
中型水下自航載具/小型水下自航載具(MUUV/SUUV)
美國海軍遠征水雷反制作戰(ExMCM)單位使用的Mk18 Mod2王魚中型無人水下載具。
美國海軍在2020年代初期啟動中型UUV(MUUV)項目,發展一種共通MUUV取代
美國海軍水雷與爆裂物處理單位使用的Mk18 Mod2王魚載具,以及潛艦部隊的
剃刀鯨(Razorback)水下無人載具。
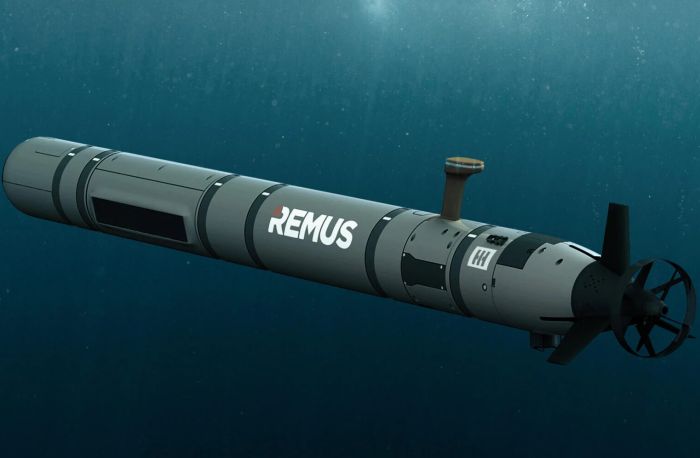
HII集團在2022年11月7日公布的REMUS 620載具想像圖,是REMUS 600後繼型號

REMUS 620載具進行測試的畫面

2023年12月9日,美國海軍公布狄瓦爾號(USS Delaware SSN-791)核能攻擊潛艦第一次完成「黃鱔魚」
項目水下無人載具從潛艦魚雷管發射與回收的端對端測試的照片。黃鱔魚是結合MUUV、配合潛艦魚雷管
發射與回收的項目,整個單元稱為自主水下載具/抗震防火密閉膠囊(AUV/SAFECAP)。此次測試結合
REMUS600水下載具。

準備裝填到狄瓦爾號(USS Delaware SSN-791)核能攻擊潛艦的「黃鱔魚」水下無人載具從潛艦
,REMUS 600載具被封裝在一個相容於533mm魚雷管的容器裡。

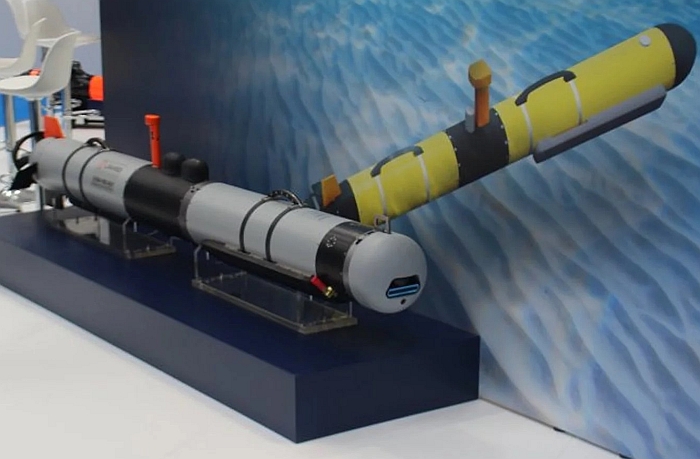
2025年7月,REMUS 620結合「黃鱔魚」在維吉尼亞級潛艦彈艙整合設施(VCCPIF)進行自主水下載具/抗震
防火密閉膠囊(AUV/SAFECAP)的端對端測試。此時REMUS 620載具裝置在VCCPIF模擬的魚雷艙發射架上,
並準備填入前方的金屬密閉膠囊容器中。
──By Captain Picard
|
中型無人水下載具(MUUV) 剃刀鯨潛艦用UUV 在2010年代初期,美國海軍部署了由潛艦收放的剃刀鯨(Razorback)中型水下無人載具(UUV)進行實驗,主要目的是在沿岸淺水域增強潛艦的戰場態勢感知能力,並且探測水雷爆裂物等威脅。 剃刀鯨載具是基於Hydroid(2020年成為HII的水下系統,註)的距外環境監視單元(Remote Environmental Monitoring UnitS,REMUS)系列的REMUS 600發展而來。美國海軍總共發展兩種剃刀鯨型號,最早的是MK19,從潛艦加掛的乾式掩體艙(Dry Dock Shelter,DDS,用來收同特戰部隊所需的輸泳載具等裝備)來收放,或者從俄亥俄級巡航飛彈潛艦(SSGN)的大直徑發射管收放,稱為剃刀鯨DDS版(Razorback Dry Deck Shelter)。剃刀鯨MK19從2017財年開始採辦,2021財年開始在艦隊中部署。隨後,美國海軍又以剃刀鯨為基礎發展具備潛艦魚雷管發射與回收(Torpedo Tube Launch and Recovery ,TTL&R)能力的型號,稱為MK20,在2019年開始發展需求文件以及整合到潛艦的相關工作,並在2022年展開業界競標。MK20的發展並不順利,進度落後且無法滿足需求。 美國海軍總共擁有9具剃刀鯨UUV,配屬於潛艦部隊下轄的第一水下載具中隊(Unmanned Underwater Vehicle Squadron-1,UUVRON-1);從2021年起,美國海軍開始實際測試潛艦與剃刀鯨UUV載具的聯合操作,UUVRON-1在2022年7月升格為一個主要司令部由太平洋艦隊潛艦武力(Submarine Force, U.S. Pacific Fleet)指揮官(少將階)直接管轄。 在2016年10月26日,美國海軍作戰部長的水下作戰辦公室(OPNAV N97)主管William Merz少將在美國海軍潛艦聯盟(Naval Submarine League)年度論壇透露,美國海軍潛艦社群正努力加速發展無人水下載具(UUV)的領域;William Merz少將指出,在2012年,美國海軍第五艦隊部署了Mk18 Mod 2王魚無人水下載具投入實戰任務。而美國海軍太平洋區潛艦(U.S. Submarine Force Pacific)指揮官Fritz Roegge少將也表示,目標是在2019年在第五潛艦開發群( Submarine Development Squadron 5)之下成立第一個UUV中隊,進行各項潛艦配合UUV的實驗。