
保羅.迪雷韋爾級多任務巡邏艦──圖片(概念階段)
2013年底出現的義大利新一代多任務巡邏艦(PPA)構型草案,前部裝備一座OTO 127mm艦砲,擁有垂直發射器,
艦橋裝備四面相位陣列雷達以及其他通信、電子戰等天線,機庫下方側面是多功能任務艙的開口,
用來收容 各型載具,例如特戰快艇、登陸艇、無人載具等。
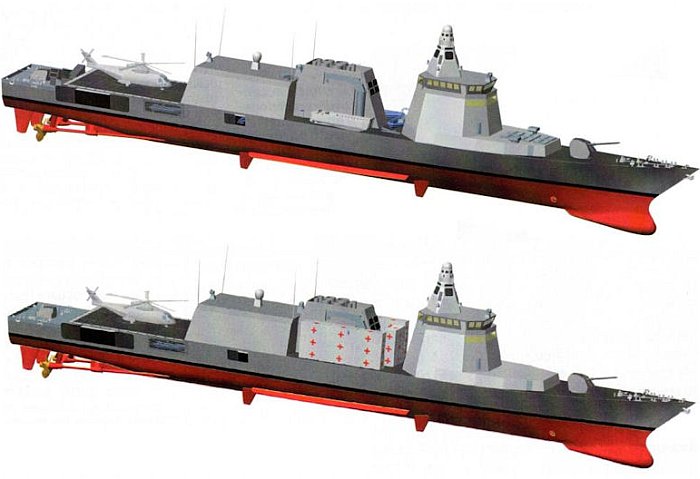
另一種PPA早期構型草案。

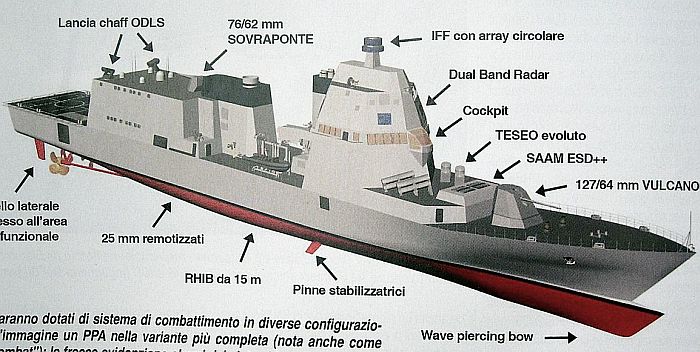
(上與下) 2014年10月歐洲海軍展(Euronaval 2014)中,芬坎提尼造船廠提出的PPA設計方案。相較於先前的方案,
偵測、導航、通信、電子戰等各種天線整合在上層結構裡,相較於整合式桅杆,有助於降低整體高度與
重心。艦體中部與艦尾都設有任務甲板,能依照不同的任務裝置不同任務裝備。

