
大型水下自航載具/超大型水下自航載具(LDUUV/XLUUV)
美國海軍研究辦公室(ONR)主導進行的大排水量水下載具(LDUUV)創新海軍原型(INP)的模型,
此項目稱為蛇頭(Snackhead)。攝於2015年4月。經過幾年發展後,美國海軍LDUUV項目採辦策略經過調整,優先進行
快速採辦,以現成商規技術的載具為基礎結合政府單位主導開發的任務籌載和軟體來加快計畫進程並節省成本;但ONR的
LDUUV NPI蛇頭項目同時間仍持續進行。

一具LDUUV項目使用的測試載具,被用來展示海軍發展的無人指揮控制系統(Common
Control System,CCS)。
此照片攝於2015年12月美國海軍水下作戰中心(NUWC)位於華盛頓州普吉灣的鑰匙港(Keyport)。

在2022年6月8日,HII在帕斯卡古拉河(Pascagoula River)的Ingalls造船廠水域 展示了該集團建造的
法羅斯(Pharos)水下載具收放系統(LAR),利用HII的普特羅斯載具進行展示。法羅斯 是一個小型
機動式沈降平台,可搭載與施放/回收有人或無人載具。隨後HII用法羅斯LAR測試收放
蛇頭LDUUV載具。

HII的法羅斯(Pharos)水下載具收放系統(LAR)近照

在2021年,賓夕法尼亞州立大學應用物理實驗室(APL Lab/Penn State)建造了LTV 38載具
,是LDUUV的快速原型與實驗(RAPx)測試平台。LTV 38是直徑38吋的平台,海上系統司令部
還規劃建造直徑更大的LTV 48與LTV 54的原型平台。

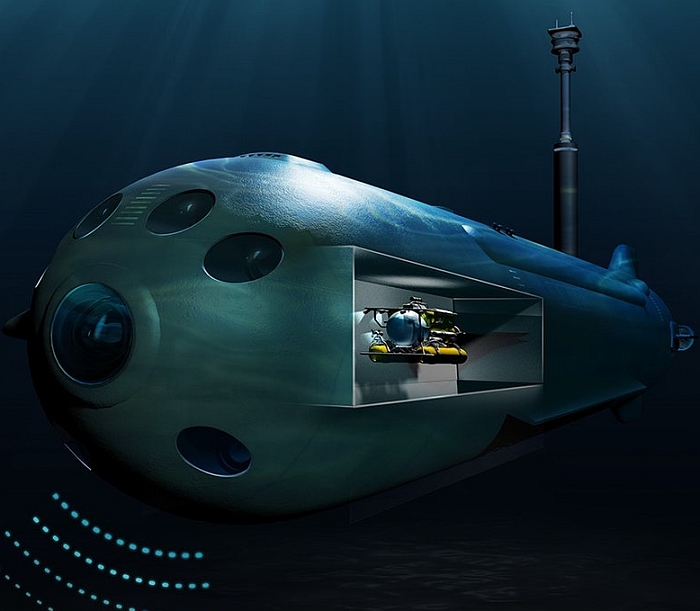
美國海軍海上系統司令部(NAVSEA)公布的「蛇頭」LDUUV想像圖。

(上與下)第一艘「蛇頭」LDUUV載具於2022年2月2日在紐波特紐斯的納拉甘西特灣測試設舉行命名下水儀式。


洛克希德.馬丁集團的馬林魚(Merlin)自航水下載具(AUV)。洛馬集團以馬林魚載具為基礎,投入美國海軍
超大型水下自航載具(XLUUV)項目的競爭。

(上與下二張)波音集團的回聲探險家號(Echo Voyager)大型水下載具。在2019年2月13日,波音獲得美國海軍
價值4300萬美元的合約,以回聲探險家號為基礎,建造四艘超大型水下自航載具(XLUUV)項目的原型
供美國海軍測試,稱為虎鯨(Orca)。


