美國海軍聲納系統(水面艦)
伯克級飛彈驅逐艦約翰.保羅.瓊斯號(USS John Paul Jones DDG-53)的AN/SQS-53C艦首聲納音鼓。
注意此音鼓使用橡膠製聲納窗(window)。

(上與下) 台灣海軍基隆級(原美軍紀德級)飛彈驅逐艦基隆號(DDG-1801,ex-USS Scott DDG-995)
艦首AN/SQS-53D聲納的音鼓,金屬組件是鋼製聲納窗,這是比較老式的組件(後來多被
橡膠窗取代)。攝於2025年8月16日高雄港。


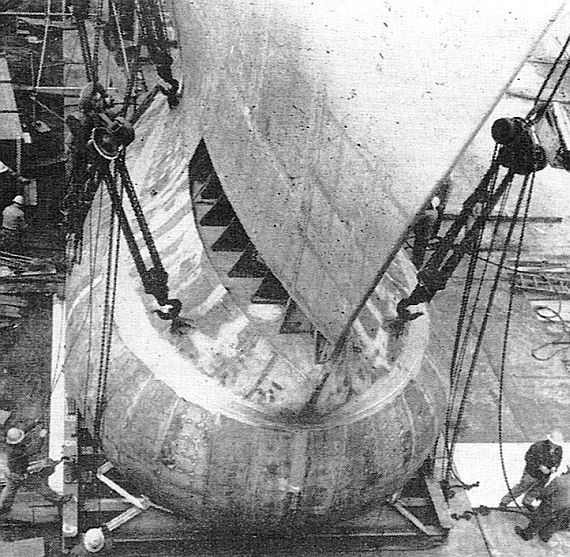
建造中的柏克Flight 3飛彈驅逐艦USS Ted Stevens (DDG-128)的艦首部位,可以看到SQS-53聲納安裝基座。
注意聲納音鼓位置後方設有一個擋板,阻止後方船艦自身噪音干擾到聲納運作。

一艘建造中的柏克級飛彈驅逐艦的艦首聲納座。
注意聲納音鼓位置後方設有一個擋板,阻止後方船艦自身噪音干擾到聲納運作。

建造中的提康德羅加級伊利湖號(USS
Lake Erie CG-70)飛彈巡洋艦的聲納室,此時工程進度約80%。

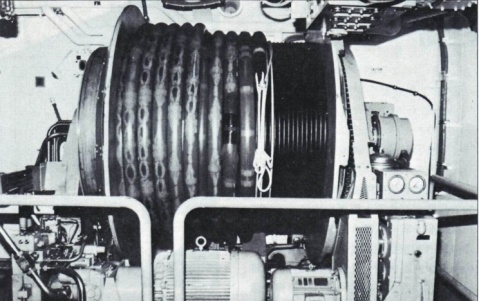
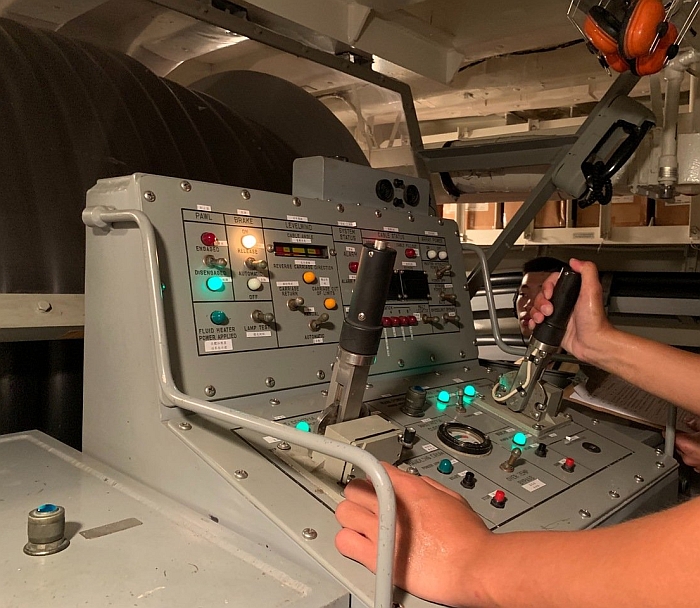
伯克級飛彈驅逐艦拉瑪吉號(USS Ramage DDG-61)的AN/SQR-19拖曳陣列聲納的絞車。
收放聲納陣列時,需有人員在絞車旁協助。

派里級巡防艦蓋瑞號(USS Gary FFG-51)的AN/SQR-19拖曳陣列聲納的絞車。
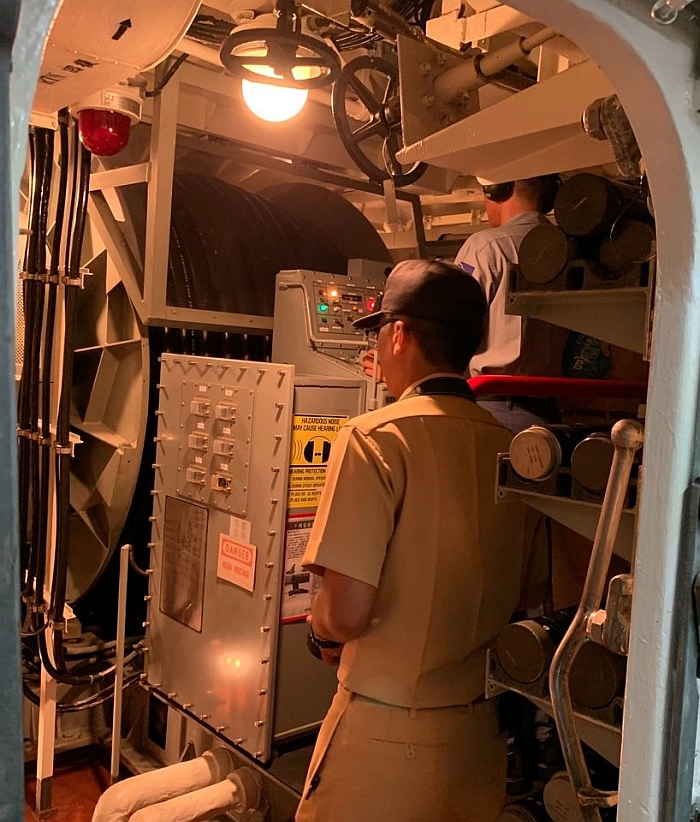
(上與下)已經移交給台灣海軍的派里級巡防艦銘傳號(PFG-1112 ex-FFG-50 Taylor )的AN/SQR-19拖曳陣列聲納操演
畫面。AN/SQR-19聲納放列任務須由四名官兵共同操作,資深士官在主控台控制絞車收/放的速度,此外需有兩名人員在
聲納陣列放列口附近協助,將角盤上的聲納電纜從艦尾緩慢放入水中水展開。
──By Captain Picard
|
水面艦固定聲納: 此種聲納裝備於艦艇首部 或艦首下部一個囊狀外罩中,屬於與艦體結構有關的固定聲納部分,兼具主動與被動偵測能力。 SQS-23低頻艦首聲納 這 是美國海軍在二次大戰以後發展的長程艦首低頻方位掃描(azimuth-scanning)聲納,由Sangamo 生產,1958年起服役 ,替代1950年代初期服役的SQS-4。SQS-23是第一種配合ASROC反潛火箭的聲納系統,能通過直接聲學通道在10000碼的距離上提供可靠的標定與測距;為了達成這樣長的操作距離,SQS-23擁有一個直徑達20英尺(6.1m)的大型換能器陣列,由48個單元(staves )構成,每單元有兩個水聲換能器(transducers),總共有96個頻道 ;每次拍發時,聲納陣列的換向器(commutator)掃描每單元的兩個水聲換能器,每秒掃描150次。 AN/SQS-23有兩種顯示,搜索時使用船艦中心顯示(Ship Center Display ,SCD),精確標定攻擊時使用目標中心顯示(Target Center Display,TCD)。SQS-23聲納換能器陣列本身重28噸,整個聲納罩帶來的排水量約60噸。 由於AN/SQS-23聲納陣列巨大,不適合裝在過去龍骨聲納(艦首後方相當於15~20%艦體長度、龍骨下方的位置)的位置,因此改裝在艦首下方,成為美國海軍第一種艦首聲納;為了獲得360度全向搜索能力,SQS-23聲納罩比龍骨基線向下突出6英尺(1.83m)。艦首聲納的艦首具有類似球鼻首的作用,在較高航速下可減低興波阻力;不過在中低速航行時,安裝艦首聲納的船艦會帶來艦底砰擊(slamming),耐波性能不如沒有艦首聲納的的船艦 。依照裝備SQS-23艦首聲納的李海級(Leahy class)船模測試,聲納整流罩在20節航速時會為船體增加9%阻力,但在30節以上航速時因為聲納罩抵銷興波的作用,反而使阻力減少2%。 早期型的SQS-23在海底反射和斂散區域性能的規格,針對地中海的特性 (深度較淺,以直接傳遞模式為主,匯聚區能力有限)而設計;這使得早期SQS-23雖然在直接聲學通道模式的操作距離大幅增加,但使用海底反射(bottom bounce)操作模式卻面臨許多問題,從未達到預定的使用距離;而即便使用直接聲學通道模式,同時期船艦的射控系統卻無法有效在這麼遠的距離進行追蹤並導引反潛武器攻擊。後來AN/SQS-23後續改良型經過改進,才較能利用間接聲學通道(使用匯聚、反射等聲學通道),已在深度較深的大西洋與太平洋發揮性能。 最早的SQS-23只能在5KHz上操作,SQS-23A(1971年開始測試評估,1973年起服役)起擴增為三個頻率(間隔250Hz),SQS- 23B(5KHz)引進SDT模式,SQS-23C具有兩個獨立的掃描器,分別是快速(738.8rpm)與慢速(54或13.5rpm),具有RDT與 SDT模式(後者波束寬為9.25度)。SQS-23D使用三種頻率(4550、5050及5550Hz,基頻頻寬380Hz)並引進FM slide(400Hz)。 早期SQS-23的聲源信號是244dB,距離表尺為1000、2500、5000、10000、20000與40000碼, 能在10000碼(9144m)的距離獲得可靠的探測數據,最大有效使用距離約14000~15000碼 (12.8~13.7km),實際操作中有時可達20000碼(18.3km)。SQS-23主要工作模式包括搜索RDT(Rotationally Directed Transmission)、 搜索分析SDT(由操作者設定仰角進行長脈波操作)、攻擊RDT(操作者設定脈衝寬度,標定目標時仍保持對周遭一定範圍的追蹤)、攻擊SDT(發起攻擊的 最終階段,信號脈衝集中在目標上),脈衝波束為連續波(CW)調頻(FM),脈衝長度可選擇2(後來改成5)、30、120豪秒(millisec)以及4.3秒。其中,搜索RDT模式下,會產生功率60KW的波束,並傳輸達4.3秒。 SQS-23歷經的主要改良是TRAM(Test, Reliablity, and Maintaince,將聲納換能器分組,每組包含8個換能器,並提供旋轉波束STD)、MIP(Modest Improvement Program,降低CRT顯示器上的背景雜波,並提供FM傳輸模式)、LORA(Long Range Addition,主要是降低自噪來增強遠距離效能並改進匯聚區偵測能力,包括以橡膠外罩取代原本的鋼鐵外罩,主要針對在大西洋服役的SQS-23聲納)。許多SQS-23改良時都換裝雷松(Raytheon)的固態換能器(SST) ,以三組固態組件機櫃取代原本的21個真空管機櫃與10個伺服馬達,體積重量減輕不少。SQS-23系列陸續經過TRAM改良,SQS-23A的TRAM版本是SQS-23E,SQS-23B的TRAM版本是 SQS-23F,SQS-23C的TRAM版本是SQS-23G。SQS-23H是SQS-23D的改良型,使用固態換能器(具備故障診斷標定能力),以 三個機櫃的固態組件取代原本21機櫃真空管組件和10個顯示信號產生器,有48個頻道,每個頻道驅動一個水聲單元。SQS-23E/F/G的固態版本分別 是SQS-23J/K/L。 在1960年代,美國海軍以SQS-23為基礎 進行性能與整合度改裝(Performance and Integration Refit,PAIR),稱為SQQ-23, 不僅全面改用固態電子組件,並增設一組獨立的追蹤被動聲納換能器(位於第一組的60尺後方,設置在一個獨立的罩子裡,通常每組由12個固態換能器構成,功率1KW)以及一個獨立的顯控台 ,因此SQQ-23具有兩組聲納罩 。結合原有聲納音鼓以及新的獨立換能器,SQQ-23具備主/被動偵測標定(passive-active detection and localization,PADLOC)的能力,在被動模式下也能透過比對兩個聲納硬體對同一個目標的接觸而進行定位。SQQ-23的 全向傳輸(Omni-Directional Transmission,ODT)模式的尖峰功率 160KW,脈衝長度160微秒;RDT模式的功率60KW,頻率4.3~5.7KHz。