NR-1核子動力研究潛艇
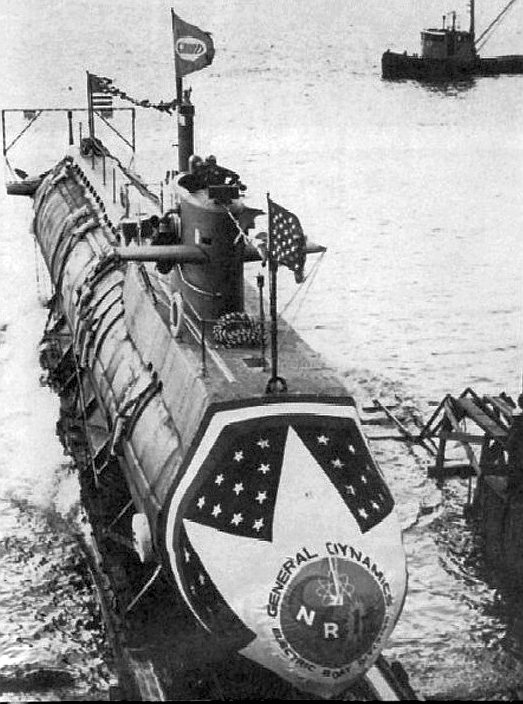
美國海軍在1960年代末期建成的NR-1核子動力研究潛艇,是全世界唯一一艘核子動力的深海研究潛艇。
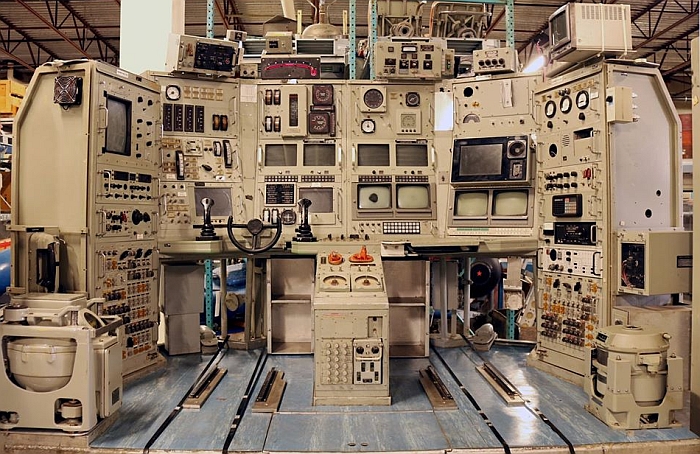
此照片攝於1986年。

NR-1下水當天的照片。

NR-1在海底作業的想像圖,透過下方的機械手臂撈取海床上的物體,或在海床部署設備。

(上與下)NR-1的駕駛席,可以看到航行控制的方向盤,以及各種操作搖桿。


從正面看NR-1

NR-1的帆罩

(上與下)從後方看NR-1

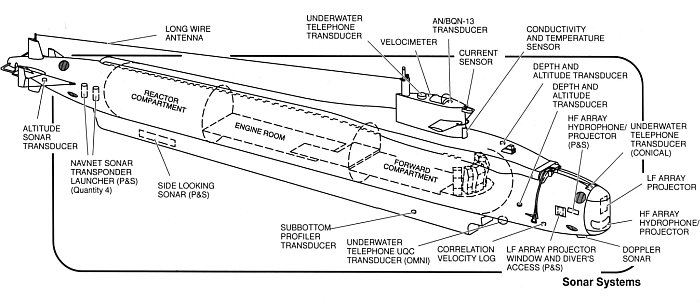
NR-1的內部結構圖。反應器設置在艇體後部。

NR-1除役拆解後,部分遺物(帆罩、艦尾垂直舵、螺旋槳推進器等)在康迺迪克州格拉頓的
潛艦武力圖書館與博物館(Submarine Force Library and Museum)展出。
NR-1拆解後,操控台在2018年5月被送至美國海軍水下力量博物館(U.S. Naval Undersea Museum)作為展品。
──by captain Picard
| 艦名/使用國 | NR-1核子動力研究潛艇/美國 | |||||||
| 承造國/承造廠 | 美國/General Dynamics Electric Boat, Groton, Connecticut | |||||||
| 尺寸(m) |
全長45 耐壓殼長29.3 寬3.8(耐壓殼)/4.8(含艦尾水平舵) 高4.6 龍骨深1.2 |
|||||||
| 排水量(ton) |
浮航365 潛航393 |
|||||||
| 動力系統/軸馬力 |
核子反應器x1 蒸氣渦輪交流發電機x1 外部推進電動機x2 螺旋槳推進器x2 可轉式電力推進器x4 |
|||||||
| 航速(節) |
浮航4.5 潛航3.5 |
|||||||
| 續航力(海里) | ||||||||
| 最大潛深(m) | 914 | |||||||
| 水下探測設備 |
水下聲力電話 高頻(HF)/低頻(LF)聲力發射陣列 低光度照相機(LLL) 低光度可放大照相機 彩色視頻攝影機 電子穩定照相機(ESC ) 障礙物迴避聲納(OAS) 都卜勒聲納 側視聲納(SLS) 雷射線性掃描器(LLS) 超音波的潛底掃描器(SBS)
水下操作臂/回收爪/水力噴射器 關連測速計 海底採樣器 長線性通信天線 AN/BQN-13詢答器 聲納詢答發射器 海底探照燈 |
|||||||
| 人員 | 軍官3名,人員8名,科研人員2名 | |||||||
| 備註 | 共一艘 | |||||||
| 艦名 | 簽約時間 | 安放龍骨 | 下水時間 | 服役時間 | 除役時間 | 除籍時間 | 備註 | |
| NR-1 | 1967/6/10 | 1969/1/25 | 1969/10/27 | 2008/11/21 | ||||
|