美國海軍潛艦項目執行辦公室(Program Executive Officer for Submarines)主管Michael Jabaley少將表示,在美國海軍開始規劃下一代核能攻擊潛艦(SSN(X),當時預估在2034年訂購第一艘)之前,必須先釐清潛艦部隊對於UUV或其他領域無人載具的相關需求,例如由潛艦部署的無人飛行載具(UAV)、能為值勤中的UUV充電的前進部署充電前哨站(Forward-Deployed Energy-Charging Outpost,FDECO)、潛艦用UUV由21吋魚雷管或3吋發射器(拋擲誘餌或艦上垃圾筒)發射與回收...等。 新一代SUUV/MUUV 在2020年5月21日,美國海軍發佈中型水下無人載具(Medium Unmanned Underwater Vehicle,MUUV)的需求徵詢書(RFP),打算發展一種新的中型UUV,一併取代遠征水雷反制作戰營(Expeditionary Mine Countermeasures,ExMCM)所使用的MK18 Mod2王魚UUV,以及潛艦部隊使用的剃刀鯨中型UUV(兩者都是基於REMUS 600。其中,潛艦型必須能從潛艦533mm魚雷管施放與回收。MUUV由海上系統司令部(NAVSEA)無人與小型水面作戰船艦項目辦公室(Program Executive Office for Unmanned and Small Combatants,PEO USC)旗下的無人海洋系統辦公室(Unmanned Maritime Systems Program Office,PMS 406)以及遠征任務項目辦公室(Expeditionary Missions Program Office,PMS 408)一同執行;此外,潛艦項目辦公室(PEO Submarine)也會參與工作,協助發展從潛艦魚雷管部署的版本。潛艦版本MUUV要求TTL&R能力、能從魚雷管回收是一大技術難點,從魚雷管部署施放較為容易,但要自主回收很難;此外,將鋰電池驅動的MUUV整合到潛艦系統中,也有許多挑戰性。UUV如具備TTL&R能力,潛艦就不需要像一樣需要浮到水面上派出人員來回收載具,大幅提高潛艦作業的隱匿性與作業彈性,對於執行情報蒐集、海床探測、隱蔽水下通信等機敏任務特別有價值。
MUUV使用開放式架構與模組化設計,以單一通用基線載具(包含內建基本感測器等部件)為基礎,搭配不同單位各自的施放/回收系統;潛艦用的魚雷管發射/回收(Torpedo
Tube Launch &
Recovery,TTL&R)構型的主要任務是擴展潛艦的海洋水文環境感知以及情報蒐集能力(例如浮出水面蒐集通信等電子信號);而在水下爆裂物/水雷無人載具(MEMUUV)構型下,則是從水面上(如從RHIB艇)部署收放,主要用於水雷探測與反制任務。依照計畫,MUUV首先發展水面的水雷反制版本,取代遠征水雷反制作戰(Expeditionary
Mine Countermeasures Companies,ExMCM)所使用的Mk18
Mod2王魚載具,隨後再發展潛艦操作的版本(潛艦版MUUV主要挑戰,是配合533mm魚雷管的施放/回收系統)。 依照Malatesta上校在SNA 2021公布的簡報,現有的8個海軍遠征水雷反制作戰(ExMCM)營都已經配備Mk18 Mod2王魚UUV;而在2020財年預算中,美國海軍決定將ExMCM單位擴充一倍,即另外增加八個ExMCM營。前四個新ExMCM營成軍初期先配備現役Mk18 Mod2,後四個則預計在2024到2025年間接收新的蝰魚MUUV。 在2022年8月22日,美國海軍海上系統司令部(NAVSEA)與Leidos簽署MUUV的發展合約,以現有REMUS 600為基礎來開發符合MUUV需求的新載具;如果所有選項都執行,總值會達到3.58億美元。在此合約中,Leidos會與其他伙伴合作,如L3Harris Technologies。 黃鱔魚潛艦用MUUV技術 準備裝填到狄瓦爾號(USS Delaware SSN-791)核能攻擊潛艦魚雷管的 REMUS 600載具,封裝在一個膠囊容器裡;此一項目稱為「黃鱔魚」。 