SQQ-23新增的聲納陣列使用橡膠外罩,而不是原本SQS-23的鋼鐵外罩。 SQS-23普遍使用在1950、1960年代的艦艇上,例如為二戰型驅逐艦升級的艦隊重整與維護(Fleet Rehabilitation And Maintenance,FRAM)計畫就包含換裝SQS-23聲納,以及新造的亞當斯級(Adams class)飛彈驅逐艦,法拉蓋特級(Farragut class)、長堤號(USS Long Beach CGN-9)飛彈巡洋艦、李海級(Leahy class)飛彈巡防艦(DLG,1975年升格為CG)以及班橋號(USS Bainbridge DLGN-25)核子動力飛彈巡防艦等,而小鷹級航空母艦的美國號最初也裝備了此一聲納。由於SQS-23聲納音鼓尺寸較大,用來換裝二戰時代的艦隊型驅逐艦時比較勉強。從1972年起,美國海軍部分SQS-23升級成雙聲納陣列的SQQ-23,例如四艘亞當斯級飛彈驅逐艦、兩艘法拉蓋特級飛彈驅逐艦。 此外,以固態組件升級的SQS-23(相當於PAIR)的外銷型號為DE 1190/DE 1191,換能器組有12、24、36、48、72、96等版本。其中,DE 1191結合了DE 1190的固態換能器(SST)以及經過修改的DE 1167接收與顯示器( Receiver and Display)。DE 1190的發射功率為28~56KW,DE 1191則為120KW。 SQS-26低頻艦首聲納
SQS-26第一套原型(NX-1)在1961年安裝在威利斯.李號(USS Willis A. Lee DL-4)號上。 SQS-26是美國海軍低頻聲納發展上的一個代表作 ,是美國海軍第一種能利用海底反射與深海聲學匯聚效應(註)來大幅提高探測距離的固定式艦載聲納,其主動操作頻率為3000~3500HZ,被動接收頻率為1500~4500KHz。SQS-26在利用直接聲學通道操作時,有效 距離就可達到20000碼(18.3km),利用海底反射或匯聚區效應更可達到70000碼(64km)以上。 SQS-26在1950年代末開始發展,第一套測試原型(XN-1)在1961年安裝於米契爾級(Mitscher class)領導驅逐艦的威 利斯.李號(USS Willis A. Lee DL-4)上進行測試,第二套測試原型(XN-2)則在1962年安裝於米契爾級的威金森號(Wilkinson DL-5)上進行測試。SQS-26的生產型分為AX、BX、CX三種衍生型,交由通用電器(General Electric,GE)與伊多公司(Edo Corporation,,2007年由IIT收購,該公司的C4ISR系統相關業務隨後分割到Exelis,在2011年10月31日成立)生產。SQS-26AX由GE生產, 1963年5月首度裝艦,裝備於兩艘布朗斯坦級(Bronstein class)與五艘賈西亞級(Garcia class)護航驅逐艦(FF-1040、1041、1043~1045)、前三艘布魯克級(Brooke class)飛彈護航驅逐艦(DEG-1~3)以及前兩艘貝克那普級(Belknap class)飛彈巡防艦(DLG-25、27,後來升格為CG)上;SQS-26 BX由Edo生產,裝置在後三艘布魯克級(DEG-4~6)、後七艘貝克那普級飛彈巡洋艦(CG-28~34)、五艘賈西亞級(FF-1047~1051)以及特魯克頓號(USS Truxtun DLGN-35)核子動力飛彈巡防艦上;SQS-26 CX 由從1967年12月首度裝艦,裝備於加利福尼亞級(California class)與維吉尼亞級(Virginia class)飛彈巡防艦、諾克斯級(Knox class)護航驅逐艦上,日後GE以SQS-26CX的技術升級SQS-26AX,升級後稱為SQS-26AXR(R代表重整,Retrofit)。 SQS-26龐大的體積導致搭載的艦艇必須大型化,設計時為護航驅逐艦(DE)的賈西亞級和諾克斯級,排水量都超過了二次大戰時代的艦隊型驅逐艦 (DD),導致價格上揚,能建造與負擔的數量減少。 SQS -26的主動拍發採用相位合成技術,能近行全方位發射,並能使用海底反射模式延長使用距離。SQS-26有72組換能器,每組8個換能器,波束角5度,整 體聲納音鼓直徑16英尺 (4.88m),高5英尺,尺寸相當於一艘60尺長的人員小艇,重量高達27.215公噸,而整個聲納外罩排水量更高達160噸,幾乎是前一代AN/SQS-23的2.7倍,尖峰發射功率100KW。SQS-26以主動模式操作的戰術顯示包括A掃描(A scans)與B掃描(B scans),長程被動模式獲得的情資則顯示在Unit 31海圖上,有效偵測距離通常勝過艦上的平面搜索雷達。SQS-26的發射器處理模式包括ODT以及可變壓縮(variable- depression),接收器處理模式包括搜索、攻擊、SSI/TDI。SQS-26使用兩組聲納信號處理器分別處理編碼(coded)與連續波 (CW)脈衝,擁有三個顯控台(分別負責A掃描、水面聲道以及目標追蹤)。早期SQS-26使用鋼鐵外罩,爾後改良時換成橡膠外罩。 SQS-26在設計時要求能在第一匯聚區(25海里)的距離上達到射控等級的偵測精確度,不過這個目標在1960年代末才達成(此前SQS-26只能接觸第一匯聚區距離上的目標但不能精確至射控等級);在1970年代中期 ,SQS-26達到原始設計中對海底反射與匯聚區的所有性能要求。 SQS-53低頻艦首聲納
提康德羅加級飛彈巡洋艦示羅號(USS Shiloh CG-67)的SQS-53B聲納的音鼓
外罩,此為鋼質聲納窗。 在1970年代初期,美國海軍便以AN/SQS-26CX聲納為基礎展開升級,新的聲納型號定為AN/SQS- 53,從1975年年初展開進行海上試驗,並於同年9月服役。SQS-53系列裝備於維吉尼亞級核子動力飛彈巡洋艦 、史普魯恩斯級驅逐艦、提康德羅加級飛彈巡洋艦、柏克級與紀德級飛彈驅逐艦上。 早 期 SQS-53的音鼓基本沿用SQS-26的架構,直徑為4.88m,高度1.5m,由72組TR -343換能器(transducer)組組成,每組由8個換能器構成 ,故總共有576個TR -343換能器,搭配一套AN/SQS-53後端陣列硬體;主動偵測模式包括直接傳導(Direct-path,有效距離15~20km)、海底反射(有 效距離20~30km)與聲音匯聚(Convergence)等三種,主動模式操作頻率為3500HZ,被動模式則為1500~4000HZ,主動模式的 最大發射功率約150kw。SQS-53的第一種量產型 是SQS-53A,基本上是SQS-26CX的固態電子化版,仍沿用後者的機械式掃瞄以及換能器陣列,但 以固態電子元件以及數位信號處理技術取代SQS-26CX原有的類比處理系統,SQS-53A擁有一具UYK-7電腦以及兩具UYA-4/OJ-194單 色顯控台。在主動模式 下,SQS-53A以直接路徑模式,最大操作範圍約18km(10海浬),以海底反彈模式的理論最大使用距離約36公里(20海浬),而利用匯聚區 (CZ)模式時,則可直接偵測約40~60km之外的第一 匯聚區;在被動模式時,SQS-53A最大偵測距離約40~50km。SQS-53A的後端總共有37個機櫃,包含信號處理、發射和顯控系統等。 前九艘提康德羅加級(CG-47~55)使用SQS-53A聲納。