起源 在1964年,美國海軍核子推進計畫部門主管──「核子動力之父」海曼.李高佛上將( Admiral Hyman Rickover)提出建造核子動力研究潛艇的構想。傳統的小型深海潛艇都採用電池提供動力,潛航時間有限,在深海作業一段時間就必須上浮回到母船充電與補給,不僅限制了作業範圍,也大幅降低深海搜索作業的效率。而如果研究潛艇採用核子動力,就可以長時間持續在海下作業,省下每次重新上浮充電與再次下潛的時間;這在許多場合(包括大面積海底搜索或者有緊迫時效性的任務)有關鍵性極其重要。 經過設計與概念驗證後,李高佛在1965年3月正式對這個概念賦予「NR」的代號,意味核子動力研究載具(Nuclear Powered Research Vehicle)。在1967年6月,第一艘研究型核子潛艇在康迺迪克州的通用電船(Electric Boat Division of General Dynamics at Groton, Connecticut)開工建造,編號為NR-1(意味第一艘研究型核子潛艇),在1969年10月底服役。李高佛曾試圖鼓吹打造一支研究型核子潛艦部隊,但由於預算限制而,就只建造了NR-1這一艘,是全世界唯一的一艘核子動力深海研究潛艇。
基本設計 NR-1全長只有45m,排水量400噸,採用核子電力系統,由一部小型核子反應器帶動一部蒸氣渦輪交流發電機,產生電力來供應艇上推進以及所有用電設備。NR-1的外觀像是一艘迷你版的美國核能潛艦,採用圓柱狀耐壓殼,帆罩設置一對水平舵,並設置傳統的十字尾舵。艇上的主要推進器是兩個位於艇體外部的推進電機,各直接驅動一個螺旋槳推進器;為了精確控制船位,艇上設置四個可轉式電動推進器(前、後各兩個,採用對角線佈置)。艇上攜帶有總11噸可拋棄的鉛製壓艙物,在緊急狀況下能夠拋棄來減輕重量,使潛艇浮出水面(在極大深度作業時如遇到緊急狀況,有時可能因外部水壓過大而無法以壓縮空氣迅速排除水櫃,此時直接拋棄壓艙物、減輕重量成為最有效的手段)。NR-1的任務包括搜索、從海底打撈物體(包括失事飛機與船隻、軍方在演習中發射部署的武器如水雷或魚雷、因為意外事故而落入水中並有機敏性質的裝備殘骸、古代沈船等)、海洋水文地質研究、在水下安裝與維護設備等,水下作業深度說法有2375英尺(724 m)或3000英尺(914m)。 NR-1潛艦單位(含支援人員)總共編制約35名海軍人員與10名民間合約人員,而艇上編制最多13名人員,包括3名軍官與8名海軍人員,此外還有2名民間科研人員 ;艇上編制13人時,能在海上持續操作16至25天,最高持續潛航作業時間約30天。所有在NR-1潛艇的乘員都需要經過美國海軍的核子訓練,並且由海軍核子推進計畫指揮部(Director, Navy Nuclear Propulsion Program)面試以及監督。 NR-1擁有精密的電子設備與計算機、高精確度主動聲納、導航、通信等設備,具備物體經確定未予識別能力。由於艇上配備數個可轉式電力推進器,在精密導航系統控制下,NR-1能在海床或海底山脈附近精確地將船位保持在特定定點(並抵銷海流等影響),或在一個定點周邊迴旋;此外,能以極高的精確度搜索海底,並繪製一個區域的海底地貌圖像,測量水溫、洋流等一切在軍事、科學研究或商業上有用的海洋水文數據。NR-1能在一定的距離發現並識別海床上的物體,並用機械手臂將物體從海床上取走。 由於NR-1艇內空間狹窄,使得艇上人員作業的舒適性受到嚴重犧牲;例如,艇上約十名人員可能持續在海上操作將近一個月,但艇上沒有廚房與洗滌設施,只能吃冷凍食物,平均每人每週只能以桶裝水洗澡一次;艇上也沒有海水製氧設備,只能以燃燒氯酸鹽(chlorate)蠟燭來提供純氧。體積小巧的NR-1作業時,會明顯感受到海洋潮流或波浪的拖拉。依照1970年代中期NR-1的指揮官Allison J. Holifield回憶,NR-1上的每個人都生病了,船上的生活變成「嘔吐或不嘔吐」。 NR-1的推進器功率較低,在正常操作狀況下雖不成問題;但在面臨較強的橫向海流或淺海地區波浪起伏的情況,NR-1的推進力道可能有所不足;這在無法坐底、只能單靠推進器抵銷海流並保持船位的情境下,比較明顯。例如在1976年在海底打撈F-14A戰機與AIM-54鳳凰空對空飛彈(見下文)的任務中,在海底F-14A殘骸旁作業的NR-1不時遭遇無法預測的海流衝擊(流速約1.5節),艇上的推進器無法有效對抗海流力量,有時使潛艇難以控制。此外,有一次任務中,坐底的NR-1受到海流力量影響,一度被「吸」在海床上而無法駛離。
