裝),稱為AN/BQG-5分立式寬孔徑被動陣列聲納(Stand-Alone Wide-Aperture Array,SWAA);而隨後1990年代推出的海狼級 (Sea Wolf class)核能攻擊潛艦也裝備AN/BQG-5 WAA,並與AN/BSY-2潛艦戰鬥系統整合。 多年後,美國國防部也批准此類聲納的外銷,可安裝於柴電潛艦上。 WAA 聲納由布置於艦體兩側的聲傳感測器陣列、 操作顯控台、處理器機櫃、信號調節器構成;每艘潛艦配備六個聽音陣面,兩舷各三個;每個子陣列長4m,共有八個單元,由404個水聲單元組成,每單元間距 0.5m,採用模組化結構;追蹤裝置包括16個幅度內插裝置 (寬、窄頻結合)與3個高精度追蹤裝置(寬、窄頻和信號調制譜(DEMON)相結合),頻譜分辨率為0.32-1.30Hz,方位精度為0.4度。每個WAA陣面的長度與寬度都比較大,較大的寬度(垂直向)允許聽音波束做更大的垂直向調整,可提高聽音涵蓋面、對準海水匯聚的特定方向或者避免噪音干擾。WAA聽音陣列安裝在舷外電子艙(Outboard Eelectronic Canister)內,這是一種附加在艦體外部的耐壓艙結構,一邊連接聲納的水下聲感組件,另一邊則是與艦內作戰系統連接的電力/信號纜線介面(穿透壓力 艙)。 1110型聲聲納利用方位測定技術和頻率分析來實現遠距離同時多目標偵測,並利用寬頻、窄頻信號處理內插法來進行目標追蹤。 1110聲納系統的寬頻搜索範圍為300~1500Hz,窄頻搜索為300~1000Hz,頻譜調制分析為0~250Hz,聲納聽音涵蓋面為潛艦左右兩側 各135度, 能形成94個寬頻波束與48個窄頻波束。運作時,左、右兩舷陣列的模擬信號送到信號調節器上,信號調節器裝在兩個相同的小型裝置內, 其中有前放、濾波和增益控制;數據經過放大和濾波後,再送到處理器單元,以大於30kHz的頻率進行採樣,成為12位元的數位信號; 信號處理器內裝有自適應聲噪抵消器的接口。數位波束形成器為真時延遲設計,左右兩舷側陣列各自形成獨立波束,其中窄頻搜索的預成波束為48個,彼 此等間隔7.5度,覆蓋頻率可到1KHz;而寬頻預成形波束為94個,具有良好的方位精度,可在幾個頻帶內處理資料,可用的頻率範圍達1.5kHz。 由於左右兩舷的陣列分別進行波束形成,因此能輕易判斷左右方位,彌補低頻拖曳陣列聲納在這方面的弱點。WAA也兼具以往被動測距聲納的功能:一般被動測距 聲納使用三個子陣列,透過估算同一聲源信號抵達三個子陣列的時間差,再經過球面波或柱面波的波形曲率變化,進而測量各子陣列之間的相對時延,來估算目標的 距離;由於美國核能潛艦艦體較長,WAA的三個側舷追蹤陣列遂可構成較大的基陣,基陣越長則測距越準確。WAA等效孔徑大 ,靈敏度高, 可增加使用低頻的精確度,偵測敵方靜音潛艦的特定低頻窄頻噪音;其換能器陣列單元布置在艦體外部,不佔用艦內空間,同時又能減低艦內噪音的干擾。 此型聲納的所有搜索、追蹤與目標分類功能,都可在一個輕量化顯控台上完成;顯控台能顯示寬頻、窄頻、調制譜和聲監聽數據, 並利用兩個48.2cm(19英寸)高解析度彩色陰極射線管顯示器來各自以寬頻、窄頻方式顯示。操作人員可選擇使用五種基本顯示模式, 包括寬頻搜索、窄頻搜索、窄頻低頻譜(LOFAR)搜索、高質量追蹤分析和聲監聽接收分析。WAA聲納的後端系統內建自我撿測裝置, 能進行全範圍的系統監視與故障不為標定,便於迅速維修與排除故障,此外也內建訓練功能。WAA聲納系統也設有數據接口,能與其他聲納 、作戰系統整合,例如在顯控台上顯示艦首聲納系統的數據。 2000年代以後的潛艦聲納系統