SQS-53的聲納換能器陣列。 進一步升級的AN/SQS-53B以類比接收波束集射器取代SQS-53A的機械式陣列,波束形成(beam-former)由SQS-53A的機械式改為電腦控制產生 的預成形波束(pre formed-beam),主動偵測模式的改良包括數位扇形掃瞄指示器(Digital Sector Scan Indicator,DSSI)、大區域扇形追蹤(Wide Sector Track, WST)以及快速自動增益控制(Fast Automatic Gain Control, FAGC)等,此外後端增加AN/UYS-1數位聲學信號處理器(Acoustic Signal Processor)以及AN/UYQ-25聲納操作環境評估系統(Sonar In-situ Mode Assessment System,SIMAS),後端的控制電腦也換成AN/UYK-44(V)。SQS-53B的接收模式包括PPI、預成形波束、SSI/TDI。此外,SQS-53B以數位寬頻接收器取代SQS- 53A的類比系統,並以UYQ-21/OJ-452彩色顯控台、OL-190聲音資料轉換器數位裝備替換SQS-53A包括UYA-4在內的所有類比顯示 /控制設備。 以往採用機械式音鼓陣列的SQS-53A,在同一時間只能追蹤一個目標,而改用波束集射器的SQS-53B則能以主動、被動模式同時偵測並追蹤多個目標 (即Track While Scan,TWS),被動偵測能力也較SQS-53A更為進步。 AN/SQS -53C則以數位化寬頻發射集射器(transmitter beam-former)取代SQS-53B的類比系統,實現了信號處理與波束成形的全數位化,可和相位陣列雷達一樣運用電子控制的方式合成多道獨立運作 的不同波束並改變其相位,搭配西屋公司使用COTS科技的先進輔助處理器(Adiunct Processor),主動、被動操作模式一共可以同時追蹤100個目標,使用主動偵測模式時距離可達第二匯聚區(80km左右);此外,信號/噪訊比也 增加了。其他的改良包括以UYK-43電腦取代原來的UYK-7、納入AN/UYH-1大型記憶體系統、加強淺水操作能力(嵌入一套名為淺水主動套件(Shllow Water Active Kit,SWAK)的高頻聲納)等,並加裝一套王魚(Kingfisher)水雷偵測聲納。SQS-53C在安裝艦隻高速運動時仍能有效運作,主動搜索速 率大幅加快,淺水時目標辨認能力增加50%;早期型SQS-53A需要在較低的航速下才能探測到第一匯聚區的距離,而SQS-53C則能在巡航速率下達成 對第一匯聚區的探測。之後美國海軍還為SQS-53C進行「被動子系統現代化」(Passive Subsystem modernization)改良,以COTS組件取代SQS-53C原有的類比/數位轉換器以及被動式接收波束集射器(beam-former),大幅 降低了系統的體積與重量;原本SQS-53A/B有37個機櫃,早期SQS-53C也仍有31個(總重37000磅),經過COTS改良的SQS-53C 的電子設備重量大幅撿到13000磅,機櫃數量減少為15個。 維吉尼亞級、早期史普魯恩斯級、紀德級與早期九艘提康德羅加級(CG-47~55)裝備了SQS-53A,CG-56~66等11艘提康德羅加級飛彈巡洋艦 與部分史普魯恩斯級使用SQS-53B,而後期的提康德羅加級(CG-67~73)與柏克級飛彈驅逐艦都使用SQS-53C聲納。部分史普魯恩斯級的聲納 系統曾先後升級為SQS-53C,其餘 同級艦以及紀德級則使用政府用電子組件(GOTS)來改良SQS-53A/B,換裝新的寬頻被動式換能器 、UYS-1音響處理器、顯示訊號處理器、簡化操作程序與系統重量(、全面以數位組件取代類比系統、提升都卜勒解算能力、以UYQ-21彩色顯示系統取代 原先單色的UYA-4等等, 並提供12-16-30發音追蹤記錄功能。此一方案中,在SQS-53A上的改良程序為EC-16,在SQS-53B上的為EC-84,改良之後 統稱為SQS-53D。雖然沿用SQS-53A/B舊有的類比式發射器,但透過新的數位控制系統,SQS-53D仍能發射與SQS-53C以及王魚避雷聲 納相同的波束;此外,戰術顯示器的功能包括海底地形、沉船位置以及環境支援(射線描跡與性能預估)等。經過EC-16程序提升的SQS-53D聲納系統, 比SQS-53A減少15個顯控台以及11.3噸的重量,每年能節省了500個維修保養工時與75%的修理期程 (由29週降至5週)。 在1980年代,美國海軍史普魯恩斯級驅逐艦以艦上SQS-53聲納系統搭配LAMPS-III反潛直昇機系統,締造了首度持續追蹤蘇聯鯊魚級(Akula class)核能攻擊潛艦的紀錄,這是蘇聯解體前推出的最新型核能攻擊潛艦,靜音能力頗佳(接近洛杉磯級)。 SQS-56中頻艦首聲納 這 是一種較為簡單且陽春的中頻聲納,體積較小,美國海軍僅派里級飛彈巡防採用此聲納。SQS-56的音鼓由36組換能器組成,直徑1.2m,高0.96m, 主動模式的操作頻率為6600/7500/8400HZ,被動偵測模式則為4000~8000HZ,主動偵測模式的最大發射功率約90kw,主動模式的偵 測距離約5海里(9.3km),被動模式偵測距離約16km。SQS-56具有主動環場回聲(active panoramic echo )以及被動數位多波束指向(Digital Multi-beam Steering,DIMUS)監視模式,而SQS-56多數的信號處理功能都是在美國海軍標準電子模組計畫(Standard Electronic Module Program,SEMP )下完成。SQS-56採用單一陰極射線管(Cathode-Ray Tube,CRT)顯控台,並支持字母/符號顯示;此外,人機介面還能選配遠端顯示、麥克風/對講機(loudspeaker/ intercom )等。SQS-56聲納沒有SQS-26、53等大型聲納具備的遠距離操作能力以及多種操作模式,也不能同時以 主動與被動模式進行偵測。 SQS -56的操作頻率高於SQS-26、53,精確度較高且較不受淺海環境中各類干擾效應的影響,頗適合近岸作業但偵測距離較短,在大洋上的操作性能遠遜於 SQS-26、53,因此急需加裝拖曳陣列聲納以輔助長距離搜索;也由於SQS-56偵測距離短,不敷ASROC反潛火箭的偵測需求,因此派里級根本無加 裝ASROC的必要。 雷 松公司在1990年代推出了SQS-56的改良套件,包括改良SQS-56的聲納波形(包括使其能發射王魚避雷聲納的波形)以Motorolla 68000處理器為基礎的通用處理器、TMS 320信號處理器、彩色顯示器以及具有圖形處理能力的顯控台、以固態積體電路組件取代原本老舊的真空管組件等。在1990年代,美國海軍為12艘改良型派 里級(FFG-47、48~55、57、59、61)加裝與SQS-53C相同的SWAK淺水偵測套件以及王魚避雷聲納,提高淺水域操作性能,此一改良程序被稱為EC-10。 除了派里級之外,SQS-56聲納也 曾外銷義大利、南韓、摩洛哥、西班牙、澳大利亞、南韓等國,外銷型號為DE-1160,並衍生出可變深度聲納版本DE-1164(操作深度200m;如果同時裝備DE-1160與DE-1164,則兩者共用後端電子機櫃) ,一般型號操作頻率7.5KHz。 此外,雷松也曾推出DE-1160的低頻版本,稱為DE-1160LF(有艦體版與VDS版),操作頻率3.75KH,偵測範圍直達第一匯聚區。而小型化、以積體電路組件取代老 舊組件的版本稱為DE-1167,工作頻率12KHz。DE-1160B的功率輸出約12KW,DE-1160C增大了體積與功率(36KW)。總計DE-1160系列已知的型號包括: DE 1160、DE 11 GOB、 DE 1160B(重3536kg)、 DE 1160C(重4108kg)、DE 11 GOLF、DE 1160LF(重14254kg)、DE 1164/VDS(重28911kg)、 DE 1160LF/VDS(重39057kg)與DE 1167。。DE-1160在1977年開始服役,DE-1167則在1984年推出。