一張冷戰時代的NR-1照片,當時該艇使用與一般美國海軍潛艦相似的黑色塗裝;服役後期 (應是冷戰結束後),NR-1才將帆罩漆成醒目的亮橘色,在浮航時比較容易容易被其他船隻 看到,確保安全。 支持母船
NR-1雖然採用核子動力,但不能完全獨立作業,需要一艘母船當作支持平台,與一般的深海研究潛艇相同。在港口基地與作業海域之間的往返渡航,是由母船拖帶NR-1,而這段期間NR-1的人員也住在母船上(NR-1的推進功率低,航速只有4節上下,內部起居空間與條件差,不具備自行往返渡航的條件)。在作業期間,母船為NR-1提供一系列後勤支援,包括為NR-1補充壓縮空氣、補給物資或維修設備等;而NR-1需要部署在海床的設備或者從海床回收的物件,自然也儲存在母船上。此外,每次出航可能會同一片海域執行一系列預先規劃好的不同任務,每個任務由不同的科研團隊執行,因此母船一次出航就可以帶上出航期間所有的NR-1輪換人員團隊;這種作業方式大大增加了NR-1潛艇的值勤效率。為了確保NR-1上浮時的安全,母船需要提供此時附近海面的海象、氣象資料以及附近海面船隻動態等信息給NR-1。核子動力的NR-1展開作業後,能長時間以4節左右的速率在水下獨立作業,每次持續潛航作業時間只受到艦上人員補給品的限制(通常是食物),不像一般深海研究潛艇需要頻繁上浮充電。NR-1並不能自行製造補充壓縮空氣(上浮時需以壓縮空氣打入壓載艙將水排出),壓縮空氣存量過低時就需要回到母船補充。NR-1除役前的最後一任母船是MV
Carolyn Chouest。 由於NR-1本身無法在水下自行得知自己的絕對位置,需要由母船透過聲納追蹤NR-1,根據母船本身的絕對位置加上潛艇與母船之間的相對位置,進而求得NR-1潛艇的位置並傳輸給NR-1。因此,這類精確定位的任務中,母船需要具備科研探測船等級的精確定位與保持固定船位的能力。 探測能力 NR-1設有三個觀測窗,搭外部25個照明燈(功率15KW),使艇上人員可對前方與下方進行目視觀測。NR-1的光電探測設備包括:低光度(Low Light Level,LLL)照相機、低光度可放大(zoom)照相機、彩色視頻攝影機、電子穩定照相機( Electronic Still Camera,ESC )等。其中,電子穩定相機(ESC)能實時(real time)提供高品質的影像,而且不像一般的35mm穩定式相機一樣可能耗盡底片,或者面臨跟外部燈光之間的閃光同步( flash synchronization)問題。NR-1的帆罩上有一個固定式桅杆,裝置水面上使用的攝影機。 NR-1配備多種水下傳感設備,提供周遭基本環境資料,或者專門用來紀錄特定定的資訊。艇上有深海海水採樣儀器(depth-gauge system),能採集周遭海水樣本進行分析。NR-1配備多種聲納,障礙物迴避聲納(Obstacle Avoidance Sonar,OAS)用來探測潛艇確保航行安全,以及對海床進行較大範圍搜索,搜尋海底物體位置以及繪製海底地貌聲學圖像;而在從海床打撈回收物體時,通常也以靠OAS聲納來協助水下固定、捲揚等作業。