虎鯨(Orca)水下無人載具的想像圖。

(上與下二張)在2022年4月28日,首艘XLUUV虎鯨原型載具在加州杭廷頓海灘下水。



整備中的虎鯨原型載具,桅杆處於半升起狀態。
在靜態水池測是的虎鯨原型載具
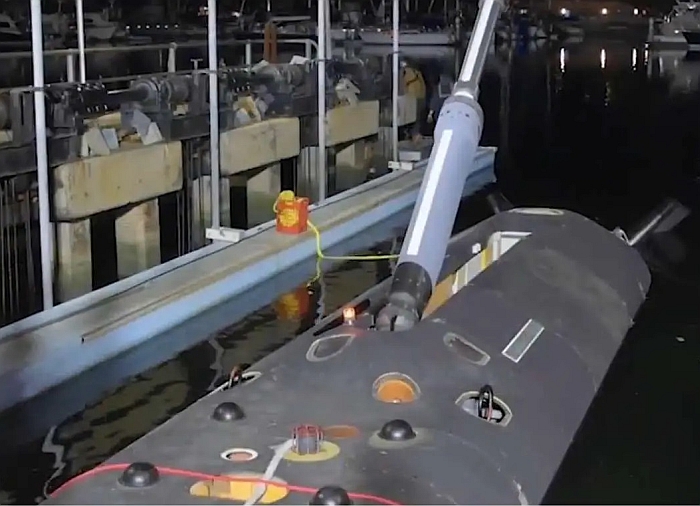
在測試階段的虎鯨原型載具,可以看到背部的桅杆。
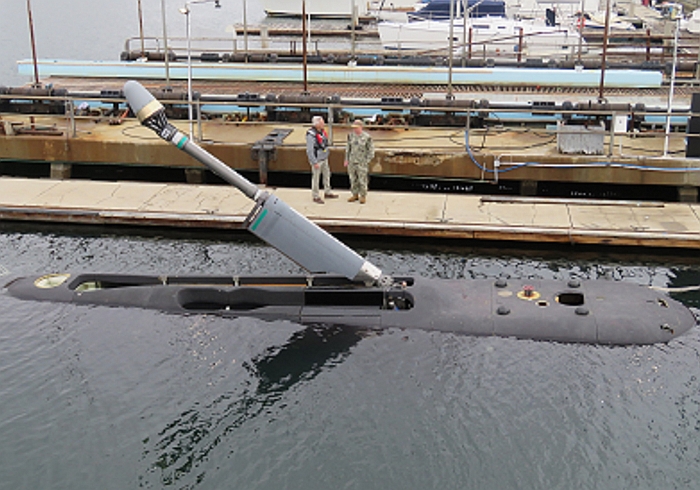
停靠碼頭的虎鯨原型載具,桅杆升起。