在2023年12月9日,美國海軍第32潛艇戰備中隊(Submarine Readiness Squadron 32)公布,維吉尼亞級核能攻擊潛艦狄瓦爾號(USS Delaware SSN-791)第一次完成黃鱔魚(Yellow Moray)水下無人載具從潛艦魚雷管發射與回收的端對端(end-to-end)測試。此時美國海軍並未公布「黃鱔魚」的具體細節,僅透露這是REMUS系列的衍生型號。依照稍後的資料,「黃鱔魚」是伍德霍爾海洋研究機構(Woods Hole Oceanographic Institution)配合MUUV從魚雷管施放/回收而開發的靠接技術項目,使用MUUV 600水下無人載具進行測試;而被封裝到密閉容器的水下載具稱為自主水下載具/抗震防火密閉膠囊(Autonomous Underwater Vehicle/Shock and Fire Enclosure Capsule,AUV/SAFECAP)。
2025年5月,更換受損組件的黃鱔魚UUV載具在挪威Haakosnsvern海軍基地 準備重新裝入照片後方的狄瓦爾號(SSN-791)潛艦。此時狄瓦爾號帆罩架起 腳手架進行維修工作,而此次裝填是透過潛水人員協助裝入魚雷管中。 在2025年5月29日,美國海軍發佈新聞,透露狄瓦爾號(SSN-791)核子動力攻擊潛艦成功在美軍歐洲司令部(EUCOM)轄區完成首次黃鱔魚UUV的作業,展示了在潛艦上部署無人系統與機器人裝備的可行性;在此次部署中,狄瓦爾號共三次放出黃鱔魚UUV進行作業,三次都是使用同一部載具,每次作業時間6至10小時,驗證了黃鱔魚UUV的可靠度;在這三次作業中,黃鱔魚UUV都能自主離開以及返回潛艦魚雷發射管,狄瓦爾號不需要派出潛水人員協助載具收放。美國海軍潛艦武力司令巴伯.高徹中將(Vice Adm. Rob Gaucher)表示,能從魚雷管收放的黃鱔魚UUV,延伸了潛艦的感測距離,無論是在更淺更靠近岸的水域或者大於潛艦作業深度的深海,而且減少了潛艦執行某些枯燥、骯髒、高危險任務(如水雷探測、情報蒐集、海床探測等)時面臨的風險。美國海真透露,狄瓦爾號在此次部署中,於2025年2月在挪威峽灣水域首度嘗試收放黃鱔魚載具,但要從魚雷管回收時,幾次嘗試都失敗;於是黃鱔魚載具先浮出水面,由附近支援船隻上的美國海軍技術專家檢查後,發現有個關鍵組件故障。為了避免影響潛艦部署期程與作業,美國海軍潛艦部隊(SUBFOR)先將這個UUV載具送回美國本土維修來更換失效部件。在隨後狄瓦爾號的部署活動中有另一個機會來操作UUV,因此SUBFOR將這具修復的黃鱔魚UUV送回,在5月狄瓦爾號停靠挪威Haakosnsvern海軍基地進行短暫修整時,由潛水作業人員從魚雷管將載具重新裝載上艦。在接下來的作業中,狄瓦爾號數次成功施放與回收這艘黃鱔魚UUV。 在2025年7月公布的2026財年美國海軍預算中,並沒有為黃鱔魚UUV編列任何經費;稍早在2025年2月10日,美國海軍宣布取消剃刀鯨UUV的潛艦魚雷管收放版本(MK20)。這可能是2025年1月川普總統展開第二任期後,國防部重整三軍各個項目來節省成本,因此由潛艦魚雷管收放的UUV遭到犧牲。雖然如此,美國海軍對從發展潛艦魚雷管收放的UUV仍有興趣;此外,2026財年預算中,還是為從DDS艙收放的剃刀鯨MK19編列400萬美元預算,用來為剃刀鯨載具購置新的「機密性籌載」。此外在2025年裡,黃鱔魚仍繼續進行測試,例如在2025年夏季進行與新一代REMUS 620 MUUV載具結合的乾端與濕端測試(見下文)。 REMUS 620 在2022年11月7日,杭亭頓.英格斯工業(Huntington Ingalls Industries,HII)公布了REMUS 620無人水下載具,作為REMUS 600的後繼型號。REMUS 620是HII發展來接替REMUS 600的新一代中型水下自航載具(MUUV),參照HII的新一代REMUS 300小型UUV(SUUV,見下文)的系統架構與理念,並整合了HII在2022年公布的最新型Odyssey自主航行軟體控制系統。REMUS300與REMUS 620的軟硬體架構以及能力,都依照美國海軍無人海事自航架構(Unmanned Maritime Autonomy Architecture,UMAA)來開發。REMUS 620的外部尺寸重量與REMUS 600相同,直徑324mm(12.75英吋)。 