輕量平面陣列聲納 在1990年6月,美國海軍水下系統中心(Naval Underwater System Center,NUSC)發出一個關於低成本光纖平面陣列聲納(Low-cost fiber-optic planer array,LCPA)或輕型平面陣列聲納(Lightweight planner array),在28個月的合約期間建造兩個由49單元構成的聲納陣列,獲得合約的利頓(Litton)最後完成了具有56個頻道的光纖平面陣列。這項技術隨後可能應用來改良海狼級與洛杉磯級的聲納系統,此外 可能也為之後的輕量寬孔陣列聲納(LQQAA)奠定了基礎。
輕量寬孔陣列聲納(LWWAA)/適形聲速聲納(CAVES) 2000年代服役的維吉尼亞級核能攻擊潛艦以進一步改良的AN/BQG-5A輕量化寬孔徑被動陣列聲納(Light Weight, Wide-Aperture Array,LWWAA)來取代原本的WAA,其聽音系統全面更新,又稱為適形聲速聲納(Conformal Acoustic Velocity Sonar,CAVES)。LWWAA在1998財年展開1/4原型系統測試,在2000財年於洛杉磯級核能攻擊潛艦的普洛維斯頓號(USS Providence SSN-719)展開測試。
基於CAVES技術發展的輕量寬孔徑陣列聲納(LWWAA) 陣面 第一代WAA的聽音器 與一般傳統的聲納一樣,主要測量聲壓(Acoustic Pressure),而CAVES不僅以採用光纖技術、壓電單晶組件的輕量化聲壓換能器來取代原本WAA笨重的陶瓷壓電組件,另外還裝設三維向量感測器, 以正交平面排列來計算聲波 振速(Acoustic Velocity)的向量(稱為acoustic vector),能獲得的信噪比遠高於偵測聲壓;結合聲壓與聲速這兩種感測器提供的信號,搭配後端先進信號處理系統,CAVES就能合成比傳統聲納陣列更 窄而的接收波束,能達到更高的「訊號/噪音」比值與測向精確度,可精確判斷目標聲源的上、下、左、右。以往的聲納陣列若欲達到更大的接收孔徑、更窄的接收 波束以及更高的測向精度,唯一的方法就是加大陣列硬體來達到更大的孔徑。而新的三維向量感測信號處理技術就能突破傳統的限制,讓更小型的聲納也能達到等同 於更大接收孔徑聲納的效果。 此外,LWWAA的陣面也比第一代WAA更大,除了測距定向之外,也提供了更好的聽音性能。
CAVES不僅性能比WAA更好,而且輕量化聽音陣列不僅體積重量低得多,且對艦體結構影響較小,安裝施工更為簡易,能安裝在潛艦外部隔音瓦層裡面,降低衍生的流體阻力。
相較於原有的聲納技術,CAVES理論上能節省2/3的購買/安裝成本以及減少10%的壽命週期成本。 適形陣列聲納 從1960年服役的白鲑魚號(USS Tullibee SSN-597)以來,美 國核能潛艦都一律配備佔據整個艦首空間的球型陣列聲納,此種聲納有利於精確地合成與接收波束,並能獲得最佳的聲納涵蓋面;不過球型聲納陣列的生產成本很 高,需要使用精密電腦控制、動用複雜的五軸切割機才能製造,而且需在球型陣列上鑽幾百個孔,以配合安裝用於連接聲納單元及艦內信號處理系統的電子線路,為 此球型陣列需要保持水密,這些都需要高精密度的生產與品管,也是高價的代名詞。此外,由於球型聲納佔據艦首艙區,魚雷管不得不移到後面、朝兩側傾斜布置,使得魚雷發射時的潛艦的航速、機動等都受到限制。 為了克服這個問題,美國海軍以「適型陣列」(Conformal Array)聲納技術,將構成聲納陣面的水聲組件布置在艦體表面。而要達到與球型陣列聲納相等的涵蓋面,適型陣列必須覆蓋形狀複雜的艦首。