AN/SQS- 60中頻主/被動聲納/AN/SQS- 61高頻主動聲納 此為美國海軍搭配2000年代DDG-1000松華特級陸攻驅逐艦而開發的雙頻(高頻/中頻)主被動艦首聲納系統 ,由雷松公司主導開發,由AN/SQS- 61高頻主動聲納以及AN/SQS-60中頻主/被動聲納組成,整合於DDG-1000的AN/SQQ-90整合式水下作戰系統(Intergrated Undersea Warfare,IUSW)之中。AN/SQS- 61的精確度極高,主要用於迴避水雷;而AN/SQS-60主要用於偵測潛艦。 艦用被動拖曳陣列聲納: 拖 曳陣列聲納是一條連在鋼纜上的訊號接收陣列天線,由艦尾施放而拖曳在艦身後方。 拖曳陣列聲納最初起源於民營的石油業。在1950年代末期至1960年代初,美國切薩皮克設備公司(Chesapeake Instrument Company)首次嘗試 使用拖曳式的線性聽音列陣來接收海洋中的低頻地震回波,以尋找海底石油 來源,參與的石油業主包括西方石油公司(Occidental Petroleum)。此系統的聽音頻率極低,一般在120Hz以下,唯有線性拖曳陣列才能構成足夠的孔徑來接收。使用時,美國發現這種線性被動拖曳陣列能在遙遠距離截 獲潛艦發出的低頻噪音,遂引起美國軍方高度興趣。隨後,美國海軍於1960年代初期在青花魚號(USS Albacore AGSS-569)實驗潛艦以及艾森.阿倫級彈道飛彈潛艦約翰.馬歇爾號(USS John Marshall SSBN-611)上測試拖曳陣列;約翰.馬歇爾號的實驗性拖曳陣列是貝爾電話實驗室(Bell Telephone laboratories)在1961年製造。在1960年代,美國海軍首先在拉法葉級(Lafayette class)、富蘭克林級(Benjamin Franklin class)彈道飛彈潛艦上部署潛艦用拖曳陣列聲納;而水面艦用拖曳陣列聲納也在同時期發展出來。 拖曳式聲納的基本結構是一由條可彎曲的長管,通常長度達一公里,內含水聽器(hydrophones),是一種壓電元件(piezoelectric devices),能將海中壓力波動的機械波轉換為電子信號。在水面艦上,拖曳陣列聲納以浮力電纜(buoyant cable)放出,部署深度介於 100 至 500 公尺間。整條聲納陣列呈線性排列,各水聽器間距固定,使其能進行波束形成(beamforming),藉由建設性干涉(constructive interference)來判定信號方向。海軍用拖曳陣列聲納依照直徑與長度不同,還可分為較早出現的粗線型陣列(fat-line array,直徑可達 90 cm),或者之後出現的細線型陣列(thin-line array,直徑小於 50 cm)。細線型陣列在相同體積下可提供更長的陣列,用於探測長距離超低頻(10–100 Hz)的聲學信號。現代化的拖曳陣列聲納後處理系統已從早年的類比式轉為數位化,利用自適應濾波器(adaptive filters)去除背景噪音(如海洋生物活動、地震或潛艦以外的人造聲噪),能在50海里距離內實現誤差小於 1 公里的定位。由於海水中的聲速隨深度變化,系統會應用即時折射演算法(real-time refraction algorithms),根據不同水層的聲速變化進行修正。 拖曳陣列聲納堪稱美蘇冷戰期間反潛偵測科技的最重要發展之一。水面艦的固定式艦體聲納(hull-mounted sonar)在使用上有許多限制,首先常受船艦本身輪機或航行產生的流體噪音干擾,而聲波在海水不同溫層中(註)的傳播損耗也使艦體聲納有效探測距離縮短至數英里。敵方潛艦更會利用海水躍溫層的特性,改變深度躲藏在海水表面層與躍溫層交界以下,使水面船艦的聲納系統因為聲波折射而無法探測。 而拖曳式聲納就能避免上述問題,整個陣列部署到船體後方遠離船艦處,遠離了船艦自身機械噪音與船體切穿水面與螺旋槳推進器產生的亂流,工作環境理想得多;此外,拖曳陣列聲納還可改變部署深度,根據當地海水層的特性,選擇在最有利的深度上工作,以充分利用當地海洋生徐與傳播途徑(例如匯聚、海底反射等效果),盡可能延長聽音距離,或者部署到躍溫層以下來得到更清晰的信號。 核能潛艦持續運轉(包含蒸汽渦輪、減速齒輪與螺旋槳)的噪音中,不少座落於1KHZ以下的極低頻段 ,例如機電系統是50~60Hz左右,而螺旋槳則是10Hz或更低。低頻段在海水中傳遞距離最遠 ,損耗最低,利用海底匯聚效應(註)進 行多次反應,因此長距離反潛預警勢必仰賴對極低頻;若要有效截收這個頻段的噪音,聽音器的基陣就必須很長。傳統的固定式艦體聲納的基陣尺寸受到艦體平台尺寸制約,無法製造得太大; 而線性拖曳陣列聲納就不受艦體尺寸限制,天線孔徑長度幾乎不受限制,並且遠 離了船艦自身噪音,因此靈敏度與低頻操作能力都遠優於艦體固定式聲納。以艦首大型低頻陣列聲納的尺寸,工作頻段最多只能到約1KHz,且大概只能接收到第一 匯聚區 (約25海里)的信號;而拖曳陣列聲納視陣列長度,可接收第三匯聚區(75海里)以上的遠距離聲頻。 拖曳陣列聲納的纜繩技術也相當具有挑戰性, 因為整條拖曳纜繩長度極長,包括纜繩本身以及上面眾多水聽器,重量龐大, 航行期間纜繩的每一段都承受船艦拉力、海水阻力/海流力量而形成的強大張力,還有陣列本身的重量;如何能在船艦上順利施放與回收 這麼長的纜繩,並在長時間航行下不因強大的應力損壞或拉斷,對於收放繳車系統以及 纜繩本身都有難度。世界上最早期的拖曳式水聽陣列是1917 年的「電鰻」(Electric Eel),是一種由驅逐艦拖曳的原始水聽器鏈,依賴人工捲放並使用易於扭曲的電線導體;到 1950 年代以後,同軸電纜取代了導線,使資料可在無電磁干擾下遠距傳輸。而現代的合成纖維如戴尼瑪(Dyneema)可提供超過 10 公噸的拉力強度,此外拖曳陣列還會應用中性浮力模組(neutrally buoyant modules)來防止纜線部署後因本身的重量下垂、導致陣列變形影響聽音效果。 在部署拖曳陣列聲納之前,美國海軍艦艇是仰賴艦首聲納截聽直線傳播的信號,標定後再以最大射程一萬碼(近10km)以內的ASROC反潛火箭加以攻擊 。然而,1960年代後期,配備P-70反艦飛彈(北約代號SS-N-7,射程約65km)的蘇聯Project 670核能攻擊潛艦(北約代號查里級,Charlie class)出現後,蘇聯潛艦就有可能在第一匯聚區以外的距離上搶先對美國海軍船艦發射反艦飛彈,因此迫切需要延長水面船艦探測潛艦的距離。有了拖曳陣列聲 納,再加上載人反潛直昇機出現之後,水面艦艇能先以拖曳陣列接觸到起碼數十至數百公里外水下的潛艦,然後派遣直昇機前往接觸區域附近,利用聲納浮標和吊放聲納 進行精確鎖定,再投擲魚雷攻擊,整個攻擊距離是ASROC的好幾倍。因此拖曳陣列聲納與反潛直昇機的組合讓反潛艦艇的有效偵測/攻擊距離增加數倍,並且導 致ASROC反潛火箭開始式微。除了探測潛艦之外,拖曳陣列聲納自然也能探測其他水面船艦,利用匯聚區效應可探測距離200海里外的水面船艦,是水面船艦雷達的6、7倍。 當新一代潛艦靜音技術逐漸普及之際,拖曳陣列聲納的地位更形重要;包含輪機設施的減振浮筏、隔音屏蔽等,大幅削減了潛艦在較高頻段的鋒值噪音,而日漸普遍 的潛艦外部消音瓦,對於頻率1.4KHz以上的噪音(包含敵方主動聲納)有著 頗佳的吸收效率。靜音潛艦日漸普及,意味著偵潛難度越來越高,各型聲納對於敵方潛艦持續運轉噪音的偵測效能直線下滑;不過相形之下,現階段各類降噪或抑制 手段,仍很難有效抑制極低頻段(尤其是推進器規律運轉的窄頻帶低頻噪音)的噪音輻射,在各類聲納感測器之中,仍屬基陣最大的拖曳陣列聲納,比較能截收這類 的極低頻/窄頻信號。 此外,對於採用電力推進、靜音性佳、在航行中途採取慢速前進的魚雷而言,也只有基陣長、靈敏度高的托曳陣列聲納能有效提供早期預警。 不過拖曳陣列聲納也有許多先天限制。首先,部署拖曳陣列聲納需要一段時間,當拖曳聲納釋放出來後,艦隻的航速與戰術運動都受到很大的限制, 此時不可能進行劇烈加速或轉彎。線性拖曳陣列作業時必須維持直線才能獲得最好的偵測效果(陣列上各聽音單元的距離與相對位置需維持一定,避免信號扭曲失真 ),但陣列本身是柔性的,運作時容易因艦艇轉向運動與洋流影響而擺動,而長基陣上各點接收到信號的時間也不盡相同;一旦船艦轉向,柔性的拖曳陣列聲納也會跟著彎曲,至少要數分鐘才能重新拉直,期間彎曲變形的陣列的效能就會大幅減低。為了克服拖曳陣 列變形的問題,對應的措施包括改變船艦運動、改變拖曳聲納部署深度來避開某些速度高的洋流等,或者可在拖曳陣列本身裝置專門測量陣列形變的裝置,把測得的 形變量輸入後端系統來盡可能還原失真。因此,拖曳聲納先天上標定目標角度、位置的精確較差,發現目標信號之後仍須透過其他載台前去做精確定位,例 如派遣反潛直昇機前去以以吊放聲納或聲納浮標確認;而拖曳陣列聲納無論是聽音器陣列本身的製造以及後端信號處理技術,都是門檻極高的領域。 此外,拖曳陣列聲納屬於一維的水平線性陣列,垂直向的 孔徑極低,很難獲得垂直增益,因此光靠天線物理特性很難獲得目標深度的資訊;而使用傳統聲壓方式測量的單一線性拖曳陣列聲納,也很難直接判斷目標在聲納陣 列的左側或右側(這需要透過同時部署雙線性陣列聲納,或使用「品」字型的聽音單元計算聲波抵達每個元件的時間差來計算目標方位)。在淺海使用拖曳聲納時, 由於水深有限,拖曳聲納很容易觸及海底導致 硬體受損,因此只適合在較較深的水域使用。 綜合以上,拖曳陣列聲納因為基陣長且受船艦自噪干擾較低,適合用於深水域、長距離探測。但拖曳陣列聲納並非無時無刻都在工作,且部署施放需要時間,部署時船艦運動限制多,而且先天上探測方位的能力較差。