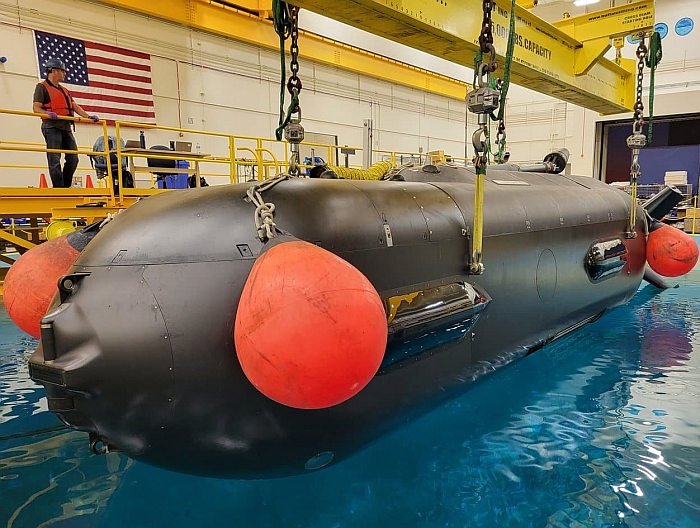
2024年6月中旬,美國海軍首次公布加裝模組艙段的虎鯨原型載具。

(上與下)2024年12月6日,美國海軍作戰部長麗莎·弗蘭凱蒂(Adm. Lisa Franchetti)視察在船廠的虎鯨原型載具。


安杜里爾(Anduril)的Dive-LD大型自主水下載具

安杜里爾在2025年9月台北航太與國防展(TADTE 2025)中展出的Dive LD大型水下自航載具模型。

在2026年5月3日,澳洲C2 Robotics公司舉行美國製造的首艘矛牙(Speartooth )大型水下無人載具的洗禮儀式。
──By Captain Picard
|
LDUUV起源 在2000年代,美國海軍就開始研究大型無人水下載具(Large Displacement Unmanned Underwater Vehicle,LDUUV)領域,這種無人載具能從港口碼頭自行出航,渡航出海執行超水平線的近海任務,然後自動返回港口,不需要由船隻載運到作業海域收放。這種能自行航行操作的水下載具能擴展美國海軍的傳感範圍,延伸艦隊的作業區域,成為美國海軍未來作戰的戰力加成器。而由於LDUUV不需要配置人力,可取代部分傳統有人潛艦、船艦的勤務,以最具成本效益的方式拓戰美國海軍的作戰範圍。 在2004年,美國海軍展開無人水下載具框架計畫(UUV Master Plan),著重於模組化設計,能以相同的技術框架來增加載具的尺寸範圍;而這個框架計畫就實現了LDUUV的終端定義。 LDUUV創新海軍原型(INP): 在2011年,ONR向業界發佈一項跨部門公告(Broad Agency Announcement,BAA),開始發展LDUUV的創新海軍原型(Innovative Naval Prototype,INP)。這個LDUUV INP計畫打算發展大排水量無人水下載具的各項關鍵技術,需能讓載具在海中自主操作至少70天。其中,被列為LDUUV關鍵領域的包括:近岸自主操作(autonomy in the littorals)、能源系統(energy systems)、持久科技(Endurance Technologies)等三項。 關於自主操作,LDUUV INP計畫以兩階段執行: 階段1(Autonomy Phase
I):發展LDUUV所需的自主操作軟硬體,能在近海環境自行持續執行任務達30天,作業周邊水域中的船隻都在30噸級以上。而如果周邊環境過於複雜,則可透過銥衛星電話(Iridium)等通信技術尋求外部操作者協助(Operator
assistance )。 在上述LDUUV INP計畫兩階段中,ONR希望獲得完整的無人自航技術方案,具備以下關鍵能力: 1.水下障礙迴避(Undersea Obstacle Avoidance):自動探測周邊水下態勢環境、移動的水下障礙與物體,並能自動進行機動迴避;而計算迴避路線的演算法必須將過程中的能量消耗降到最低。 2.水面障礙迴避(Surface Obstacle Avoidance):自動探測周遭的水面船隻並予以識別,自動計算目標位置與動態(包含吃深度)並規劃迴避路徑,同時依照預先設定的計畫進行通信(依照預設的風險評估要素,以及幾個優先進行通信的航路選項)。 3.水面船艦意圖(Surface Vessel Intent):依照探測資訊,判斷周圍水面船艦可能形式與行動,包括漁船、軍艦、娛樂用船、商船等。先進自主航行軟體在計算最佳化的航道時,會考慮探測到的周遭船隻類型與動態,規劃迴避航道時也兼顧維持執行任務。 4.捕魚探測、迴避以及脫困(Fishnet Detection, Avoidance, and Extraction):必須具備可探測各種漁網、漁具的新感測器(現有的感測器通常難以探測漁網),並發展能夠自動迴避漁具、或者在遭到漁網纏繞後脫困的演算法。此外,載具硬體也必須能將被漁網纏住的機率降到最低。