相較於球型陣列的音鼓,覆蓋艦首的適形陣列形狀頗為複雜;艦首外型是全艦最複雜、曲率變化最大區域之一,艦首正面一小塊趨近球型,但往後延伸彎曲度變化,到後段比較接近平板狀,整個形狀像是一個立體馬蹄形。要讓這種不規則形狀的陣列和成聲納波束,達成與球型陣列聲納相當的波束指向性與追蹤精確度,對後端的計算機處理速度、控制波束合成的演算法,都是一大挑戰。 在1980年代初期研議SSN 21核能攻擊潛艦(後來的海狼級)時,美國海軍就曾打算使用先進適型聲納陣列系統(Advanced Conformal Sonar Array System,ACSAS),收/發陣列覆蓋整個艦首,只需要保留艦首魚雷管外門的開口。如此,就能在兼顧艦首聲納涵蓋面的同時,把魚雷管布置在艦首直向發射,使潛艦在較高的航速下也能發射魚雷。然而,當時的計算機技術還不夠成熟,無法讓ACSAS聲納的不規則形狀陣列合成良好波束,所以最後海狼級還是採用傳統的球型陣列聲納。 隨著適型陣列的技術領域逐漸發展,加上1990年代起計算機運算能力突飛猛進,在艦首布置適型陣列聲納取代球型陣列聲納,逐漸成為可能。美國海軍第一種實用化的輕型適型聲納陣列,是安裝在潛艦帆罩兩側的低成本適形陣列(Low-Cost Conformal Array,LCCA),這是一種高頻主動聲納陣列,首先出現在2000年代起艦成服役的維吉尼亞級核能攻擊潛艦上;此外,已經服役的洛杉磯級、海狼級核能攻擊潛艦以及俄亥俄級核能彈道飛彈潛艦也都會在帆罩上追加LCCA。加上原本就安裝在帆罩前部的高頻避雷主動聲納,美國潛艦的高頻主動聲納系統就此具備對周邊水域的360度涵蓋面。如此,在潛艦上浮階段能更快速地探測周邊是否有船隻迫近,增加上浮作業的速度與安全性;此外,通過狹窄水道、淺海時,也能更方便地確認航道安全。LCCA的聲納陣列硬體由洛克西德.馬丁集團任務系統與感測器部門(Lockheed Martin Corp. Mission Systems & Sensors)負責生產。
第三批維吉尼亞級(上)的艦首裝備大孔徑艦首適形陣列(LAB),取代前兩批次 維吉尼亞級(下)使用的傳統球型陣列聲納。
LCCA適型陣列聲納第一種實用化的型號,是首裝於第三批維吉尼亞級(Vigirnia class Batch 3)的大孔徑艦首聲納(Large Aperture Bow Array,LAB)聲納;第三批維吉尼亞級總數八艘,2008年12月簽署建造合約,在2009至2013年陸續開工建造。此種適型陣列聲納能達到與球型陣列聲納類似的效能,但硬體體積、重量、施工複雜度與成本都顯著降低;而且LAB的陣列包圍在艦首外部,陣列口徑比先前安裝在艦首內的球型陣列更大。 第三批維吉尼亞級的LAB是一個由1800個聲納收發單元組成的適形陣列,緊貼於整個艦首 的外部,能獲得類似傳統球型陣列的空間增益,並可預先形成波束,發射、接收等波束成形信號處理都是數位化。LAB陣列使用了類似於前述LWWAA/CAVES的技術,結合了接收音響信號的聲壓換能器 以及測量聲波振度的三維向量感測器,合成更窄而更精確的接收波束,可直接判斷目標聲源的上、下、左、右。值得一提的是,英國在特拉法加級(Trafalgar class)核能攻擊潛艦上就曾應用較早期的艦首適形陣列聲納技術(只有被動聽音部分),雖然當時性能不如美國的球型聲納,但整體而言仍相當不錯;由於英國有這方面的工程經驗,因此美國遂找英國BAE System作為第三批維吉尼亞級潛艦上包含適形聲納系統的整合式艦體前段的主承包商。 除了提高性能之外,LAB聲納省卻了精密昂貴又費工的球型陣 列;由於採用新的電子連線技術,LAB聲納陣列不需如球型陣列聲納般為電子線束鑽孔,而且 是直接設置在艦首外部浸泡在海水裡(新線路能長期在這樣的環境操作),不像球型陣列需要維持水密,避免了不少施工與品管的麻煩。