REMUS 620能根據任務續航力需求,使用三種不同構型的鋰電池組合(類似REMUS 300),並能快速更換充好電的電池模組;如使用容量最大的組合(三組電池段),能在水下持續工作110小時,航程275海浬。搭載合成孔徑聲納的構型之下,REMUS 620的電池模組能持續工作78小時,航行距離200海里。REMUS 620最大航速可達8節,導航誤差在行駛距離的0.1%以內。 REMUS 620的籌載採用模組化設計,標準任務籌載包括合成孔徑聲納(synthetic aperture sonar),並且能根據任務擴充或者更換其他多任務模組,包括情報蒐集、監視、偵察(Intelligence, Surveillance and Reconnaissance,ISR)以及支持密碼(cyber)與電子戰(electronic warfare)的模組等。REMUS 620設計具有通用艙口連結器,用戶或第三方開發者能根據HII公布的標準規格以及軟、硬體開發套件(SDK與HDK),自行開發相容的任務籌載並裝備於REMUS 620上。 REMUS 620擁有HII在2022年公布的奧德賽(Odyssey)先進自主航行軟體系統方案,並包括奧德賽任務管理軟體套件(Odyssey Mission Management Software)。奧德賽是一種開放式存取(open-access)的自主任務系統,符合政府架構(government-aligned architecture),能快速整合新感測器、任務籌載、第三方開發的無人自主技術等,具備多重代理群蜂能力(multi-agent swarming)、模組化任務籌載、有人-無人平台協同配合等能力。與REMUS 300相同,REMUS 620透過可攜帶SDD硬碟來儲存任務資料,支持WiFi無線網路以及銥衛星(Iridium)通信,其他操作選項包括視線內無線電傳輸、高速率資料傳輸、水下聲學資料鏈的數據機、光電數據機、插入Etnernet區域網路等。 REMUS 620能由潛艦、水面作戰船艦、兩棲船艦、小型有人或無人船艇、直昇機等平台攜帶部署;此外,REMUS620本身的籌載也有潛力容納小型無人航空機(UAV)或無人水下載具(UUV)等。依照HII的計畫,該公司第一部REMUS 620可望在2023年下水,在2023年底到2024年初交付客戶。REMUS 620顯然也會是UUSV項目的主要競爭者。 在2025年7月底,由HII、伍德霍爾海洋研究機構(Woods Hole Oceanographic Institution,WHOI)與美國海軍水下作戰中心紐波特紐斯分部(Naval Undersea Warfare Center Division Newport,NUWCDIVNPT)的團隊完成了REMUS 620與維吉尼亞級潛艦的武器處理、魚雷發射系統以及其他關鍵介面的相容性。在這項測試中,HII的REMUS 620新一代中型無人水下載具(MUUV)結合WHOI開發的「黃鱔魚」(Yellow Moray)對接停靠技術, 在維吉尼亞級潛艦彈艙整合設施(Virginia-class Cradle Payload Integration Facility,VCCPIF)中的MK-71潛艦533mm魚雷管完成了 自主水下載具/抗震防火密閉膠囊(Autonomous Underwater Vehicle/Shock and Fire Enclosure Capsule,AUV/SAFECAP)全彈(All-Up Round”,AUR) 的端對端(end-to-end)乾式檢測(dry checkout)。
2025年10月,REMUS 620載具在紐約席內卡湖進行水中端對端測試,利用一個 1:1維吉尼亞級潛艦魚雷管模型(包含發射外門)驗證載具從魚雷管出發與 回收靠接的能力,包含從模擬的魚雷管「反向游出」 接著,美國海軍繼續於夏季於測試設施進行REMUS 620的水中端對端(end-to-end)施放與回收測試;在2025年10月,WHOI與NUWCDIVNPT在位於紐約席內卡湖(Seneca Lake, NY)進行REMUS 620載具由魚雷管收放的水下評估測試,使用一個1:1維吉尼亞級潛艦魚雷發射器以及魚雷發射管外門(shutterway)測試夾具(test fixture)放在水下,並裝載一個SAFECAP容器,測試REMUS 620載具用於與SAFECAP對接所需的導航與通信協定進行驗證。