而傳統艦體聲納雖然能探測的波長受限、工作距離短,且易受艦體自噪干擾,但隨時都可以使用,而且分辨方向的能力較佳。在近距離(距離船艦20公里以內)需要迅速反應並判斷威脅方向的場合,艦首固定式聲納是拖曳陣列聲納所無法取代的。 在使用上,大型的低頻/極低頻音響陣列利用海底匯聚效應等間接傳播通道,理論上可以探測上百甚至上千海里外的特定噪訊,不過實際作業非常耗時;聲納系統需 進行長時間的監聽,後端信號處理系統從大量海洋背景雜音中進行過濾與積分,粹取特定頻率的 低頻信號(例如某種已知型式的船艦、潛艦俥葉聲),而每一次窄頻搜索作業都只能針對某一種特定頻率進行監聽與分析;因此,利用低頻/極低頻探測遠距離外的 目標時,所需的時間往往以天來計算,而如果沒有已知的目標聲學特徵紀錄,長距離搜索作業將更加事倍功半。 更何況,如果還要對目標進行動態分析(Target Motion Analysis,TMA,被動式聲納透過敵我之間相對運動的角度差計算出目標距離的技術,因為被動聽音只能獲得與目標信號的角度,不像主動聲納能直接取 得與目標之間的相對角度與距離;TMA作業會需要船艦改變航向、分析同一個目標聲源在不同作業航向的方位資料來計算出大致距離)來判斷距離,作業的時間也 會增加。 傳統的單線式低頻拖曳陣列聲納 由無指向聲壓性聽音器構成,以聲波訊號依序抵達陣列各單元的時差(Time Difference of Arrial,TDOA)來計算信號來源距離陣列的角度 ;然而,當聲波信號來自於與線性陣列為軸向的圓椎面時,陣列上聽音單元的響應完全一致,這使得傳統單線拖曳陣列聲納在艦尾一定角度內,會有無法辨識目標在左、右側的問題。為了克服這個問題,當拖曳陣列聲納接觸 目標之後,艦艇需要轉向再次進行監聽;在新的航向上,拖曳陣列聲納定出的兩側信號中,一定有一個方位會與在原本航向定義的方向重疊,而這就是目標的正確方向 ;這意味著如果只有單一線性陣列聲納,就需要花費雙倍的時間來確認目標的航向 。若干大型拖曳陣列聲納如美國部署在AGOS海洋監視船上的SURTASS拖曳陣列聲納,採用兩條線性陣列,分析聲源抵達兩陣列的時間差來計算目標方位,不過這類採用兩條以上陣列的系統佔用體積龐大,不適合空間有限的第一線作戰艦艇與潛艦。 1990年代以後,若干新技術使單線拖曳陣列聲納能夠直接判別目標方位,而不需要仰賴船隻改變航向進行第二次偵測,例如採用三個排成品字型的聽音器單元, 透過信號抵達各聽音器的時間差來判斷方位。 隨著潛艦靜音技術日趨進步,以往純靠被動陣列聲納系統探測潛艦的效能與距離已經大打折扣。柴電潛艦潛航時只靠電機慢速推進,不像核子推進系統反應器、蒸汽渦輪熱機發出相對明顯的音響信號;而且柴電潛艦通常在近海區域活動,受到近岸大量地形雜波的干擾,而且該處由於水深過淺,只能靠直接聲學通道進行探測,距離大受限制。又,隨著潛艦外部敷設消聲瓦日益普及,一般中頻主動聲納的探測距離顯著衰減,而反潛技術的對策之一,就是結合低頻主動聲納與低頻被動陣列聲納進行探測。 隨著1990年代靜音化柴電潛艦日益普及擴散,純粹的被動聽音反潛作業日漸困難,1990年代以來世界各主要海軍都積極發展由中/低頻主動聲納搭配被動拖曳陣列聲納聯合作業,由主動聲納拍發,由聽音性能較好的拖曳陣列聲納負責接收。如此,就能克服傳統被動拖曳陣列聲納只能被動聽音且難以迅速判斷目標方位的問題,又保有拖曳陣列聲納基陣長、遠離艦體自噪、部署深度自由的優勢。主動聲納能與被動拖曳陣列聲納可以整合成一體,隨著聲納信號處理技術進步,還發展出由多個不同位置聲納系統進行「雙基作業」(bistatic operation) 甚至「多基作業」(multistatic operation),例如以艦體主動聲納、可變深度聲納(VDS)、拖曳式進行拍發,再由被動陣列接收。而直升機的吊放式聲納也可參與多基作業,由吊放聲納拍發,然後以一條(或多條)拖曳式陣列接收。透過雙基/多基作業,單一主動聲納源由多個被動拖曳聲納截收,可大幅提高對水下目標定位的精確度(傳統單一線性陣列拖曳聲納必須靠著船艦運動調整聲納方位,比對多次不同接觸才能計算出目標方向等動態)。在多基作業下,以直昇機吊放聲納負責拍發時,以被動拖曳聲納接收的船艦平台不會暴露位置,敵方潛艦無法單憑主動聲納來源方位來迴避或反擊。上述這些主動聲納與被動拖曳陣列聲納的組合,顯著強化了船艦的對潛效能,甚至足以奪回水面反潛艦艇在靜音潛艦普及後喪失的先看/先發優勢,在敵方潛艦能打擊水面 船團之前先發現它。 SQR-14/15被動拖曳陣列聲納 SQR-14名為過渡性拖曳陣列監視聲納(Interim Towed Array Surveillance System,ITASS),而SQR-15則為SQR-14衍生而來的聲音監視系統(Sound Surveillance System,SOSUS)之後備系統,兩者均為美國海軍最早的長距離拖曳陣列聲納,其中SQR-14於1975年6月推出 ,而SQR-15的原型系統則在1973年起由遠洋掃雷艦敏捷號(USS Alacrity MSO-520)以及保證號(USS Assurance MSO-521)上進行測試。SQR-15偵測距離可達第二 匯聚區,但是當時沒有一種艦載武器可以直接攻擊這個距離的目標,因此此系統的操作必須交由更高的指揮階級而非母艦本身,因此SQR-15被視為是戰略性的偵測系統而非戰術性。 美國海軍開始測試SQR-15之後,安裝的艦艇總是能成為艦隊中第一個發現潛艦的單位 為了運用SQR-15,美國海軍使用比SH-2更大SH-3海王反潛直昇機,組成LAMPS-2反潛系統。此系統只能算是在真正具備視距外反潛能力的LAMPS-3出現前的過渡性系統,因此知名度較低。 SQR-18被動拖曳陣列聲納
SQR-18拖曳陣列聲納的絞車。 SQR-18是護航拖曳陣列聲納感測器(ETAS)計畫所發展的過渡性護航拖曳陣列聲納(Interim Escort Towed Array Surveillance System,IETASS), 是SQR-14/15之簡易替代品,長度與偵測距離皆不如後兩者,接收範圍僅能達到第一 匯聚區 (最多約40~50km),並使用NC-2描跡裝置進行人工目標動向計算(Target Motion Analysis,TMA,被動式聲納透過敵我之間相對運動的角度差計算出目標距離的技術,因為被動聽音只能獲得與目標信號的角度,不像主動聲納能直接取 得與目標之間的相對角度與距離)。SQR-18的研發工作從1968財年開始,由伊多公司公司(Edo Corporation)研製, 第一套帕特森實驗性陣列(Patterson Experimental Array,PEA) 在1972財年訂購,1973財年正式頒佈系統需求。在1974年8月,美國海軍訂購首批兩套IETASS(SQR-18)陣列,並部署在諾克斯級(Knox class)巡防艦上測試;IETASS經過海上測試之後,美國海軍在1975財年建立護航拖曳陣列聲納( Escort Towed-Array Sensor ,ETAS)計畫,也就是量產型的IETASS,型號為AN/SQR-18A。AN/SQR-18A的量產工作從1978年 春季展開,後續改進計畫在1981年4月展開,在1987年時部署了大約40套,主要裝備於諾克斯級(Knox class)巡防艦與部分派里級巡防艦上,首艘部署SQR-18進行測試的是諾克斯級的USS Moinester(FF 1097)。 AN/SQR-18聲納的 每各子陣列含有8個聽音模組,共計有32個隔震聽音器。早期的SQR-18由長1706公尺的鋼纜拖曳於366公尺的深度,量產型的SQR- 18A則縮減至1524公尺,SQR-18A(V)1更縮短至730公尺。而改良後(V)2型的纜繩長度則為1611.2公尺,裝置於諾克斯級巡防艦(搭 配SQS-35主動變深聲納)以及部分派里級飛彈巡防艦上。SQR-18聲納為LAMPS-1反 潛系統的一環,此系統的反潛直昇機為SH-2F海妖式;在LAMPS-1系統中,艦上的AN/SQR-17(V)2與A(V)2聲納信號處理器可同時處理來自AN/SQS-26艦首聲納、SH-2F直昇機的聲納浮標以及AN/SQR-18拖曳陣列聲納的信號。早期的AN/SQR-18(V)1需要與SQS-35可變深度聲納共用部署系統,而AN/SQR-18(V)2則擁有自己的拖曳處理系統,可以獨立運作。 雖然SQR-18偵測距離不如一些陣列較長的拖曳聲納系統,但也由於長度短,在較高的作業速度下比較不容易發生扭動,美國海軍甚至曾測試以30節的速率拖曳SQR-18而沒有毀損。 在1990年代,Edo進一步自費發展SQR-18(V)3,以商規現成組件(COTS)全面升級舊有系統,後來 發展成了全新的主動低頻拖曳陣列聲納系統(Active Low Frequency Towed Sonar,ALOFTS,詳見新加坡可畏級巡防艦一文),用於外銷市場 。