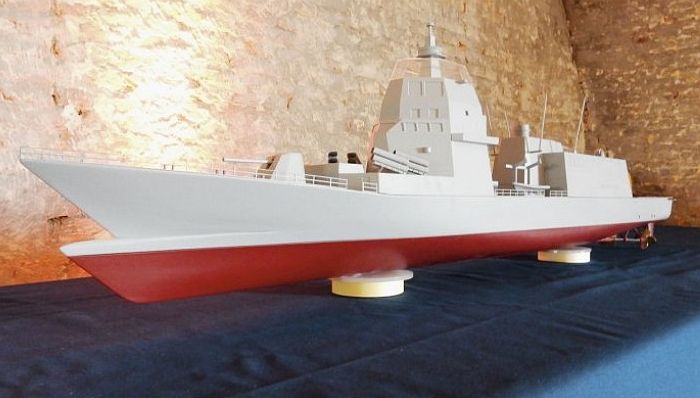
2015年10月下旬在威尼斯舉行的地中海/黑海區域海上力量研討會(Regional Seapower Symposium of the Mediterranean and
Black Sea) 中,義大利首度展出PPA巡邏艦的模型。
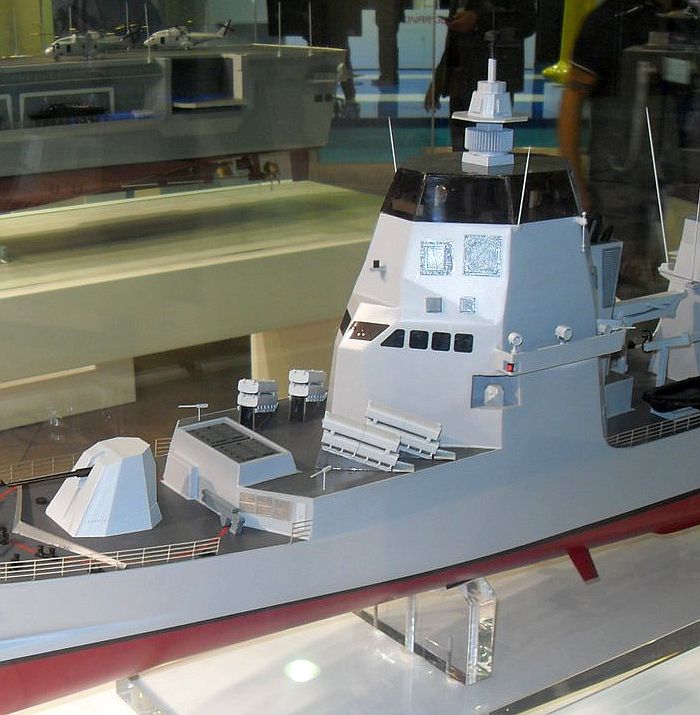
2016年6月的PPA巡邏艦模型,此為滿裝版,配備垂直發射的Aster-30防空飛彈、反艦飛彈、C/X雙波段相位陣列雷達。
艦橋正面突出的結構是視野極佳的駕駛艙,只需兩名人員就可操作。

一張2016年的PPA巡邏艦想像圖
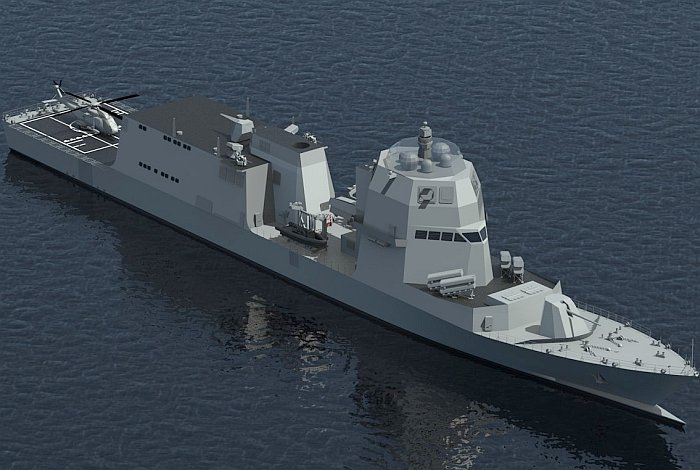
(上與下)義大利海軍在2016年6月於Rivista Italiana Difesa雜誌公布的PPA巡邏艦想像圖,此為滿裝版,
配備兩組八聯裝Sylver垂直發射系統(裝填Aster系列防空飛彈)與反艦飛彈,艦橋頂部
同時整合C波段與X波段相位陣列雷達,是一種雙波段雷達(DBR)。艦首A砲位設置一座
OTO 127mm 64倍徑火砲,煙囪後方設置一座OTO 76mm快砲(含Strales反飛彈套件),
煙囪兩側各裝一座Oto Melara ODLS-20誘餌發射器,