由於在自主航行期間可能遇到許多超出預期的挑戰,因此自航技術必須具備彈性,以應付未預期的情況。 在2015年,國防部海軍研究辦公室(ONR)頒佈合約給通用動機電磁系統(General Atomics Electromagnetic Systems,GA-EMS)以及賓夕法尼亞州大學(Pennsylvania State University)的應用物研究實驗室(Applied Research Laboratory ,PSU-ARL),負責研究與測試先進永磁(permanent-magnet)推進馬達,PSU-ARL長年支持美國海軍以及ONR的水下推進系統研究測試工作。在2018年2月中旬,消息傳出GA-EMS獲得ONR的合約,為LDUUV項目設計製造先進永磁推進馬達;在接下來18到20個月時間,GA-EMS會設計、製造、測試這種先進永磁馬達(測試工作在PSU-ARL)進行,完成後交付ONR。
LDUUV通過里程碑A 在2015年8月17日,美國海軍海上系統司令部(The Naval Sea Systems Command,NAVSEA)接收到LDUUV計畫的降低風險決意(risk-reduction decision approval),也就是通過里程碑A(Milestone A)。通過里程碑A意味上級批准項目進入到下一個階段,允許海軍投注資源使技術成熟化,並在正式量產與部署之前採取各種降低風險的措施。LDUUV的主管機關是NAVSEA主管近海作戰船艦的專案辦公室(Program Executive Office Littoral Combat Ship,PEO LCS)下屬的無人海上系統計畫辦公室(Unmanned Maritime Systems program office,PMS 406)。PMS 406表示,LDUUV的功能涵蓋情報、監視、水雷反制等任務,整個設計基於模組化、開放式架構,能根據任務選擇裝載不同的裝備籌載。 美國海軍研究辦公室(Office of Naval Research,ONR)將LDUUV設計成一種籌載卡車,能迅速安裝或抽換搭載的任務籌載,執行廣泛的任務,並且能透過裝載更新技術的任務模組而擴充能力。依照此時規劃,LDUUV能由多種不同的平台搭載施放與回收,例如從維吉尼亞級核能攻擊潛艦的維吉尼亞籌載模組艙段(Virginia Payload Module,VPM)、從俄亥俄級核能巡航飛彈潛艦(SSGN)的發射管、核能潛艦用來攜帶潛水特戰部隊的乾式掩體艙(Dry Deck Shelter,DDS)、由船舶拖曳等等。LDUUV的任務將涵蓋情報/監視/偵察(Intelligence, Surveillance and Reconnaissance, ISR)、聲學監視、反潛作戰、反水雷作戰、攻勢作戰等等。LDUUV計畫的主管機關是PEO LCS下屬的無人海上系統計畫辦公室(Unmanned Maritime Systems program office,PMS 406)。依照此時規劃,LDUUV的直徑約是48吋(121.92cm)。 達成里程碑A之後,美國海軍發出LDUUV的需求徵詢書(Request For Proposal,RFP)草案,並在2015年9月14日於華盛頓的無人海上系統計畫辦公室(Unmanned Maritime Systems Program Office,PMS 406)向業界簡報關於LDUUV的需求,希望在2017財年達成早期作戰能力(Early Operational Capability,EOC),包括將三艘LDUUV原型轉換成使用者作業評估系統(user operational evaluation systems),並開始發展相關的戰術、技術與程序。LDUUV預計在2022財年達成初始作戰能力(Initial Operational Capability,IOC),在2025財年進入全速率生產。然而,隨後LDUUV INP項目的經費遭到刪減,使得技術發斬成熟、部署都遭到延後,並導致計畫的整體成本可能因而增加。 通過里程碑A後,LDUUV項目的開放市場競爭持續到2016年初期。在2016年3月,海軍海上系統司令部(NAVSEA)宣布改變LDUUV的採辦計畫,不再從業界尋求方案,改由海軍水下作戰司令部(Naval Undersea Warfare Command,NUWC)來主導LDUUV原型的設計和製造工作。依照原本的計畫,ONR希望能促進相關技術發展成熟、將最新技術交付艦隊,同時政府主導的降低風險作業也一併進行。 