SQR-19被動拖曳陣列聲納 相較於過渡性質的SQR-14/15/18,AN/SQR-19是美國海軍第一種正式的拖曳陣列聲納,以SQR-18為基礎進行開發。SQR-19始於戰術拖曳陣列聲納系統(Tactical Towed-Array Sonar,TACTAS)計畫,這是AN/SQQ-89反潛作戰系統的子項目,是基於先前護航拖曳陣列聲納(ETAS,AN/SQR-18A)進一步發展而來。AN/SQR-19的研發工作始於1976年,由美國西方電氣公司(Western Electric Company)、古爾德(Gould lncorporation)公司和通用電氣(GE)公司合作開發,第一部原型在1982年安裝於美國海軍 史普魯恩斯級驅逐艦穆斯布魯格號(USS Moosbmgger DD-980)號驅逐艦上進行測試,1983年投產,第一部量產型於 1985年7月交付美國海軍。 SQR-19的主要功能包括對潛艦遠距離偵測、追蹤與識別 ,具備目標動態分析(TMA)能力(例如偵測敵艦深度、艦艏方等),還可探測水溫(需要根據水文狀態調整聲納設置),此外也可接收遠處水面艦艇的噪音,最大偵測距離可達第三匯聚區(約150~200km)。相較於 先前AN/SQR-18的類比式信號處理技術,AN/SQR-19的聲學硬體以及後端信號處理則完全改為數位化形式。爾後 SQR-19成為AN/SQQ-89(V)艦載整合反潛作戰系統的一環,主要擔負長距離初期探測、定位,並引導SH-60B反潛直昇機快速前往目標區域, 利用機上的吊放聲納、聲納浮標進行精確定位,用資料鏈將聲納訊號回傳母艦,並視情況用機載反潛武器實施攻擊,或由母艦ASROC等遠程反潛武器加以攻擊。 AN/SQR-19與艦上的艦首聲納形成互補,低頻的SQR-19負責遠程偵測預警,中/高頻的艦首聲納則擔負中/短距離偵測、追蹤、精確識別、主動標定 與射控攻擊。SQR-19裝設於美國海軍提康德羅加級、柏克級、史普魯恩斯級以及部分派里級等艦艇上,並在1987年批准外銷,首先向澳大利亞、加拿大和 西班牙等國出口。依照1987年單價,每套SQR-19價格為900~1000萬美元。 AN/SQR-19由艦內後端電子設備與水下系統構成,水下系統包括聽音陣列、拖曳纜繩、收放絞車及控制系統等,艦內後端電子設備則包括信號處理器、數據 處理裝備、顯控台等。早期型SQR-19的聽音陣列長約400英尺(約121.92m),聽音陣列直徑8.25cm;拖曳纜繩長600英尺(約1706.88m),直徑9.5mm,最大拖曳深度約1200英尺(365.76m),採用臨界角拖曳方式。聽音陣列由8個聽音組件、3個隔振組件、1個遙測驅動組件和尾部穩定結構件組成;8個聲學組件中,包括四個低頻組件 (LF,1000~5000HZ)、兩個中頻組件(MF,5000~15000HZ)和兩個高頻組件(HF,15000HZ以上);每個聲學組件長 12m,由48個等間距的水聽器構成,共可形成43道接收波束;聽音基陣內設有前放、濾波、多路復合、數/模變換等電子組件,負責處理接收到的訊號,此外 有用於監測陣列方向、部署深度和環境溫度的方向/深度/溫度模組(Heading/Depth/Temperature Module,HDTM);遙測驅動組件則用遙測發送器,把聲納陣列收集、經過處理的訊號,透過拖曳纜線內的同軸電纜傳回艦上,同時也負責接收母艦傳來的 指令。後甲板裝有陣列收放絞車與相關操作設備,重7620kg。在船速12至15節、海象四級以內的拖曳情況下,SQR-19的被動探測距離可達70海里 (127km);在船艦航速18節時,SQR-19仍可使用。面對10HZ極低頻目標時,SQR-19可達成遠程預警作用但無法辨認方位,對1KHZ頻率的目標方位精確度則在2度以內,足以引導友軍 直昇機或反艦飛彈加以攻擊。後端控制方面,早期型SQR-19使用一具UYQ-21/OJ-452顯控台、四具UYK-20電腦以及兩具UYS-1聲納信 號處理器,全系統僅需二名人員操作;這些設備的平均故障間隔時間大於600小時,排除故障平均維修時間小於20分鐘。其中,AN/UYK-20電腦用於分 析聲納數據與故障檢測,顯控台能同時顯示反潛直昇機與艦首聲納的資訊。SQR-19擁有數位化的聲納信號顯示,使用直觀的「瀑布式」顯示,其中頻率為橫 軸、時間為縱軸,呈現出特定頻率噪音所形成的直線,也能直覺地看出移動目標的都卜勒頻移;而過去的聲納如SQR-18只能透過數字顯示當下不同頻率聲學信 號的強弱,需要更進一步的人工辨識作業來分析信號。 1980 年代中期為了偵測勝利三級等更加安靜的新一代蘇聯核能潛艦,SQR-19的長度增至800英尺(243.84m),增加八個極低頻(VLF,小於1000HZ)聽音陣列。改良 型的SQR-19以UYH-3資料儲存器取代原來的UYH-2,1991年出現的SQR-19B則將電腦換成了UYK-44。
AN/SQR-20(TB-37U)整合多功能拖曳陣列聲納系統(MFTA)/輕量化寬頻可變深度聲納(LBVDS) 配合1990年代開始發展的DD-21(DD(X),目前稱為DDG-1000)陸攻驅逐艦,美國海軍也開發既SQR-19之後的新一代主/被動拖曳陣列 聲納系統,包括AN/SQR-20(2013年9月起改稱為TB-37U)整合多功能拖曳陣列聲納系統(Multi-Function Towed Array,MFTA),以及擁有主動模式的輕量化寬頻可變深度聲納(LBVDS,日後正式編號為AN/SQS-62)。SQR-20使用直徑為三吋的聽 音陣列,聽音覆蓋能力優於SQR-19。AN/SQR-20(TB-37U)被整合入DDG-1000松華特級陸攻驅逐艦的AN/SQQ-90反潛作戰系 統、給柏克級/提康德羅加級神盾艦艇使用的AN/SQQ-89(V)15反潛作戰系統,以及LCS多功能近岸戰鬥船艦的反潛任務套件。 LBVDS的基礎研發工作由洛馬集團海事系統分部作為主承包商(其他主要供應 商包括L3 Chesapeake Science Corp等),從SC- 21/DD-21計畫時代就是水下偵測系統的開發重點,其專為偵測低速航行的靜音潛艦而設計,處理的聲音頻寬涵蓋中頻與高頻(1~7kHz),信號產生與 處理範圍則涵蓋1~6kHz,並採用高能量密度換能器(Transducer材質),在面對淺水域不同溫曾的低都卜勒效應目標時,主動偵測模式與識別的效 率可改善20~30%,並具有可靠度、低虛警率與自動化(僅需一人操作)等出色的特性。LBVDS作業時能與MFTA協同操作, LBVDS變深聲納發射主動聲波信號,並由MFTA拖曳陣列聲納負責接收回波,洛馬宣稱這套組合效能超過現有SQR-19的十倍。洛馬早在1996年就收到 LBVDS的系統驗證展示合約,2001年完成了系統原型,並於2002財年展開海上測試,緊接著在2003與2005財年進行後續測試;由於 AN/SQR-20(TB-37U) MFTA的研發進度較為緩慢,因此LBVDS的初期測試是搭配修改後的TB-29A潛艦用拖曳陣列聲納充當接收器。L3 Chesapeake Science Corp負責生產拖曳陣列聲納整合產品團隊遙測單元(Towed Array Integrated Product Team Telemetry)以及其他關鍵硬體組件。 依照2005年2月的規劃,美國會在 2007財年編列第一套量產型LBVDS的預算;除了DDG-1000之外,LBVDS/MFTA也是LCS多功能近岸戰鬥船艦的反潛偵測套件。在 2008年6月,下旬,消息傳出AN/SQR-20準備投入生產,洛馬集團獲得了價值1000萬美元的相關合約。從2008年起,洛馬集團陸續獲得多筆關 於AN/SQR-20的生產、壽期支持相關合約,2013年9月30日的合約起改稱為TB-37U;2014年5月19日獲得的3180萬合約包含修改、 運作9套TB-37U以及相關設備等,2015年5月25日獲得2730萬美元的選擇權產製7套TB-37U(包含美國海軍自用FMS軍售管道銷售給日本 的)。 AN/SQS-62雙模式陣列傳輸任務系統(DART MS)(2022年3月底取消)