在此次測試中,REMUS 620載具也成功展示了反向游出(swimout)發射以及分離;載具以「反向游出」從魚雷管出發可簡化魚雷管發射/回收作業;如果是「前向游出」(Forward swimout),載具回收後進入魚雷管後,需要在潛艦魚雷室內拆解與反轉才能進行下次發射(潛艦魚雷室空間有限,以REMUS載具的長度無法在不拆解的情況下直接反轉姿態),為此需要兩個不同的鎖定(latching)機構,分別在發射前於尾部約束載具,以及回收後從頭部約束載具。而採用「反向游出」則可讓載具在發射與回收作業中方向一致,不需要在魚雷室內拆解反轉,而且只需要一個鎖定機構。 在2025年9月中旬倫敦國際防務裝備展(DSEI 2025)期間,英國巴布克(Babcock)與HII簽署合作備忘錄(MoU),準備將HII的REMUS無人水下載具與巴布克的潛艦武器處理與發射系統(Weapon Handling and Launch Systems,WHLS)整合;巴布克與HII早在2023年就建立戰略合作關係,巴布克WHLS系統也被英國、加拿大、澳洲、西班牙與韓國潛艦採用。雙方的合作使搭載巴布克WHLS系統的潛艦,之後有潛力具備以魚雷管發射、回收REMUS載具的能力。 在2026年5月8日,HII宣布獲得國防部防衛創新單元(Defense Innovation Unit)的合約,研發部署在潛艦533mm魚雷管、能自動施放與回收水下自航載具(UUV)的 魚雷管發射與回收系統(Torpedo Tube Launch and Recovery)。
小型水下無人載具(SUUV) |

(上與下二張)杭亭頓.英格斯工業水下系統(HII UxS,前身為Hydroid)推出的REMUS 300
輕型無人水下載具,是廣為全球(含美軍)採用的REMUS 100的後繼型號。在2022年3月底,
REMUS 30正式被美國海軍選為下一代小型無人水下載具(SUUV),將取代基於REMUS 100
的美軍現役Mk18 Mod1劍魚載具。



HII集團人員測試REMUS 300載具的照片

REMUS 300載具在麻賽諸瑟州禿鷹灣(Buzzard’s Bay,Massachusetts)測繪出一艘沈沒帆船殘骸的聲學影像。

(上與下二張)HII、Kraken、VideoRay在2025年9月台北世貿航太國防展(TADTE 2025)聯合展出的
REMUS 300載具,可以直接插入加拿大Kraken公司的合成孔徑聲納(SAS)套件。攝於2025年9月20日


|
在2020年3月,美國國防部的國防創新部門(Defense Innovation Unit,DIU)分別與L3Harris Technologies和杭亭頓.英格斯工業(Huntington Ingalls Industries,HII)水下系統(HII Unmanned Systems,HII UxS,前身為Hydroid,註)簽署獨立合約,進行新一代小型無人水下載具(Small Unmanned Underwater Vehicle,SUUV)的快速原型發展(rapid prototyping)階段,為期兩年;SUUV項目是要取代美國海軍爆裂物與彈藥處理(Explosive Ordnance Disposal,EOD)單位使用的Mk18 Mod1劍魚(Swordfish)小型UUV(以REMUS 100為基礎)。快速原型發展作業包括完成原型SUUV,並完成特定任務有效載荷評估作業等,由DIU與美國海軍資訊作戰中心(Naval Information Warfare Center,NIWC)負責評估。其中,L3Harris Technologies以Iver 4型載具為基礎,HII UxS則提出REMUS 300。
在2021年8月3日美國海軍聯盟(Navy League)的海上/空中/太空年會(Sea Air Space
2021)上,美國海軍無人與小型作戰船艦項目辦公室旗下的遠征任務(expeditionary missions)項目主管Dan
Malatesta上校透露,此時美國海軍發展的中/小型UUV項目的研發工作進展順利,預計未來2至3年就能取代美國海軍現有三種中/小型UUV。其中,新的小型UUV(Small
Unmanned Underwater Vehicle,SUUV)項目代號是獅子魚(Lionfish),目標是取代Mk18