此外,設置在潛艦艦首內部的聲納陣列(無論是球型或環形),為了讓聲納陣列接觸海水來傳導聲波,聲納艙區必須是非水密的壓載艙,而耐壓艙區以及聲納球體還需要一條人員通道來連接,以進行必要的維修檢查工作;而LAB聲納則貼在艦體外部,不再需要安裝在壓載艙內,可以簡化內部結構、降低施工複雜度。配合LAB,第三批 維吉尼亞級的艦首結構也因此重新設計。相較於BQQ-10聲納每個接收單元要價5000美元,LAB聲納每個接收單元的成本只有600美元,施工成本也可節省11000美元。另外,以往美軍球型聲納陣列後方都要設置一個隔板(Baffale),此隔板為中空構造,中間是空氣,用來隔絕潛艦內部聲噪的多重反射(聲波在氣體傳遞的損耗,遠大於在液體或固體中);而此隔板結構需要開數百氣孔來維持壓力平衡。而換成LAB之後,就只需要中間注水的隔板(water-backed)來阻擋,相較於以往的空氣(air-backed)隔板結構更簡單(不需要氣孔),每艘潛艦的維護費用大約可節省1100萬美元。 美國海軍在第三批維吉尼亞級核能攻擊潛艦的南達科他號(USS South Dakota SSN-790)進行測試的聲學優勢計畫(Acoustic Superiority,AS)中,包含大型垂直陣列聲納(Large Vertical Array,LVA),也是一種應用CAVES技術的適型陣列聲納,安裝在艦體側面。 繼LAB之後,美國海軍也進一步發展整合艦首聲納陣列(Integrated Bow Conformal Array,IBCA),這是一種結合高頻( HF)、中頻(MF)的適形陣列,能一併取代美國核能潛艦上的中頻球形聲納、位於帆罩前端與艦首下方的高頻陣列聲納。維吉尼亞級Block VI(2024到2028財年編列)可能率先裝備此種聲納。 此外,隨著先進數位波束成形(DBF)的發展,能將全艦所有的被動聽音陣列(包括艦首球型陣列、低頻側面陣列以及拖曳陣列等)融合成單一孔徑的聽音陣列,使得整艘潛艦從艦首到艦尾乃至於拖曳陣列形成為單一聽音陣列口徑,不僅達到接近360度的聽音涵蓋面,且增長陣列口徑使低頻探測的效能最大化(天線口徑越大則增益越大,指向性越好)。相較於拖在後方的柔性拖曳陣列聲納,用整艘潛艦縱幅形成的聲納基陣是剛性的,不會隨著船艦運動而變形,具有更好的戰術實用性。 向量感應拖曳陣列聲納(VSTA) 繼TB-29/33/34之後,美國海軍拖曳陣列聲納在2010年代的進一步發展,是向量感應拖曳陣列聲納(Vector Sensing Towed Array,VSTA),結合與前述CAVES相同的同時測量聲壓(acoustic pressure )與聲波振速向量(acoustic vector)的技術, 使用光纖技術、壓電單晶組件的改良型水中聽音器單元,以及採用正交平面排列計算聲波振速的三維向量感測器,能在不改變 陣列方向的情況下,直接分辨目標在上、下、左、右的方向(法國在1990年代末推出的CAPTAS三元聽音陣列拖曳陣列聲納仍為傳統的聲壓感測式,只能在 較高的頻率做到分辨左右)。VSTA聽音器的最低工作頻率可達10Hz,能在小體積內達到極高的接收靈敏度與信噪比。綜合以上新技術,雖然VSTA的拖曳 陣列直徑只有半英吋,但一條的效果就等於美國海軍T-AGOS音響探測船的UQQ-2 SURTASS(雙TB-29陣列)的性能。第一套VSTA原型陣列在2011年由水面船艦進行海中測試。 