(上與下)AN/SQS-62雙模式陣列傳輸任務系統(DART MS)的第一套預量產 原型,由雷松測試完成後在2018年11月交付美國海軍,進行發展與作戰測試 評估(DT/OT&E);然而,最後並未通過。
在2015年,美國海軍發出了LCS反潛套件的可變深度聲納(VDS)系統的需求徵詢書(RFP)。LCS反潛任務模組的艦載聲納包括可變深度聲納(VDS)以及多功能拖曳陣列聲納(Multi-Function Towed Array,MFTA);概念展示階段時,LCS使用英國Thales的Type 2087型主/被動拖曳聲納作為VDS,而MFTA則使用與伯克級、松華特級相同的拖曳陣列(即AN/SQR-19的線性陣列)。
在2015年7月30日,美國海軍LCS任務套件項目主管(LCS Mission Module Program Manager)Casey
Moton上校表示,LCS的反潛任務套件重量過重;LCS的每一種任務套件總重是105噸,而現有的反潛套件(概念測試系統)超過了這個上限。概念測試階段使用的Type
2089 VDS聲納以及SQR-19的線性陣列都是現有成熟系統,硬體難以大幅度修改減重。因此,美國海軍與先進聲學概念(Advanced Acoustic
Concepts)、L-3通信(L-3
Communications)以及雷松(Raytheon)等三家公司簽署合約進行研究,尋找減輕系統重量的方式,初步概念包括修改這些感測器、使用更輕量的部署收放系統等。 DART MS同一套拖曳部署系統就兼具主/被動探測模式,能輕易整合在兩型LCS以及後續的星座級(Constellation class)飛彈巡防艦(即FFG(X))上,具備模組化、可擴充/裁減、易於裝卸等特點。DART的部署系統包括一個拖在後頭的拖曳體,以及連接拖曳體的纜繩。 從2016年底至2017年5月,LCS首艦自由號(USS Freedom LCS-1)趁著例行維修工程期間加裝MFTA拖曳陣列聲納,在2018財年進行測試。 在2018年7月17日,美國海上系統司令部(NAVSEA)宣布雷松的DART達成重要測試節點。首先,DART MS在佛羅里達的大西洋大學海港分部海洋機構(Florida Atlantic University Harbor Branch Oceanographic Institute)的水中測試設施中,在LCS人員操作下,成功完成為期10天的測試;接著,配套的可變深度主動陣列聲納在紐約的德雷斯登(Dresden, NY)的海軍西尼卡湖聲納測試設施(Seneca Lake Sonar Test Facility)完成一項測試,這是此型主動陣列聲納首次在開放水域進行測試(包含全功率輸出),使美國海軍研發團隊更瞭解此系統在實際作業環境下的性能表現。通過這項里程碑之後,雷松會在2018年秋季將三個該公司開發的任務模組整合到DART系統中,並在2019年初在大西洋水下測試評估中心(Atlantic Undersea Test and Evaluation Center)進行測試。 第一部AN/SQS-62預量產型在2018年出廠,在2018年11月交付美國海軍,從2019年9月由第二艘自由級LCS沃茲堡號(USS Fort Worth LCS-3)進行發展與作戰測試評估(Developmental/Operational Test & Evaluation DT/OT&E),原訂在2020年8月完成(但最後未能達成進度)。美國海軍原訂在2020年3月下達AN/SQS-62的量產合約。
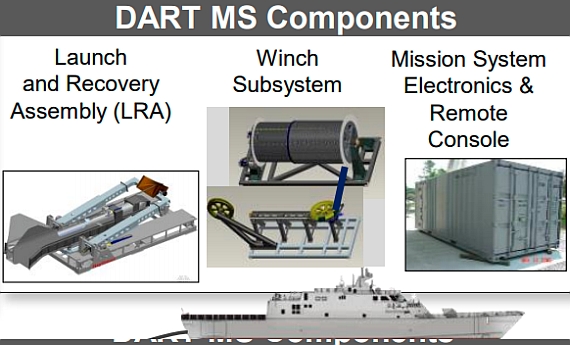
DART MS附屬的裝備,包括施放與回收總成(LRA)、絞盤子系統、任務系統電子與遠隔顯控台。
DART MS的發射陣列總成,包含MFTA拖曳聲納陣列、連續主動聲納、拖曳體子系統等。
DART MS的拖曳體子細系統,負責控制部署深度。
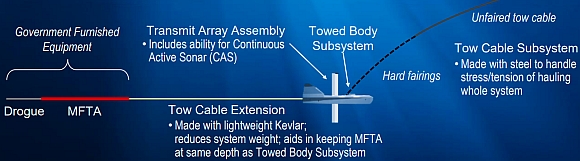
DART MS單一拖曳陣列反潛系統(DART MS Single Tow ASW System)由可變深度聲納(VDS)、TB-37U多功能拖曳陣列聲納(MFTA)組成。DART的發射陣列總成(Transmit Array Assembly)包含MFTA被動拖曳聲納陣列(此為政府供應項目)以及連續主動聲納(Continuous Active Sonar,CAS);MFTA連接著用來控制部署深度的拖曳體子系統(Towed Body Subsystem),拖曳體透過一段延伸段拖曳纜繩(Tow Cable Extension)連接MFTA,這段纜繩由輕量化凱夫勒(Kevlar)材料製造。而拖曳體本身則透過一段鋼製纜繩與艦上的絞盤、收放系統連接。DART MS附屬的裝備包括施放與回收總成(Launch and Recovery Assembly,LRA)、絞盤子系統(Winch Sybsystem)、任務系統電子與遠隔顯控台(Mission System Electronics & Remote Console)。 部署在兩型LCS的DART MS系統完全相同,不需要針對不同平台進行客製化修改(自由級的艦尾拖曳聲納艙門靠近水面,而獨立級的艦尾收放艙門距離水線有18公尺距離)。 在2021年9月,美國海軍暫停了DART的測試工作,因為發現在海中部署時DART遇到流體動力穩定性問題;最初美國海軍跟雷松打算以被動控制方案來解決這個問題,但最後瞭解他們必須發展主動控制系統。在2021年底,DART送到馬里蘭州海軍水面作戰中心卡迪洛克分部(Naval Surface Warfare Center Carderock Division in Maryland)的空蝕通道(cavitation channel)進行流體測試,在2022年1月底完成,雷松與美國海軍利用這些參數來設計新的主動控制方案,希望在2022年5月恢復DART的測試工作;一旦通過測試,DART就能進入生產階段,不至於產生額外費用,並且專注於水下探測性能的測試。除了部署時的穩定性問題外,DART陣列的水聲換能器在測試時,也發現性能與可靠度不如預期。 DART拖曳部署系統穩定性問題的原因,很大一部份是來自於先前為了配合LCS反潛套件的減重需求;為此,美國海軍對船艦平台以及DART的部署/收放系統進行不少設計修改,成本不低,然而實際測試之後卻發現,為了減重而設計的框架與部署系統,導致DART在部署時不穩定。 在2022年3月28日,美國國防部公布2023財年的預算申請書,其中海軍預算書申請將此時現役9艘自由級LCS全數除役,而且取消了LCS反潛套件項目,集中資源為接下來接替LCS的星座級飛彈巡防艦發展反潛系統。美國海軍主管預算的助理部長John Gumbleton少將表示,LCS的反潛套件遇到許多困難,效果不好;所以美國海軍決定將資源用於後續(星座級)巡防艦的反潛系統,這才是真正理想的反潛作戰平台,估計第四艘星座級巡防艦就會擁有完整有效的反潛作戰能力。在2022年3月29日,智庫機構Hudson Institute的專家Bryan Clark表示,自由級的設計並不能良好地整合VDS可變深度聲納。 在2022年2月上旬,美國海軍海上系統司令部(Naval Sea Systems Command,NAVSEA)發佈一項信息徵詢書(Request for Information,RFI),為星座級巡防艦徵求可能的可變深度聲納系統(VDS),其中要求系統已經經過服役操作驗證,並能整合到AN/SQQ-89反潛作戰系統中,且交付船廠日期(In-Yard Need Date ,IYND)是2023年11月,以趕上星座級首艦(FFG-62)裝艦,預計此時FFG-62的技術完成度(Technology Readiness Level ,TRL)達到9以上。 在2022年3月29日,美國海軍證實,會購買Thales的CAPTAS-4主/被動拖曳陣列聲納系統作為星座級巡防艦的VDS系統,並取消由雷松負責的AN/SQS-62 DART聲納系統(TB-37 MFTA拖曳陣列維持不變)。美國海軍無人與小型水面作戰船艦項目辦公室(Program Executive Officer for Unmanned and Small Combatants)主管卡西.莫頓少將(Rear Adm. Casey Moton)對防務新聞(Defense News)透露,美國海軍對於AN/SQS-62的研發情況十分憂慮,包括DART的研發工作、隨後量產與性能測試等各種風險,以及星座級巡防艦正在進行中的設計程序、很難承受額外的延誤風險;此時星座級正準備進入關建設計審查(Critical Design Review,CDR)、生產整備審查(Production Readiness Review,PRR)等。卡西.莫頓少將表示,美國海軍與雷松測試幾種針對DART的改進構想後,發現這些設計並沒有產生預期的改進,必須進行更複雜的設計修改才可能滿足需求,大大增加了開發風險以及不確定性。