潛航作業靠近海床時,艇上的都卜勒聲納(Doppler sonar)能精確測量艇體與海底地形與物體之間的距離(精確度達1尺),能精確繪製物體(如殘骸)在海底散佈的情況。NR-1還擁有側視聲納(Side-Looking Sonar,SLS),經常在科學探測、繪製海底沈船或殘骸聲學影像時用到。OAS是NR-1最常使用的聲納,而NR-1除役前使用的OAS聲納是1993年安裝的設備。然而,這套聲納有時被認為精確度與能力稍嫌不足,當潛艇快速靠近海底地障時,OAS卻沒能即時有效探測到。此外,OAS設置在艇首,只能探測前方,在許多場合中(例如需要在狹窄的地方倒退)無法提供其他方位的必要資訊。
NR-1配備雷射線性掃描器( Laser Line
Scanner,LLS),工作距離在視線範圍以上。在檢查海底燃油、天然氣輸送管道表面狀況時,NR-1的LLS能同時掃描兩邊平行的輸送管道,提高作業效率。NR-1還有使用超音波的潛底掃描器(Sub-Bottom
Scanner,SBS),工作原理類似醫學的超音波檢查設備,能探測隱藏在海底地表以下的 通信方面,NR-1配備水下聲力電話(underwater telephone,UWT)與高頻(HF)無線電通信系統,其中高頻無線電可進行長距離通信,在緊急情況使用(一般而言NR-1需要高度保密)。水下聲力電話是NR-1與水面支援船隻直接溝通的主要手段,然而在深入海底峽谷等地形時,聲力電話效果極差。NR-1從帆罩後部到艇尾拉著一條HF無線電通信天線,然而在冰層下方的任務中,這條通信天線在突破冰層上浮時應該會毀損。 水下操作、回收能力 NR-1設有遙控的水下機械手臂設備來在海床上收取物體或部署裝備(例如設置在海床上的探測儀器);操作席設在觀測窗前,操作員根據目視來操作控制。NR-1的水下操作臂(manipulator)能直接抓取直徑8吋(203mm)以內的物體,然後放置在艇體旁邊的置物籃裡;而在處理較大型的物體時,則能以回收爪(recovery claw)來收取。此外,NR-1的水下操作工具還包括一個水力噴射器(jetter),能清除海床上物體表面的沙子,或者噴射周圍海床上的砂石將需要隱藏的物體(如電纜)掩埋。NR-1還可用機械臂在海床上部署或剪斷纜線。 如果要打撈的物體較大較重(如戰鬥機殘骸、零件等),超過NR-1的處理能力,則依照回收程序(recovery operations)處理;此時,NR-1與上方的支援船隻共同合作,由NR-1負責在水下物件上設置繩索,然後將母船上捲揚設備垂下來的纜繩與物件上的繩索結合,由母船負責拖走或吊起海底物體。 實際經驗顯示,NR-1的水下操作臂的能力無法完全滿足某些需求;例如在打撈F-15E殘骸的任務中,水下操作臂有時抓取能力不足,造成不便。而NR-1水下操作臂最大的缺憾是沒有回饋(feedback)功能,無法在抓取時根據物體型態自動調整抓取力道,在水下撈取脆弱物體時很可能會將物體夾壞;在1986年打撈挑戰者號太空梭殘埋的任務中,一些較脆弱的殘骸就被認為不適合由NR-1的水下操作臂直接抓取,認為會因而損壞,這是少數NR-1抵達現場卻無法執行工作的紀錄。 NR-1具有在水下施放、回收潛水人員的能力,這在幾次任務中派上用場。例如在1995年回收F-15E戰機殘骸的任務中,NR-1的的機械操作臂曾發生故障,這在艇內無法處理,但最後都被潛水人員從外部迅速修好。而打撈工作中,艇上的操作臂無法進行一些比較精細複雜的工作,例如在物體上設置繩、在要打撈的大型物體上安裝浮力袋等等,就需要派出潛水人員處理;以打撈F-15E的工作為例,能直接以NR-1的回收爪取回彈射椅等物體,但其他許多工作都需要派遣潛水人員到艇外才能完成。而在打撈大型物件時,也需要派出潛水人員將浮力袋固定在物體上(艇上的操作臂無法進行這樣精細的工作)。 導航定位