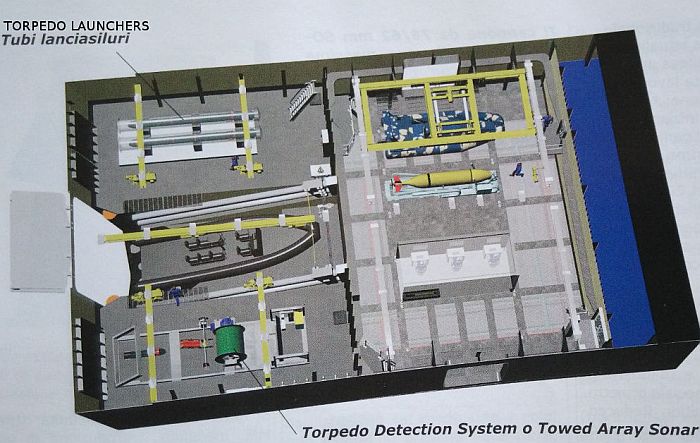
PPA巡邏艦的艦尾佈局,分為兩個艙區。艦尾中線設有一個坡道艙門來收放RHIB小艇,左側有兩個固定式魚雷發射器,
,右側有用來探測來襲魚雷的拖曳陣列聲納。而往前一個艙區裡面可搭載小艇、無人水下載具(UUV)等,透過一個
安裝在艙頂、橫向移動的吊車,從左、右兩舷的艙門收放。

2016年10月歐洲海軍展中,義大利展出的PPA巡邏艦
2016年10月歐洲海軍展的PPA巡邏艦模型前部特寫。艦橋頂部整合四組雙波段相位陣列雷達天線,
艦首配備127mm 64倍徑艦砲、兩組八聯裝Sylver垂直發射器以及四組雙聯裝Teseo Mk.2反艦飛彈發射器

(上與下三張)PPA採用嶄新的艦橋設計 ,採用類似現代飛機駕駛艙的概念;駕駛艙設置在船艛正面中央一個突出的部位,
擁有大面積玻璃,視野極佳;駕駛艙操作介面類似現代民航機的佈局,採用大型平面顯示器,各種操作介面完全數位化。
重要參數能投射在艦橋的窗子上,類似戰鬥機的抬頭顯示器(HUD),並運用擴增實境(AR)的方式在玻璃窗上呈現
各種輔助資訊。航行時,這個艦橋只要三名人員值班。不過最後實際建成的PPA的艦橋配置與此概念圖有所出入。




PPA巡邏艦的SADOC4 CMS作戰系統的43吋超高解析度(UHD)多重觸控屏。旁邊還有搖桿介面。

PPA戰情中心(CIC)裡的任務寬牆顯示屏(MWWS),由多個4K平面顯示器拼接而成,能提供外界完整的360度環場
態勢 顯示(包括環場光電感測器的影像並結合各種感測器的數據)。
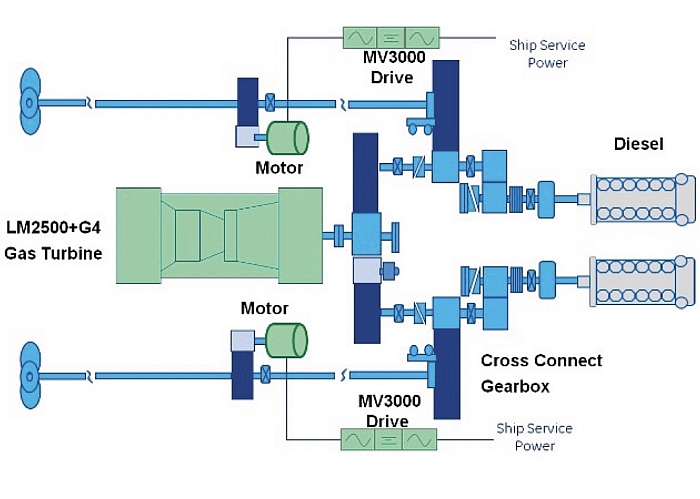
PPA使用複合柴電與燃氣渦輪推進系統(CODAGOL),包括一部 加速用的LM-2500+G4燃氣渦輪、
兩部巡航用的MTU 20V 8000 M91L柴主油機 、兩套減速齒輪箱、兩部低速渡航用的EPM可逆轉推進電動機。
燃氣渦輪主機以及MTU 20V 8000柴油主機的動力輸入減速齒輪箱;而兩部EMP推進電機分別透過離合
器跟左、右推進軸併聯(沒有通過減速齒輪)。此系統可選擇多種主機組合聯合驅動透過減速齒輪驅動雙軸
(選擇包括LM-2500燃氣渦輪與兩部柴油機同時併聯輸出、單靠燃氣渦輪、單靠兩部或一部柴油機)
,或者關閉主機,改由艦上電網驅動EPM推進電機帶動雙軸螺旋槳。