Mod1劍魚小型UUV;而新的中型UUV(MUUV)項目代號是蝰魚(Viperfish),取代水面操作的Mk18
Mod2王魚以及潛艦用剃刀鯨UUV。Malatesta上校透露,此時Mk18
Mod1劍魚小型UUV的發展餘裕(如計算機能量)基本已經耗盡,沒辦法再整合新的技術如感測器、自主航行套件等。 在2022年5月,SUUV項目完成第二次作戰測試評估,由一個海軍遠征水雷反制作戰(Expeditionary Mine Countermeasures Companies,ExMCM)營進行。
在2025年4月19日,HII宣布向美國海軍交付了首批兩具基於REMUS
300的獅子魚小型水下無人載具(SUUV);此合約如果後續選項都執行,美國海軍會購買200具獅子魚載具,合約總值擴充到3億4700萬美元。 REMUS 300 在2021年4月,HII UxS正式向市場推出REMUS 300;隨後在2021年6月,皇家紐西蘭海軍向HII UxS購買四具REMUS 300,成為此型UAV第一個外銷實績。在此之前,紐西蘭海軍已經操作REMUS 100 UUV達14年。依照DIU的SUUV快速原型發展合約,HII UxS在2020年2月交付第一部REMUS 300給美國海軍,進行開發與測試作業,在快速原型發展程序中不斷螺旋地增添新能力。在2023年11月20日,美國國防部宣布HII無人系統(HII UxS)獲得2300萬4606美元的合約增修,繼續生產獅子魚SUUV。 REMUS 300尺寸大致與要取代的Mk18 Mod1劍魚載具(REMUS 100)同級,可由兩人搬運攜帶,可執行的任務包括水雷反制(Mine Countermeasures,MCM)、搜索與救援(Search And Recovery,SAR)、快速環境評估(Rapid Environmental Assessment,REA)、水文研究(hydrographic survey)、再生能源探勘與海洋考古(renewables, marine archaeology)、海岸石油與天燃氣探勘(offshore oil and gas)、反潛作戰(Anti-Submarine Warfare,ASW)以及情報監視/偵察(Intelligence, Surveillance and Reconnaissance,ISR)。 REMUS 300的平台設計基於經過多年驗證的REMUS 100為基礎,融入最新的技術。REMUS 300的載具本體外型基本沿用REMUS 100的設計,但做了不少改進,包括強化結構、全面更新感測器、引進新的資料分配系統,以及引進開放式系統架構來整合各種不同任務模組。 在標準構型(3kWh電源模組)下,REMUS的長度約230cm、直徑19cm、重56kg左右;根據不同的任務構型,REMUS直徑從19cm到20.7cm,全長介於190至250cm,重量介於45.35kg(遠征任務)到67.58kg(長程任務)。REMUS 300的最大潛航深度比REUMS 100增加三倍而達到305m。 REMUS 300的推進系統包括一個直流(DC)無刷電動馬達(brushless motor),驅動一個三葉片螺旋槳推進器,持續航速5節。 電源方面,可根據任務需求選擇三種容量不同的鋰電池模組,分別是1.5k瓦時(Wh)、3kWh與4kWh三種;三者的鋰電池單元數量不同,長度與總容量也因此不同。電源的盲配合連接器(blind-mated)的端帽(end cap)符合IP-X4標準,允許在任務期間快速更換電池;此外,載具也能連結外部電源直接充電,包括110V與220V兩種電壓。航行控制系統包含十字形(Cruciform)舵面,進行縱向與橫向控制。根據裝備的鋰電池模組不同,REMUS 300載具的尺寸、重量與自持力分別如下: 1.5k瓦時(Wh)模組:載具長203cm、直徑19cm,重48.5kg,自持力10小時、最大航程55km,充電時間6小時。 3kWh模組(標準構型):載具長239cm、直徑19cm,重58.5kg,自持力20小時、最大航程105km,充電時間12小時。 4.5kWh模組:載具長264cm、直徑19cm,重70.3kg,自持力30小時、最大航程165km,充電時間18小時。