註:潛艦作戰的目標動態分析(TMA) 目標動態分析(Target Motion Analysis,TMA)是在二次世界大戰中發展出來的技術,基本原理是利用被動聲納間歇地測量敵方潛艦方位,以潛艦自身的航線(含方位、速率)為基線,利用空間幾何與三角等數學,推算出敵方潛艦的航向與距離。 在面對水下的潛艦時,潛艦不像是在潛望鏡深度或浮航時接戰水面船艦一樣能用潛望鏡或雷達直接定向與測距,只能使用聲納。主動聲納雖然能輕易測量距離與方位,但潛艦為了避免暴露自身位置而盡量避免使用,因此只能用被動聲納聽音來獲得目標信息;但被動聲納聽音只能獲得信號的方向(Bearing),單純靠方向信息進行TMA(又稱為純靠方位TMA,Bearing Only - TMA,BO-TMA)遂成為現代化潛艦作戰的一大難題,尤其是我方與敵方的航速、航向甚至深度都會改變。如果我方潛艦與敵方潛艦都正好維持相同的恆定航向與速率(Constant Course and Speed,CCS),被動聲納探測到的敵-我相對方位就永遠不變,這樣永遠不可能計算出目標的距離。因此,潛艦必須進行適當的機動(Maneuver),透過計算不同方向、速度之下目標信號的相對方為變化,才能解算出距離;然而,同時間敵方也可能進行機動而使航速與航向改變,進而對TMA帶來許多變數。又,這些為了進行BO-TMA作業的機動,對於水下航速較慢且能源有限的柴電潛艦而言比較不利,因為這些機動變向會影響潛艦追上目標的時間,更會消耗更多蓄電池的電量。 最早的潛艦TMA作業在二次大戰之前就已經出現,使用簡單的「地理繪圖法」(Geographic Ploting)。假定目標是維持恆定航向與速率(CCS,Constant Course and Speed,CCS),用一個表尺的刻度代表目標固定週期所移動的距離,調整尺的角度與位置,如果能讓表尺刻度與多個時間點量測的視線(Line of Sight,LOS)交叉,則表尺的狀態就是目標的航線(航速與航向),於是完成了TMA目標運動分析。這種作業的前提是必須知道目標的航速;對於水面目標而言,可以用潛望鏡視野中的尾浪猜測速度,或者運用二次大戰期間首次用於潛艦的雷達進行測量;對於水下目標而言,也能用聽到的螺旋槳轉動頻率來判斷(必須先知到敵潛艦在特定轉速之下的航速),或是從對方航線用標準的任務航速來判斷。 在潛艦對潛艦的BO-TMA領域中,最著名的經典演算法,是1956年美國海軍少將John "Joe" Ekelund發明的「Ekelund測距法」(Ekelund Range)。此種演算法是根據「方向率」(Bearing Rate)來計算,也就是聲納探測出的方位角(相對我艦)在時間軸上的一次微分(斜率),而不是直接使用方位角;這是因為測量出的目標方向角可能會因為陣列聲納水聽器之間的間距而有誤差(稱為Delta Bias),而改用方向率則可降低這種誤差的影響。Ekelund測距法是潛艦先以固定航向、航速(CCS)航行一段距離(稱為1st Leg),從被動聲納獲得2個以上的方位資料接觸,將2個角度相減並除以時間而得到第一個方向率(稱為BR1)。接著,潛艦以大角度轉向,再航行一段距離(稱為2nd Leg)並測到2個以上方向,以同樣方法計算出第二個方向率(BR2);運用這兩段航行期間探測到的兩個方向率(BR1與BR2)以及兩段航行中我艦垂直於視線(LOS,相對於目標)的航速分量(V1與V2),經由一連串簡化以及取近似值的數學運算,就可得到目標距離(R)概估值,然後用幾何繪圖法標出目標的航向與速度。當然,以上運算是假定目標在我方這兩段航行期間,都維持相同的航向與航速。 Ekelund測距法也會產生誤差,主要來源包括目標航速在LOS視線上的分量,以及我艦轉彎的半徑造成兩段航行之間的間隔,都會影響最後解算的距離數字。