在2016年,美國海軍在2016年測試LDUUV INP項目的原型測試載具,主要是自主導航、探測與迴避等自航技術,測試航線從舊金山到聖地牙哥。這個原型載具項目被PMS 406無人海上系統計畫辦公室命名為蛇頭(Snakehead)。 2016年DSB的下一代無人水下系統研究報告 在2016年1月,美國海軍海上系統司令部委託一個聯邦諮詢委員會(Federal Advisory Committee)──防衛科學委員會(defense Science Board,DSB)為主,針對LDUUV等水下無人系統項目進行審查,稱為下一代無人水下系統(Next-Generation Unmanned Undersea Systems)研究報告;此報告在2016年10月19日公布,並在2016年12月7日在國防部的安全審查辦公室( DoD Office of Security Review )公開。 這份DSB的報告認為,現有的LDUUV項目可能會步上先前UUV計畫的後塵,採辦計畫發生問題然後取消。此報告表示,過去美國國防部以類似傳統大型武器系統平台(如潛艦、水面船艦、飛機)的計畫模式來發展各型無人載具(包含水面與水下等),研發程序過於緩慢,且價格不斷升高,導致能採購的數量大幅減少,根本無法滿足作戰需求,最後導致計畫取消;過去美國海軍已經有不少前例,包括 部署於潛艦魚雷管的近期水雷偵察系統(Near-term Mine Reconnaissance System,NMRS)、長期水雷偵察系統(Long-term Mine Reconnaissanc System,LMRS)以及21吋可重構任務水下載具(Mission Reconfigurable UUV,MRUUV)等。這些前車之鑒顯示,同一時間內如果只有執行一個無人載具計畫,則這個系統的任務需求就會不斷膨脹,被要求能同時執行許多任務,結果導致系統複雜度與單位成本水漲船高,研發進度延遲,然後終於遭到取消。而這份DSB的報告認為,現行的LDUUV計畫模式也與上述失敗的前例類似 (為了這個專案而從頭開發專門的載具以及軟硬體),因此雖然LDUUV的確是一個需求殷切的項目,但預估的交付成本將十分昂貴,導致最後只能訂購很少的數量,在一段時間內能用於執行實驗和執行任務的LDUUV數量將十分稀少,最終計畫難免遭到取消。DSB的報告也認為,原有的LDUUV計畫並沒有妥善應用美國海軍過去在無人自航載具領域已經有的成果,例如先前已經成立了一個名為海上開放架構無人自航(Maritime Open Architecture Autonomy,MOAA)。先前國防部針對自航載具的研究就已經強調,自航技術應避免專為特定對象發展專屬軟體。 DSB報告建議,LDUUV應調整採辦策略,參考美國海軍現有一些快速部署交付、成本較為低廉的成功案例模式,例如水下快速能力提案(Undersea Rapid Capability Initiative,URCI)、以商規現成載具技術為基礎的Mk-18 Mod 1劍魚(Swordfish)和MK-18 Mod 2王魚(Kingfish)水下無人載具、為潛艦與魚雷聲學感測系統升級的先進處理器建設/聲學快速商規插入套件(Advanced Processor Build/Acoustic Rapid Commercial-off-the-Shelf (COTS) Insertion,APB/ARCI)計畫等。這些案例大量使用成本較低、可快速交付的商規現成(COTS)技術,而且相關發展成果能夠用在艦隊中不同使用設群的裝備。例如,MK-54輕型魚雷與MK-48潛射重型魚雷就透過通用魚雷發展計畫(Common Torpedo Development Program,CTDP),使兩者導引與尋標系統的APB/ARCI升級程序共通,不僅節省研發成本、加快進度,而且生產採辦的批量也因而增大,降低了單位成本。 因此,DSB報告建議,LDUUV的載具應該採用商規現成產品(價格低廉且有助於縮短開發時間),不要花費大量成本從頭發展專用載具;而任務籌載則結合商規現成技術以及政府專門發展的技術。這種新發展採辦策略使得政府資源能集中在關於UUV任務能力的發展(包括任務籌載、軟體等),降低單位成本並加快進度,使整個計畫可以支持更多次數的實驗與任務,使美國海軍能更充分深入瞭解與利用無人水下系統以及相關技術。