在一些科研或軍事任務場合,例如探測海底殘骸,尤其是要去觀察、評估、回收水雷或其他爆裂物的時候,水下導航定位精確度對NR-1至關重要。由於NR-1無法在水下直接得知自己的精確位置,而且海圖資訊也無法事先標示水雷、爆裂物的精確位置(例如演習時施放的水雷),因此不可能在下潛之後直接航向水雷位置開始作業,而必需在已知水雷所在位置附近,搜索該處海床並辨認出水雷。回收演習的水雷時,先從佈雷設備查出要回收的水雷序號;等演習結束、水面探測船以聲納標定水雷在海底部署的位置後,再由NR-1抵達該區域,目視確認水雷序號並完成回收。 NR-1上最精確的定位裝置是都卜勒聲納,探測精確度接近1英尺,能精確掃描附近海底地貌並與海圖比對,進而得知自身位置;然而,都卜勒聲納只能在靠近海床時使用,遠離海底時NR-1仍須透過母船獲得精確位置。
坐底能力 當潛艇上有外部設備故障、需派遣潛水人員到艙外處理的情況下,潛艇坐底是最安全的方式,避免船體隨海流漂移而對潛水人員造成危險。例如在一次任務中,NR-1的障礙迴避聲納(OAS)故障,而接下來的作業不能缺少OAS;當時NR-1並沒有上浮處理,而是直接坐底並派出潛水人員到船外,修復後就繼續執行任務。而當NR-1纏上漂流的繩索或漁網時,最安全快速的處理方式就是坐底,並以前部的操作臂將鬆開或切斷繩索。 坐底也提供了除了下錨之外、另一種暫時靜止的方式,尤其是在岩石或珊瑚的海床上。此外,NR-1在水下任務需要暫停,或者任務之間的空檔,坐底是比較安全、舒服的方式;例如,如果某一段水下工作提前完成,NR-1會先坐底,艇上人員可利用空檔擬定下一階段工作的計畫與細節,然後進行下一段工作。
NR-1底部設置有輪子(又稱為「自行車輪」),在某些坐底的場合頗有用處。首先,在坐底時,底部的輪子允許NR-1在海床上有限度地調整位置,控制位置的精確度比懸浮在水中靠推進器移動更好,特別是在周遭海流較為強勁、容易影響潛艇船位的情況下。此外,NR-1的輪子也在潛艇坐底時提供一定程度的緩衝,例如1995年在淺水域打撈F-15E殘骸的任務中,坐底的NR-1潛艇受到周遭整片海水上下波動的影響產生「彈跳」,此時底部輪子就能一定程度地吸收衝擊力量。有時NR-1也可以利用「自行車輪」攪動海底地表,例如在搜尋甲烷沼氣時,用輪子翻攪海床表面能觀察到是否有沼氣洩出。不過在某些任務,例如在處理海底電纜、天然氣或石油輸送管線時,就不能以輪子接觸海床移動,避免壓壞管線。 服役經歷 NR-1的任務與身份十分機敏,從沒有獲得官方正式命名或承認服役,有時被海軍私下暱稱為Nerwin(精靈的名稱)。海曼.李高佛上將拒絕對這艘研究潛艇使用任何命名,並且盡量避免讓這艘由多個不同單位贊助的潛艇受到任何外界(如國會)關注與監督。 NR-1在冷戰期間(1970至1980年代)進行過許多機密任務,除了是國防部的任務之外,許多還可能與中央情報局(CIA)有關;其中,少部分機密任務在2000年代以後陸續解密(見下文)。冷戰時代,美國海軍潛艦部隊高層嚴格地保守NR-1的秘密,即便美國海軍內部大部分單位都不知道NR-1的存在;對NR-1的保密,很大一部分是海曼.李高佛的個人影響,甚至對於內部,李高佛只提供NR-1服役運作的最低限度資訊。 在1976年,NR-1參與打撈F-14A戰機與AIM-54鳳凰空對空飛彈的任務(見下文)。在1979年,NR-1參與回收三叉戟(Trident)潛射彈道飛彈試射的殘骸回收工作。