REMUS 300載具根據籌載艙段以及電池模組的不同,可分為四種構型
REMUS
300載具根據不同的任務需求,加裝長度不同的任務籌載段以及鋰電池模組,有四種構型: REMUS 300平台採用模組化設計,符合美國海軍模組化開放系統架構( Modular Open Systems Architecture,MOSA)以及無人海事自主航行架構(Unmanned Maritime Autonomy Architecture,UMAA)等規範。REMUS 300系統還對外提供軟體發展套件(Software Development Kit,SDK)與硬體發套件(Hardware Development Kit,HDK),因此能整合第三方開發的籌載或自主航行軟體。 REMUS 300配備新的HyFleet圖形化使用者介面,整合模擬器功能以及容量1TB的固態硬碟(solid-state hard drive);HyFleet具有很高的功能擴充性,能與許多現有應用程序相容,並快速整合新的模組與軟體。HyFleet提供了自動任務計畫驗證、拖拉式(drag-and-drop)介面功能,利於使用者快速設定任務計畫,並能同時監控多個REMUS載具。REMUS 300也具備載具介面程式(Vehicle Interface Programme,VIP),提供任務程式以及任務結束後的分析功能。 REMUS 300能根據任務需求,裝備多種不同感測器或任務籌載,開放式系統設計能迅速整合新開發的籌載、感測器以及演算軟體。載具可裝備的水聲感測器包括Marine Sonics的MK II Arc Scout雙頻(900/1800kHz)側掃聲納,解析度最高可達5cm,掃描寬度最大可達160m。此外,還裝備Klein MA-X的間隙填補(gap-filling )聲納、尼歐布朗海洋感測(Neil Brown Ocean Sensors, Inc.,NBOIS)的電導與溫度(Conductivity and Temperature,CT)感測器,以及TE Connectivity的深度聲納。REMUS 300的光電探測籌載包括Voyis的2G Robotics 4K HD靜態攝影機(stills camera)模組含高強度LED照明燈光棒,Seabird Scientific的Eco Puck Triplet環境感測器。REMUS 300的導航裝備包括iXblue Phins C3的慣性導航系統(Inertial Navigation System ,INS)、長基線(Long baseline,LBL)聲學定位、Garmin商用衛星定位系統或GB-Gram軍規全球定位系統(GPS)、包含Teledyne生產的相位陣列式都卜勒聲素計(Doppler Velocity Log,DLV,工作頻率300 kHz,附帶200m的深度鎖)的航位推測 (Dead reckoning)儀。通信傳輸包括伍茲霍爾海洋研究所(Woods Hole Oceanographic Institution,WHOI)的micromodem 2.0高頻(20~30KHz)水下聲學通信傳輸系統、Wi-Fi(2.4GHz)無線網路、Giga bits的Ethernet網路等,此外還能選擇裝備銥衛星通信(Iridium)。 加拿大遙控獵雷處置系統(RDMS)
在2022年12月7日,加拿大卡拉肯機器人公司(Kraken Robotics
Inc.)宣布獲得加拿大政府合約,負責研製遙控獵雷與處置系統(Remote Minehunting and Disposal
Systems,RMDS);此合約包括前24個月研發、產製並交付RMDS系統給加拿大海軍,會在2023年1月完成全部簽約並啟動,此外還包括交付後前五年的整合後勤支持(Integrated
Logistics Support,ILS)。如果採辦合約與初始的五年ILS合約都獲得簽署,總價值會超過5000萬加幣。 Iver4 900型潛艦用水下自航載具(AUV) |
L3Harris的Iver4 900型鋰電池推進水下自航載具(AUV),能由潛艦533mm魚雷管收放。

L3Harris的Iver4在水面船隻上進行測試。
|