在1960年代,美國海軍專家又發展出「時間校正」(Time Correction)公式,可根據多個已知參數計算出「最佳時間」(T*);如果利用Ekelund測距時在這個時間區間內完成轉向,就能抵銷多種誤差的影響。此外,為了減少Ekelund測距法的誤差,我艦航向與視線越垂直越好,可以減低我艦對目標的接近速度,甚至有可能降到零。 而另一種BO-TMA演算法,是日後美國海軍海洋研究員Fred Noel Spiess博士發展出的「四向法」(Four-Bearing):潛艦先以固定航速與航向(CCS),用聲納取得3個目標方向資料,根據地理繪圖法可以得到目標的航向;此時,我艦轉向,用聲納得到第四個方向(B4),然後根據我艦如維持原本航向、航速而會探測到的目標方位B4'(假設目標維持相同航速與航向),則B4與B4'必會交叉,交叉點就能決定目標位置、航速與速度。相較於Ekelund測距法,「四向法」對於方向率較小的狀況下比較有效,不像依賴方向率的Ekelund測距需要較大的方向率才容易計算,對於潛艦TMA機動的要求較高。「四方向」法的問題在於,受聲納測向誤差影響的程度較大;此外,在某些情況下,此方法計算目標航線並非唯一解。 在數位電腦出現以前,上述的BO-TMA作業都需要人工進行。直到1960年代出現的MK-113半數位化魚雷射控系統,才首次實現了自動化的TMA。MK-113的核心是Librascope公司的MK-130數位電腦,屬於第二代電腦(以電晶體組件取代真空管),空間比過去真空管的第一代電腦大幅降低,可以塞入潛艦內。MK-130數位電腦能處理加減乘除以外的邏輯運算,這是先前機械式的魚雷資料計算機(Torpedo Data Computer,TDC)或類比式MK-101射控系統做不到的;因此,MK-130能實作複雜的TMA演算法。依照Norman Friedman書中記載,MK-113的TMA演算法是Ekelund測距,不過實際上是開發MK-130數位電腦的Librascope的顧問Van Woerkom所發明的CHURN演算法,這是一種四變數的矩陣演算法,更適合以數位計算機運算。日後Van Woerkom加入建造核能潛艦的通用電船(GDEB(的研究團隊,繼續研究TMA議題;Librascope在1960年代被Singer Corporation購併,專門進行指揮/管制/通信(Command, Control, Communication,C3)領域,Singer Corporation在1992年被Loral合太空與通信(Space & Communications),在1996年被洛克希德.馬丁(Lockheed Martin)集團購併,吸收到洛馬集團聯邦系統(Lockheed Martin Federal Systems),而之後又變成Lockheed Martin NE&SS Undersea Systems。 雖然1960年代以後美國海軍逐漸裝備了具有自動TMA能力的數位水下射控系統,然而美國海軍核能潛艦部隊作業時,始終維持 一個人數不少的TMA小組隨時用人工進行解算,與自動的TMA進行交互比對,到冷戰結束都沒有改變;美國海軍核能潛艦需要編制相對較多人力的重要原因,就 是作戰時在控制中心需要的人力較多,其中就包含人工TMA作業。這可能是預防射控計算機故障的措施,而美國海軍也希望持續維持潛艦射控人員不靠自動化設備仍能進行TMA解算的能力,必須不斷進行訓練。 當然,相較於全人工作業,自動化TMA可以 更快獲得概略解算,也可避免人工計算錯誤,有助於讓潛艦搶佔先機先發射;英國皇家海軍的潛艦部隊就較早實施全部以自動化TMA接戰。 