在1984年,NR-1曾協助在海底搜尋並標定一艘核能彈道飛彈潛艦的螺旋槳。1986年1月28日挑戰者號太空梭(Challenger)發射升空時爆炸之後,NR-1被派往附近海域搜索落入海中的殘骸,標定並回收關鍵組件來研判失事原因。由於核子動力的NR-1不需要頻繁上浮充電,長時間潛航也不受海面風浪影響,因此是當時搜尋、打撈挑戰者號殘骸的最主要工具。在1989年,NR-1參與海軍太空與作戰系統司令部(Naval Space and Warfare Systems Command,SPAWAR)的海底電纜掩埋工作(使用水壓噴槍)。在1990年,NR-1在查爾斯頓基地作業區域的艦體完整性測試場(Charleston Operating Areas Hull Integrity Test Sites,HITS)進行研究調查,研究當地水文,以及美國核能潛艦海上測試中留下的殘骸。在1993年,除役的鮭魚號柴電潛艦(ex-USS Salmon SSR-573)作為魚雷靶艦擊沈,NR-1參與後續的殘骸研究調查工作,同年也曾在水下研究失效破損的石油管線。在1994年,NR-1在東大西洋參與回收戰略音響監視拖曳聲納(SURTASS)的工作。 在1995年中,羅伯特.布蘭德博士(Dr. Robert Ballard,曾發現鐵達尼號以及俾斯麥號戰鬥艦等著名沈船)搭乘NR-1潛艇前往希臘外海,搜索在一次大戰期間於1916年11月21日在希臘近海中雷沈沒的布列顛尼亞號(HMHS Britannic)醫療船(鐵達尼號郵輪的姊妹船)的殘骸,進行了調查與聲納測繪。同樣在1995年,NR-1與海軍遠洋救援船格瑞普斯號(USS Grasp ARS-51)一同打撈回收一架F-15E戰鬥機的殘骸,NR-1在這年還參與過回收一枚324mm輕型魚雷的工作。1997年夏季,NR-1曾在參與搜索以色列在1968年沈沒的潛艇Dakar號(該艇在1999年5月29日在2900公尺深的海底被發現),以及尋找羅馬古船殘骸。在1998年,NR-1參與美國海軍水下作戰中心(Naval Undersea Warfare Center)研發中的低頻寬頻變深聲納(Low-Frequency Broadband Variable Sonar)的測試工作。NR-1也曾參與搜索1999年10月31日於大西洋墜海的埃及航空(EgyptAir)990號班機的殘骸與黑盒子。在2007年2月25日,NR-1在母船MV Carolyn Chouest的拖帶下抵達德克薩斯州格拉維斯頓(Galveston),參與墨西哥灣的美國花園堤岸國家海洋保護區(Flower Garden Banks National Marine Sanctuary)的海底研究活動。 NR-1服役期間已知的受勳紀錄包括:海軍單位獎章(Navy Unit Commendation )、三星傑出貢獻單位獎章(Meritorious Unit Commendation with three stars )、海軍戰鬥效率E勳表(navy E Ribbon with Battle "E" device)、二星國家防衛服務(National Defense Service Medal with two stars )、全球反恐戰爭服務獎章(Global War on Terrorism Service Medal )、海上服務部署勳表(Sea Service Deployment Ribbon)。 1976年:打撈F-14A戰機與鳳凰飛彈 NR-1解密的任務中,最有名的一次是回收意外落海的F-14A戰機與鳳凰飛彈。