關於LDUUV在幾個技術領域的發展方向,DSB報告也提出了分析與建議。首先,無人水下系統受到幾個長久以來的技術瓶頸制約: 2.自主航行:長時間與外界隔離以及通信手段受限,對無人水下載具的自主導航設計構成很大的挑戰。 4.部署與回收:如果考慮到潛艦部署,則現有的發射管尺寸(如VPM模組或DDS艙)限制了無人水下系統的尺寸。此外,部署施放相對容易,但如何讓潛艦或水面船艦順利回收船艦依舊困難費事(例如先前LMRS與NMRS由潛艦的21吋魚雷管施放與回收,需要比較複雜的工程設計,提高了技術難度並降低可靠度)。 DSB報告認為,關於無人水下系統的關鍵技術發展、突破瓶頸等努力,經常受到潛艦設計觀念的制約;例如,潛艦極端重視匿蹤,而且先天上設計成可擔負多任務並獨立運作的平台,整個系統自然龐大、複雜且昂貴。然而,無人水下載具(UUV)的最佳應用卻是群集作業,每個載具只擔負有限度的功能,而且先天上UUV的態勢感知與能源條件就遠不如載人潛艦。現有許多UUV計畫的需求都過於複雜,強調多任務能力以及水下航行安全(subsafe),以及重視匿蹤能力,這些延續自潛艦的思維會導致UUV變得過於複雜昂貴,不僅技術發展的挑戰變大、研發期程拉長而使成本因通貨膨脹而高昇,高昂的單價使得能採購的數量大幅減少,自然無法大量部署運用。 因此,DSB報告建議,UUV計畫應依循低價系統(low-cost system)的模式,著重可負擔的數量規模,使美國海軍能大量購置與運用。基於低價導向,一些過去對水下無人系統的重大技術制約如隱匿性、部署時間等都可以重新思考,使得整體方案變得不那麼複雜與昂貴;例如,匿蹤對低價UUV而言,並沒有像大型有人潛艦平台那樣重要。而由於UUV無須人員操作,加上若能大量採購,損失單一的UUV載具並不是那麼嚴重。基於以上考量,對於無人水下系統領域的長期技術制約,可以做以下的重新思考:
1.關於通信和無人自主航行(Communications/autonomy):放寬關於匿蹤性能的要求,允許UUV週期性地浮出水面,利用一般的寬頻無線電(RF)等手段進行通信與資料更新,而不是拘泥於持續待在水下、只能以頻寬和距離受限的水下聲學資料鏈傳輸。增加寬頻通信能建立更可靠的人機合作,而更多地獲得有人平台的支持也能使自主航行的技術要求適度放寬,同時增加了無人水下系統的可靠度與可信賴度,更重要的是降低了成本。
2017年:LDUUV採辦方向調整 在2017年4月初舉行的美國海軍年度海上、空中、太空展(Sea-Air-Space exhibition)中,海軍主管水下無人系統的PMS 406辦公室副主管Howard Berkof表示,LDUUV項目接下來分為兩個並行的計畫,其中一個是繼續發展所需的軟體與自航技術,另一個則是無人系統快速採辦(rapid acquisition)計畫,盡快獲得現成、已驗證的水下載具,首艘能在2019年下水;艦隊獲得載具後,就能立刻展開各項操作實驗與訓練,透過這些經驗回饋到未來正式LDUUV以及其他一系列UUV族系的計畫。LDUUV發展採辦策略的修正,顯然參考了2016年DSB的下一代水下無人系統研究報告的建議。 Howard Berkof表示,在前一年(2016年),美國海軍決定由海軍水下作戰中心(Naval Undersea Warfare Center, Newport)擔任蛇頭(Snakehead)LDUUV項目的系統整合領導工作,以加快發展進度。民間業界也已經參與這個計畫,包括動力系統、感測系統等方面;然而同時間,美國海軍本身仍會持續設計與整合一種全新的載具。Howard Berkof也透露,為了加快整個LDUUV項目的發展,除了蛇頭LDUUV本身仍然必須達到以往採辦計畫的里程碑(milestones)之外,美國海軍高層已經決定放棄一些傳統計畫的程序要求,為計畫的發展開通一條筆直道路。 而在2017年海上、空中、太空展的簡報之後,Howard Berkof也向美國海軍研究所(USNI)透露,雖然LDUUV計畫經過調整來加快進度,不過海軍研究辦公室(ONR)仍會持續進行「蛇頭項目」LDUUV創新海軍原型(INP);此時,ONR打算建造兩艘LDUUV INP載具,其中一部用於空機展示,另一部則將配置海軍水下武器中心(NUWC)位於華盛頓州普吉灣(Puget Sound)的鑰匙港(Keyport)的UUVron中隊,持續累積操作經驗。