另外,TMA演算法是敵我相對方位、距離的概估值,輸入的敵方潛艦運動參數品質也會影響結果。 敵艦的動態資料來自於被動聲納接收敵艦聲響,而聲波在海洋中的傳遞會受到水文環境影響, 需要瞭解現地周遭水文環境(溫度、 洋流、水層、深度等)來瞭解該水域的聲波傳遞的模型(包含聲速、傳播路徑等)。此外,還預先知道目標潛艦的聲學特性,尤其是特定潛艦的螺旋槳每分鐘轉速(RPM)與航速的對應關係(Turn Per Knot,TPK)。較早期負責處理TMA的計算機的處理能力相對有限,能考慮的因素較少,而且可能 沒有夠好的演算法或足夠的水文資料。 例如在一次北約演習中,一艘德製潛艦在與美國核能攻擊潛艦攻防時,該艦自動化的目標追蹤程序嚴重誤判美國潛艦的距 離,導致這艘潛艦在完全不正確的距離上決定發起攻擊(可能使用了主動聲納做最後標定)而暴露位置,最後被美國潛艦擊敗;這艘潛艦誤判距離的原因,很可能是 艦上的自動化系統的聲學演算法是針對德國周遭的淺海,在當時演習的開闊深水域中就完全不適用。不僅是海洋背景環境的噪音干擾,敵方潛艦也可能利用聲學特性 進行反TMA機動或其他反制措施,這在自動化TMA技術還不夠成熟時,都只能靠有經驗的人員以人工作業來彌補。 註2:LOFAR信號頻譜分析技術 低頻分析和測距(LOw Frequency Analysis and Ranging,LOFAR)是一種信號頻譜分析技術,利用快速傅利葉轉換等信號處理方式,將特定頻率的信號從包含各種音頻的背景聲學信號中分離出來(例如目標噪信中最明顯的頻段), 這使得潛艦能以自動化的方式尋找特定目標的頻段(而不是只能依照人工聆聽識別),大幅增加在海洋背景噪音中搜索特定潛艦的能力,甚至能識別同一型潛艦每一 艘之間聲噪信號的些微差異,這對於掌握敵方潛艦技術特徵以及調動部署等極具價值。LOFAR過濾特定音頻的能力也有助於改善同時追蹤多目標的能力;如果同時追蹤的好幾個目標方位重合或交錯,在TMA作業中發生混淆,就會解算出錯誤的目標距離與航向,而LOFAR的識別能力就能降低這類錯誤的機率。與LOFAR相關的是解調噪音(Demodulated Nose,DEMON),將基頻聲噪從多種不同頻段的聲源中解調分析出來;例如,潛艦的噪信包含機械運轉、俥葉旋轉等,而LOFAR作業需要將俥葉轉動的噪信(通常頻率較低)從其他聲噪中解調出來。LOFAR圖像的顯示以頻率為橫軸、時間為縱軸,各種不同頻率的自然噪音在顯示器上如雪花一般;而進行LOFAR窄頻分析時,如果探測到鎖定的特定窄頻,就會在顯示器上於特定頻率點上呈現一條白色直線。 LOFAR技術結合拖曳陣列聲納的低頻、窄頻監聽能力,使得美國海軍潛艦 部隊能夠開始為蘇聯潛艦建立起數位化聲紋資料庫(而不是依靠聲納人員的個人經驗),記錄每一艘潛艦獨一無二的聲紋信號;隨時維護、更新聲紋資料庫對於反潛 作戰至關重要,因為LOFAR音頻分析要處理的資料量極大,最先進的信號處理器在同時間也只能處理少數幾個頻譜線,這意味著平時必須盡量蒐集敵方每一艘潛 艦的聲紋信息並建檔,進行LOFAR分析作業時才能根據可能出現的目標形式,對某個特定頻譜進行搜索,如此才能將LOFAR的作業效率提升到最大。類似 地,為了最有效地進行LOFAR作業,也必須預測自身的被動聲納系統對特定目標噪信的響應情況。而行蹤隱密、配備精良聲學裝備的核能攻擊潛艦如鱘魚級,就 成為蒐集並維持敵方潛艦聲紋資料庫的最佳平台。LOFAR過濾特定音頻的能力也有助於改善同時追蹤多目標的能力;如果同時追蹤的好幾個目標方位重合或交錯,在TMA作業中發生混淆,就會解算出錯誤的目標距離與航向,而LOFAR的識別能力就能降低這類錯誤的機率。
|