
無人力需求船艦(NOMARS)
美國國防部先進計畫局(DARPA)的無人力需求船艦(NOMARS)首艘原型艦勇抗號(Defiant USX-1)
在2025年2月於尼可拉司兄弟船艇公司的設施建成。勇抗號主承包商是瑟卡(Serco)無人系統

(上與下)NOMARS首艘原型艦勇抗號(Defiant USX-1)建造期間的畫面。這是第一種完全不不考慮人員
在船上起居作業的平台,省略了以往用來支持人員作業的空間與設施,以增加經濟性。


下水前夕的勇抗號。與一般有人船型相較,勇抗號由於省略人員起居所需的各種空間與設施,
所以船體十分細長,乾舷低矮。

(上與下)2024年9月,瑟卡無人系統開發的自主海上加油系統在美國海軍無人測試船遊騎兵號
(USV Ranger OUSV-1)與水手號(USV Mariner OUSV-4)進行驗證,使無人船在不需人力介入的
情況下在航行間受油;這項技術是未來無人海上載具能廣泛部署的重要條件。

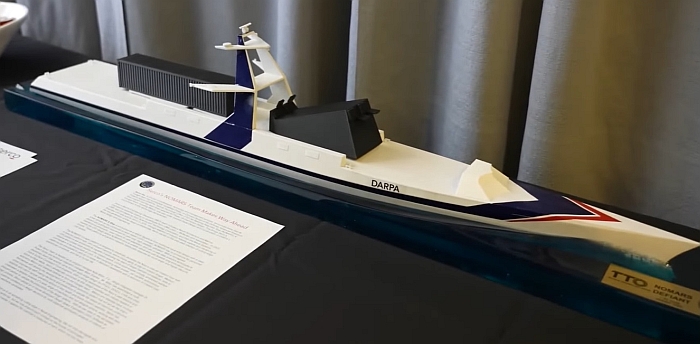
(上與下)2025年1月美國海軍水面艦協會年會(SNA 2025)上,瑟卡無人系統與DARPA
展出的一種MUSV概念,長度約55公尺、排水量約300噸(規模與勇抗號實驗船類似),
裝載一座BAE 的四聯裝可適應性發射器(ADL)以及一個40英尺集裝箱任務模組。


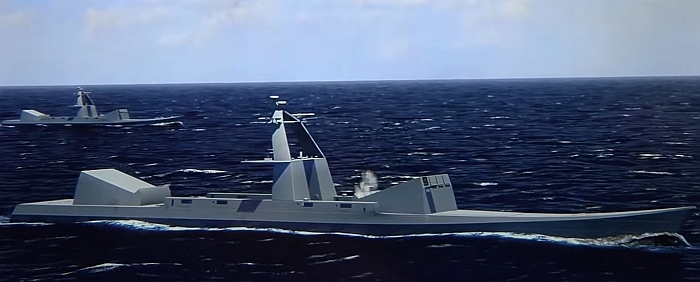
(上與下)2025年1月美國海軍水面艦協會年會(SNA 2025)上,瑟卡無人系統與DARPA
展出的一種放大版全無人水面船艦的概念,甲板上裝備四座四聯裝ADL飛彈發射器,總共16管。
2025年1月美國海軍水面艦協會年會(SNA 2025)上,瑟卡無人系統與DARPA在影片中
呈現的作戰型全無人載具的概念。

2025年8月DARPA公布的勇抗號影像。艇首有一個多角的盾狀結構,用來擋浪以及保護艙蓋。

2025年8月出現的勇抗號照片。艇尾設置一個黑色棚子,作為測試階段監控人員的工作地點。

航行中的勇抗號。
──By Captain Picard
|
起源
在2020年,美國國防部先進計畫局(Defense Advanced Research Projects
Agency,DARPA)啟動無人力需求船艦(No Manning Required
Ship,NOMARS)項目。先前國防部戰略能力辦公室SCO)大君主幽靈艦隊(Project Ghost Fleet
Overlord)等USV項目基本上都是在現有的有人船隻來發展,需要配置少量人力常駐;而NOMARS設計上則不需要也不期待任何人力介入,所以完全沒有人員起居與活動空間、支持設施和安全救生裝備等,大幅簡化了平台設計,並且把所有空間都用於任務籌載。 2024年1月底國防部創新技術單位(Defense Innovation Unit,DIU)向美國海軍研究所新聞(USNI News)透露,打算在中國入侵台灣時在臺灣海峽部署成千上百艘殺傷性無人載具來阻撓、挫敗中國的海上入侵,此概念稱為「地獄景觀」(Hellscape)。在這種需求下,可靠又符合經濟效益的全無人技術是必要的基礎,DIU認為對於一般商業公司而言,在18個月內製造上百艘殺傷幸無人載具是可能的。在這種需求下,就需要另闢新的無人水面載具思路,跳脫先前由載人船艦平台改成無人船的思維,滿足經濟可負擔、適合快速生產、可靠度高的思維。 在2025年1月,美國海軍宣布,發展水面無人載具將聚焦於更小、更簡單、可交換性更高的無人機(drone)型態水面載具,而非較為傳統、複雜昂貴的MUSV與LUSV。 在2025年8月14日一個美國海軍研究所(U.S. Naval Institut)活動中,三名美國海軍與會主管都表示,美國海軍接下來發展無人系統會減少選擇性人力操作(optionally manned)載具的比重,更專注於發展完全無人的系統。美國海軍無人海事系統主管馬特.路易斯上校( Capt. Matt Lewis)表示,一旦載具需要容納操人員,就會產生一堆需求,成本與複雜度也顯著上升;而駐防在聖地牙哥的第一水面開發群(Surface Development Group One)指揮官加瑞特.米勒上校(Capt. Garrett Miller)更直接表示,「非常簡單,我們當然希望發展全無人系統」。先前美國國防部或海軍幾個較大型無人船的項目如LUSV與MUSV都以有人的民間沿岸工作船為基礎,例如近岸石油/天燃氣工作船;這些載具都是選擇性有人操作,平時編制少量人力,必要時以完全無人自主的方式操操作並與有人船艦一同作業。但是這些先前的研究已經被暫停,整個項目被重新定義並擴大了範疇。而在小型載具方面,美國海軍提出了與先前國防部「複製者倡議」(Replicator initiative)並行的類似概念,打算建立由大量載具群集(swarm)的空中與海上載具。
全自主載具的技術挑戰 NOMARS項目的重點在於實現無須人力介入的完全自主操作,同時也要顯著降低操作成本以及增加籌載能力,使其生產與部署符合經濟效益。少掉人員之後,載具的日常維護與安全性成為挑戰;例如萬一發生火災,就必須依靠自動化的氣體式滅火系統來撲滅火勢。由於氣體式滅火系統會讓人窒息,在有人船艦上往往並不適合,但很適合用於完全無人的平台。NORMAS的船艦平台設計著重於提高流體效率、運作時的低跡訊,以及長期在海上環境與敵方威脅下運作的可靠性等。依照2020年NOMARS項目啟動時的想定,打算發展一種中型全無人船隻,每年有超過90%時間能在海上部署。
NOMARS首艘原型艦:勇抗號
勇抗號(Defiant USX-1)實驗船於2025年3月初下水
|
\