ONR會持續利用LDUUV INP載具進行研發努力,特別是軟體、自主航行以及指揮控制等技術。ONR持續發展兩艘LDUUV,或許發展到某一個階段,就會移交給PMS 406無人海上系統計畫辦公室。 依照Howard Berkof在2017年海上、空中、太空展簡報中公布的美國海軍水下系統願景(UUV Systems Vision)示意圖,在第一階段(Phase 1)計畫中,現有的蛇頭(Snakehead)LDUUV INP項目的重點聚焦在情報與環境準備(Intelligence and Preparation Of the Environment ,IPOE),以及情報/監視/偵察(Intelligence, Surveillance and Reconnaissance,ISR);而在第二階段(Phase 2)中,蛇頭LDUUV載具會繼續擴充任務範圍,並且增加籌載處理系統( Payload Handling System ,PHS),並整合到由潛艦搭載的乾式甲板掩體艙(Dry Deck Shelter,DDS)中。最終蛇頭「增量1」(Snakehead Increment 1)會拓展任務籌載,範圍涵蓋電子戰(應需要靠近水面伸出桅杆)、佈雷與水雷反制、反潛作戰、反水面作戰等。LDUUV系統的基本組成包含導引與控制、導航、自主航行、態勢感知(Situational Awareness,SA)、核心通信、電力產生與分配、推進與迴旋、載具收容與支持等相關設備,以及用來支持IPOE任務的感測器套件。「蛇頭」LDUUV能裝備於LCS濱海作戰船艦,提供情報以及環境準備(Intelligence and Preparation of the Environment,IPOE)、情報/監視/偵察(Intelligence, Surveillance and Reconnaissance,ISR)等功能。 依照2018年6月29日參議院的報告,美國國防部2019財年預算計畫中,將加快LDUUV與超大型水下載具(XLUUV)的期程。美國國防部2019財年預算中,為LDUUV項目申請9261萬3000美元預算來建造兩艘LDUUV第一階段(Phase 1)原型。同時,海軍也通知國會,LDUUV的採辦策略已經改變,將刪除原本採辦策略的第二階段(Phase II),第一階段(Phase 1)的設計則直接移交給業界進入實際設計建造工作,使得整個計畫期程比原先提前五年。因此,原訂的LDUUV第二階段就不再申請預算。對此,參議院武裝委員會原則上支持計畫期程加速,但同時也對於改變計畫期程表達部分憂慮;因此,參議院武裝委員會建議,縮減LDUUV第一階段的範疇,然後加速將LDUUV設計移交給業界。 LDUUV原型載具 依照2018年10月的消息,海軍發言人Alan Baribeau對媒體表示,蛇頭LDUUV項目已經完成第一階段(Phase 1)系統初步設計審查(system preliminary design review),而細部設計則正在進行。針對Phase 1的初步設計審查(Preliminary Design Review,PDR)顯示各項設計都符合系統要求,風險以及預算因素也都在可接受範圍;而軟體發展也按照期程進行;而細部設計審查(Detailed Design Review)會在2019財年第三季進行。美國海軍原本希望蛇頭LDUUV第一階段(Snakehead Phase 1)的載具能在2019年內下水,然而由於在2017與2018財年國防預算對蛇頭項目的支持不足,第一艘蛇頭LDUUV下水期程已經延後到2021財年第一季;至於蛇頭LDUUV第二階段(Phase 2)載具的具體時間表則取決於2019財年的預算。 在2019年2月5日,通用原子電磁系統(General Atomics Electromagnetic Systems,GA-EMS)宣布,獲得美國海軍先進國際技術項目(Advanced Technology International,ATI)合約,為「蛇頭」LDUUV項目研發與製造容錯鋰離子電池系統( Lithium-ion Fault Tolerant,LiFT)的展示原型。