美國海軍甘迺迪號航空母艦(USS John F. Kenned CV-67)在1976年9月14日在蘇格蘭斯卡帕灣(Scapa Flow, Scotland)以北100海里水域作業時,一架F-14A戰機在彈射升空前,發動機突然意外加到全速,飛行員雖然使用煞車,但該機仍衝出甲板並沈入海底(兩名飛行員即時彈射逃生);由於是低速落水,這架F-14A帶著機上掛載的一枚AIM-54鳳凰(Phoenix)長程空對空飛彈完整地沈入深度1850英尺(約563.88m)的海底。這個情況被跟蹤甘迺迪號戰鬥群的蘇聯巡洋艦發現,蘇聯自然不放棄獲得美國最新型戰鬥機的機會,於是美蘇雙方火速展開打撈競賽。美國海軍船艦與P-3C巡邏機在周遭海域進行24小時不間斷的海空監視,監視任何靠近的蘇聯船艦,北約盟國也派出多艘船隻在附近海域搜索這架F-14A;由於當時已經靠近冬季,必須在海象風浪惡化到無法作業之前完成打撈。在10月3日,攜帶側掃聲納的美國海軍遠洋拖船夏卡利號(USS Shakori ATF-162)在預期的位置首度發現了這架F-14A,隨後該艦返港進行必要整補並於一週後回到現場,但聲納掃描一無所獲,夏卡利號只能在附近水域冒著更惡劣的海象重新搜索。 在一籌莫展之際,一位美國 Sperry公司的工程師羅傑.薛爾曼(Roger Sherman)到位於蘇格蘭Holy Loch的第二潛艦戰隊(Submarine Squadron Two)總部,建議動用NR-1潛艇;不過基地裡的美國海軍軍官都不知道NR-1的存在,也不知道此時NR-1就在離墜機處不遠的水域。得知NR-1的能力之後,美國海軍水面艦隊單立刻向華盛頓的潛艦司令部(COMSUBLANT)傳達希望動用NR-1的信息,但很快就遭到拒絕;這不僅因為美國海軍內部對NR-1及其保密、大部分單位都不知道其存在,而且美國海軍潛艦單位不願意讓水面艦單位接觸到極機敏的NR-1。然而,得到拒絕的回信後,羅傑.薛爾曼立刻聯繫在五角大廈的友人,與海軍重量級人物海曼.李高佛上將取得聯繫;這招迅速奏效,幾個小時後,羅傑.薛爾曼就得到潛艦司令部的回覆,准許動用NR-1進行搜索。 美國海軍與皇家海軍部署兵力在周圍海域阻擋蘇聯船隻進入;美國海軍鱘魚級核能攻擊潛艦蝙蝠魚號(USS Batfish SSN-681)在此處緊密監視,奉命「清除」(sanitize)任何出現在此的非盟邦船艦,魚雷裝填入魚雷管備射;而皇家海軍的艦隊油船藍色流浪者號(HMS Blue Rover A270)也在附近水面巡邏,武器上膛,驅逐任何非盟邦船隻。蘇聯海軍也派遣一支打撈船隊在附近作業,由海軍水面船艦支援,並做好了與英美海軍衝突的準備。經過幾天搜索後,美國海軍拖船夏卡利號再次以聲納發現可疑水下物體,隨後就派遣NR-1開始作業;搜索附近一帶海床之後,NR-1發現了這架F-14A,該機被大量繩子纏著,顯然已經被拖行一段距離(所以它離開了夏卡利號最初聲納接觸的位置),繩子上纏著包含法文、英文與斯拉夫文字的浮標;由於當地漁船捕撈的魚種不會出現在這麼深的深度,不太可能是遠洋漁船無意間拖行,因此可以推測蘇聯的拖船很可能也發現了這架F-14A,並在夏卡利號返航整補又回到現場的這段期間試圖拖帶這架F-14A。而更重要的是,NR-1發現,機上攜帶的那枚AIM-54鳳凰飛彈並不在現場。
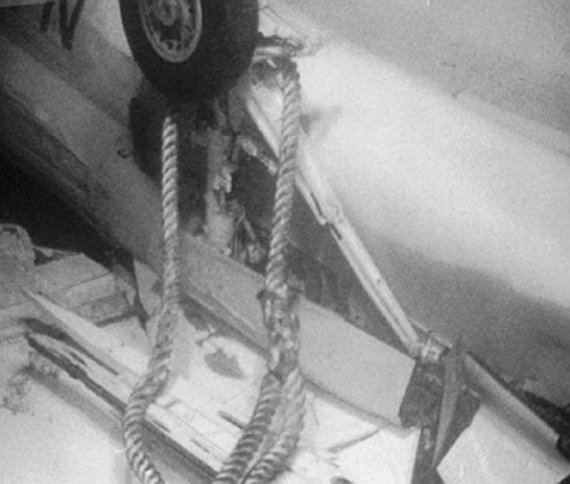
NR-1近距離拍攝、沈在海底的F-14A做艙部位(兩名駕駛員都成功彈射逃生)。
NR-1在海底為這架F-14A安裝繩索以進行吊掛;這項作業存在很高的危險性。