註:SOFAR聲學通道/匯聚效應 第二次世界大戰期間,美國與蘇聯科學家分別發現,大洋深處有一些深海聲學通道(Deep Sound Channel,DSC),可以讓聲波傳得很遠,傳播數千公里而不減弱。 海洋中的聲學傳遞特性非常複雜,尤其是在高緯度地區(High North);由於溫度、鹽度與壓力,使得海水隨著深度分成多層,聲波通過每層的交界時就會像光線穿過稜鏡一樣產生折射。 海洋最上層的表層混合層(surface mixed layer)受風浪攪動,使聲音能快速傳播,但氣泡與亂流也會導致聲學信號散射;其下為的躍溫層(thermocline)溫度急遽下降,使聲波路徑向下折射,將海洋表層較暖的混合水體與下方較冷、穩定的深層水體分隔開來。躍溫層的深度會隨季節及不同海域而顯著變化。在躍溫層之下(深度約300至500公尺)是深層散射層(Deep Scattering Layer,DSL),此區域充滿海洋生物,且會擴散回波,尤其在黎明與黃昏時分。而更深處就是深海聲道(DSC)。在反潛作戰(Anti-Submarine Warfare,ASW)展開前,通常會利用拋棄式測溫深儀(Expendable Bathythermograph,XBT)或導電度–溫度–深度傳感器(Conductivity–Temperature–Depth ,CTD),對該水域的躍溫層實際深度進行測量;因為躍溫層的細微變化,就可能極大地影響聲納的探測距離。 經過理論分析,深海聲學通道的大致原理是因為水下聲速受水層溫度、壓力、鹽度等情況變化,溫度越低則聲速越慢,壓力越大則聲速越快;這會使聲波在水下傳遞的方向產生變化,因為聲學信號在介質(如海水)中傳播時,傳播路徑是由聲速較高的方向朝聲速較低的方向彎曲(即折射)。在海面以下的某個深度以內,由於海水溫度逐漸降低(因為逐漸遠離太陽照射的深度),聲速逐漸變慢;然而,隨著海水深度增加,水壓與鹽度也在增加。因此到某個深度以下,海水聲速反過來是隨身度增加而提高。 而在聲速隨深度變化反轉的深度(即聲速低谷區),就是聲學信號傳遞最遠、損耗最小的通道;在此深度以上的海水層是水深越深則聲速越慢(所以聲波傳遞是向下折射),以下的海水層則是水深越大則聲速越快(所以聲波傳遞是向上折射)。所以,聲學信號在此一深度上下一定的範圍內,就能直線傳播,不會因折射而向上碰觸海面、或向下海底反射,傳遞路徑相對最短且免除反射能量損失,可以傳到很遠的地方。這個聲速低谷深度的聲道軸通常存在深海聲學通道(DSC),又被稱為「聲固定與測距通道」(Sound Fixing and Ranging Channel,SOFAR)。海中的大型鯨魚溝通時,就會利用SOFAR通道。 深海聲學通道在中緯度地區時,約位於海面以下600至1200公尺深處,在高緯度寒冷極區則較相對淺,在熱帶則更深。以北大西洋為例,SOFAR通道深度約是水下1000m左右;而高緯度地區海域表層溫度遠低於深海水溫,使得形成SOFAR通道的聲速低谷區的深度相應較淺,與大多數軍用潛艦的典型活動深度吻合,能輕易使用該處的SOFAR聲學通道。 也因為聲波在SOFAR通道能傳遞很遠,會聽到整個海洋的聲音,因此又發展出低頻分析和測距(LOw Frequency Analysis and Ranging,LOFAR)技術,將船艦、潛艦運轉產生的規律低頻噪音(主要是螺旋槳推進器噪音)從複雜的海洋背景雜音中分析出來。早期SOSUS音響監聽系統都以大量繪圖機,將接收到的信號頻率不斷打印在紙上(橫軸視頻率)。如果知道特定型號船艦的螺旋槳聲噪的頻率(取決於轉速),就設定特定的偵測頻率;如果打印機產生的圖表在特定頻率出現黑點形成直線,就代表有此一頻率的聲源(特定型號船艦)出現;而利用不同方向的SOSUS陣列對同一音源信號的交叉比對,就能計算出目標大致方位與距離。
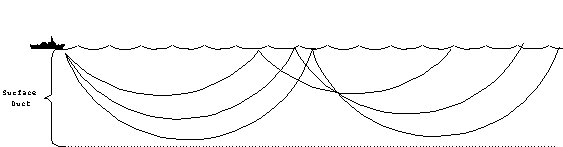
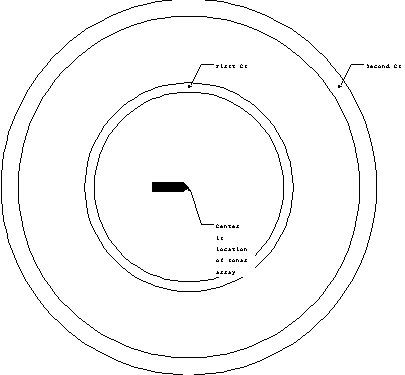
(上與下)聲波在海中透過深海匯聚效應,在一定的距離形成匯聚區(CZ),而拖曳陣列聲納 就透過匯聚效應探測數十甚至數百公里以外的聲學信號。然而,每個匯聚區寬度只有5到6海里寬, 只有正好處於聲源匯聚區的「窄圈」內才能聽到聲學信號。
而科學家也發現了深海中聲速對應深度變化反轉,還會帶來匯聚效應(Convergence)。比SOFAR通道往上的水層中,聲學會往下傳遞(聲速隨著水深增加而減低),經過SOFAR通道以下就會向上反轉(此處聲速隨著水深而增加),而這些反轉的能量會回到海面。在大西洋上,聲波會在3600至4000公尺的深度附近反轉向上,並在距離聲源約25到30海浬的距離外碰觸海面而形成第一次匯聚,稱為第一匯聚區(First Convergence Zone)。第一匯聚區的聲波到海面後反射後往下然後再度往上,依序形成第二、第三匯聚區,每個匯聚區間隔都大約是25至30海里。 以北大西洋的水文環境為例,典型的第一匯聚區出現在聲音源外的30~33海里處,第二匯聚區出現在第一匯聚區的兩倍距離(60~66海里),第三匯聚區以此類推出現在三倍距離(90~99海里),每個匯聚區間隔大致60~70km;而在地中海,每個匯聚區的間隔就相對較短(約30至45km)。 每個「聲學匯聚區域」(Convergence Zone,CZ)的寬度只有匯聚區到聲納之間距離的5~10%(大約5至6海里寬) 。因此,聲納設備必須剛好位寬度僅5到6海里的「窄圈」範圍內,才能聽到匯聚的聲學信號;隨著目標與探測船艦相對運動,目標很快就會離開匯聚區的探測窗口。第一匯聚區寬度約2~7km,第二匯聚區寬度約4~14km。 由於水聲在傳遞途中會被海水吸收損耗,頻率越高則損耗越快,因此只有頻率夠低的聲學信號才會以匯聚方式傳播。以大西洋的水文環境而言,只有頻率低於3.5KHz的聲音的傳播距離足以達到匯聚區 。3.5kHz以下的低頻聲學信號由於能量不易被海水吸收,通過三個匯聲區仍可能經由被動聲納辨認出來,因此被動聲納通過三次匯聚效應,有機會偵測到100浬以上目標。而主動聲納拍發由於包括發射以及反彈的雙倍距離損耗,通常很難偵測到第一匯聚區以外的目標。 一艘航速28節的潛艦,只需要8至9分鐘就可以通過匯聚區的5到6海里寬度,使得聲納失去接觸。因此,當水面船艦用聲納探測到潛艦之後,若想讓潛艦持續保持在匯聚區的接觸範圍內,必須立刻推算出目標航跡,保持與目標相同的方向與航速移動,而這在戰術上不見得容易達成;首先,水面船艦只有基陣長的拖曳陣列聲納才能探測匯聚傳播的低頻信號,只有已經部署拖曳陣列聲納的船艦才能利用匯聚區探測,而且操作拖曳陣列聲納的船艦的航向與航速都會受到限制(航速太快則流體噪音越大、干擾拖曳聲納運作,而且操艦轉向會使拖曳陣列彎曲而影響探測,太激烈的操艦甚至可能對陣列施予過大應力而造成毀損),而聲納接觸後進行TMA作業分析目標動態也需要一些時間;此外,反潛艦艇必須伴隨艦隊運動,不能只為了用匯聚區保持接觸一艘潛艦而專程改變航向。 因此,拖曳陣列聲納利用匯聚效應操作時,主要作為一種早期預警;在匯聚區上獲得接觸後,船艦立刻派出反潛直昇機或呼叫友軍反潛機,以最快速率前往聲納接觸的位置,透過聲納浮標或吊放聲納等設備進行確認或建立精確追蹤。 SOFAR聲學通道經常受到海象與海底地形的影響,海床深度變化以及海底山脈都是障礙。一般說來,如果海的深度變淺,對聲學通道會有明顯的影響;如果一部份海底深度沒到聲速低谷深度,部分聲波能量通過此處就會受損;海底愈淺,聲音能量傳遞的損耗就愈嚴重。而如果整個海底深度都沒達到聲速低谷與反轉的深度,SOFAR聲學通道就不存在,而匯聚效應也不會存在。
|