Iver4 900型潛艦用水下自航載具(AUV) 在2024年11月12日,L3Harris宣布,將第一具量產型的Iver4 900型鋰電池推進水下自航載具(Autonomous Underwater Vehicle,AUV)交付美國海軍。Iver4 900型是一種中型水下無人載具,可由潛艦533mm魚雷管發射與回收(Torpedo Tube Launched and Recovered,TTL&R)部署收放,美國海軍又稱此型號稱為捕鼠器(Rat Trap)。Iver4 900可前出到潛艦前方水域進行偵察與情報蒐集,使潛艦能隱藏在相對安全的區域。L3Harris在2023年已經完成了此種載具原型在美國海軍潛艦魚雷管施放、回收的展示。在2026年3月25日,L3Harris宣佈獲得國防部國防創新單位(Defense Innovation Unit,DIU)合約,為美國海軍提供配合L3Harris Iver4 900水下載具的潛艦魚雷管發射與回收(TTLR)系統,整合在美國潛艦現有的標準533mm魚雷發射管。 Iver4 900是結合許多成熟商用與軍用技術的產物,任務包括長程偵察、情報蒐集、監視、水文研究、反潛作戰、水雷探測等,載具外殼由碳纖維與鈦合金等輕量高強度材料製造,長2.5m,載具本體直徑9吋,最大操作深度300m。載具前部有各種水下聲學與導航探測裝置,包括兩側的側掃聲納;載具中部有伸縮桅杆,裝置通信導航設備;載具尾部有十字形控制面,以及一個不秀鋼製三葉片螺旋槳推進器。推進系統是鋰電池驅動無刷直流電機驅動螺旋槳推進器,持續渡航速率3節以上,並能在短時間以5節加速航行。導航定位方面,載具在水面上操作時透過GPS衛星定位以及美國聯邦航空局開發的寬域擴增系統(Wide Area Augmentation System,WAAS)來修正船位,使用基於iXBlue PHINS的Compact C3光纖陀螺儀(fiber-optic gyroscope)為基礎的慣性導航(Inertial Navigation System,INS),並結合Nortek的都卜勒航速計(Doppler Velocity Log,DVL)來探測本身運動速率。載具上的任務籌載、裝備、電池等具備熱抽換(hot-swap)能力,能由潛艦人員迅速更換,利於長期持續任務。 能源方面,Iver4 900可以選用傳統的鎳氫電池 (Nickel-Metal Hydride,NiMH)或能量密度較高的鋰離子(lithium-ion)電池,使用鎳氫電池時續航力超過40海里,使用鋰離子電池時續航力則超過80海里。高密度鋰離子電池系統由Inventus Power提供,電池單元的壽命為8至10年(高於一般電池的3至5年),搭配L3Harris的改進型電池管理系統(Battery Management System,BMS),確保安全有效率的電源供應,整套系統已經獲得美國海軍武器系統爆炸安全審查委員會(Navy Weapon Systems Explosives Safety Review Board,WSESRB)通過審查;鋰離子電池可反覆充電使用,其能量密度高,能延長載具續航作業時間。 在2025年7月22日,Navy Lookout報導,皇家海軍機敏號(HMS Astute S119)先前在地中海作業期間,曾測試在潛航時從魚雷管發射與回收L3Harris Iver4載具。這項測試是Project SCYLLA的一部份,屬於澳洲-英國-美國三方同盟(AUKUS)的Pillar 2的範疇,也就是分享包含水下無人載具技術等關鍵戰略性技術。
註:Hydroid最初是美國伍爾霍茲海洋研究所(Woods
Hole Oceanographic
Institution,WHOI)一個發展水下自航載具的部門。WHOI在1990年代後期推出了REMUS水下無人載具系列,由海洋系統實驗室(Oceanographic
Systems
Lab,OSL)設計。REMUS事業部門在2001年從WHOI分割成為Hydroid公司,成為REMUS系列水下無人載具的主承包商。Hydroid在2007年被挪威Kongsberg購併,成為Kongsberg
Marine的子公司;在2020年3月,Kongsberg以3.5億美元的價格將Hydroid賣給HII,成為HII水下系統(HII
Unmanned Systems,HII UxS)。從2001年以來,REMUS系列UUV已經被25個國家採用,總共銷售超過500具。
|