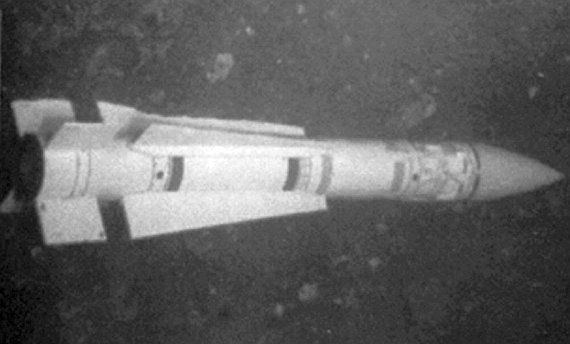
NR-1拍攝在海床上的AIM-54鳳凰空對空飛彈;冒著引信可能被觸發的危險, NR-1以機械手臂回收了這枚飛彈。 發現F-14A殘骸後,NR-1努力地利用遙控機械臂,在這架F-14A設置吊掛用的繩索;這項作業極具挑戰性,因為此時大量網繩纏在這架F-14A上,網繩隨著海流飄盪;NR-1作業時,需要盡量讓艇尾推進器遠離殘骸與網繩,避免螺旋槳撞擊飛機殘骸或纏入網繩。更糟的是,當地開始出現難以預測的突發性海流(稱為 Nolter's Maelstrom),流速可能達1.5節,不時會衝擊NR-1的艇身,屢屢讓NR-1險些失控。在NR-1在海底工作的同時,蘇聯的打撈船隊也在頭頂的海域作業;雖然皇家海軍藍色流浪者號盡力阻擋蘇聯船隊作業,但他們還是依照自己的方式進行搜索,並且慢慢靠近了F-14A(但蘇聯不知道正在下方作業的NR-1潛艇)。經過約兩天的努力,NR-1終於把繩索安置在F-14A上,然後將美國拖船垂降下來的繩索與飛機連接,開始進行吊掛;而蘇聯船隊已經在美國拖船附近虎視眈眈,期望美方打撈失敗然後伺機而動。在蘇聯船隊面前,美國拖船冒著20英尺(超過6m)的浪高開始捲揚起重機;由於風浪實在過大,對纜繩施加強大的力量,美國海軍拖船幾次捲揚,都以纜繩斷裂告終,使這架F-14A一次次重新沈入海底。幾次失敗後,美國海軍決定先將這架F-14A拖往淺水域再撈起。在此同時,NR-1繼續在海床搜索,找到了那枚遺失的AIM-54鳳凰飛彈;由於此時無法確定這枚AIM-54飛彈的戰鬥部引信是否備炸,回收作業存在很高的風險。NR-1小心翼翼地以機械手臂夾住AIM-54,然後趁著午夜緩慢地浮出水面(如此,附近的蘇聯船隊無法看到NR-1的清晰影像),美國拖船以纜繩綁住這枚飛彈,然後NR-1鬆開機械臂,將飛彈轉移給這艘拖船。 此時,西德海軍兩艘大型拖船(包含Taurus)抵達現場,兩船用重型纜繩綁住F-14A,其中一艘維持在原地,另一艘則拖著纜繩繞圓圈,將這架F-14A絞碎。然後,兩艘拖船將這架F-14A拉升到靠近海面,將之拖到淺水區域,然後以典型的淺水域打撈方式,將F-14A殘骸撈起。這次不凡的打撈作業總共耗費約240萬美元,F-14A的關鍵機敏──包括機首的AN/AWG-9射控雷達以及AIM-54鳳凰飛彈,都沒有落入蘇聯手中。蘇聯不僅失去一次獲得美國海軍最先進戰鬥機技術的機會,而且在夜色中親眼目睹這艘前所未聞、幫助美國搶先完成打撈的小型潛艇。此後,美國海軍公布打撈F-14A與AIM-54飛彈的過程,並且首度對外公開NR-1的存在;然而,美國海軍當時對NR-1的描述是「搭載5名人員的研究用潛水載具」,顯然隱藏了NR-1的真實性能以及用途。 除役 NR-1在2008年11月21日康迺迪克州的格拉頓(Groton)潛艦基地停用,隨後在緬因州的朴次茅茲海軍造船廠(Portsmouth Naval Shipyard, Kittery, Maine)卸除核子燃料並拆解。在2013年11月13日,美國海軍宣布,完成核反應器拆解的NR-1部件(帆罩、垂直尾舵、螺旋槳推進器等)送到格拉頓的潛艦武力圖書館與博物館(Submarine Force Library and Museum)永久展示;而NR-1的操控台則在2018年5月送到美國海軍水下力量博物館(U.S. Naval Undersea Museum)作為展品。
NR-1的操控台在2018年5月被送至美國海軍水下力量博物館(U.S. Naval Undersea Museum)作為展品。
|