「蛇頭」LDUUV使用LiFT來為推進與輔助系統提供電力,能在嚴苛的作業環境下長時間可靠地運作。LiFT系統採用模組化設計,並採用首見的被動式安全機制(不仰賴主動式機制,如使用冷卻系統來避免過熱);萬一個別電池單元發生故障,也不會因而發生失控的連鎖性鋰離子電池失效。 在2020年6月16至17日,美國海軍海上系統司令部(NAVSEA)舉辦了線上的LDUUV項目虛擬業界日,總共有超過50家相關廠商代表參與這次線上會議;參考業界在線上會議提供的意見,NAVSEA在2020年10月29日提出了「蛇頭」LDUUV的RFP草案。在2020年12月23日,NAVSEA發布了LDUUV項目第二階段(Phase 2)的最終需求徵詢書(Final RFP);依照最終RFP內容,在2021財年會與一家合作夥伴簽約,設計發展並製造兩艘「蛇頭」LDUUV Phase 2原型載具。 在2021年,賓夕法尼亞州立大學應用物理實驗室(The Applied Research Lab/Penn State)完成大型訓練載具(Large Training Vehicle,LTV)LTV 38(直徑38英吋),是LDUUV的快速原型與實驗(Rapid Prototyping and Experimentation,RAPx)平台。依照NAVSEA PMS 406無人海事系統辦公室在水面船艦協會2022年年會(SNA 2022)的資料,打算製造一系列尺寸不同的LTV快速原型載具,包括LTV 38(直徑38英吋)、LTV 48(直徑48英吋)與LTV 54(直徑54英吋)。
2022年2月2日,第一艘「蛇頭」LDUUV載具舉行命名下水儀式。 在2022年2月2日,美國海軍水下作戰中心新港紐斯分部(Naval Undersea Warfare Center(NUWC) Division Newport)以及小型無人載具項目辦公室(Program Executive Office for Unmanned and Small Combatants,PEO USC)在紐波特紐斯的納拉甘西特灣測試設施(Narragansett Bay Test Facility)舉行了第一艘「蛇頭」大型水下無人載具(LDUUV)的命名擲瓶儀式。 在2022年7月21日,蛇頭LDUUV從羅德島州的納拉甘西特灣測試設施(Narragansett Bay Test Facility)完成了一項情報以及環境準備(Intelligence Preparation of the Operational Environment,IPOE)任務情境的端對端(end-to-end)展示,包括從納拉甘西特灣設施自主航行出發到作業區、在預定作業區域以聲納進行搜索,然後返回納拉甘西特灣;這項展示驗證了蛇頭載具使用的技術,包括由德雷珀大學實驗室(Draper Laboratory)發展的海事開放自主航行架構(Maritime Open Architecture Autonomy),以及由賓夕法尼亞州立大學應用研究實驗室(Pennsylvania State University Applied Research Laboratory)開發的聲納系統。IPOE是蛇頭LDUUV項目的重要里程碑,驗證此載具在想定的作戰環境下作業時的軟體與硬體表現;完成IPOE之後,蛇頭載具接下來的發展是朝向擴展航程作業、其他附加系統的能力等。從2021年到2022年7月下旬,蛇頭實驗載具總共執行了155次航次,總共實際在海中作業的時數達78小時,而載具本身軟硬體的封閉迴路模擬測試累積時數則達190小時。 服役支持 在2021年6月,美國海軍正式發布一份工程代理責任文件(Engineering Agent Responsibility Document, or EARD),決定由海軍水下作戰部門阿拉斯加鑰匙港分部(Naval Undersea Warfare Division Keyport)作為海軍幾種無人水下載具的服役工程代理(In-Service Engineering Agent,ISEA),主管進入美國海軍服役的各型水下無人載具的壽命週期支持保障,包括虎鯨(Orca)水下無人載具、LDUUV、由潛艦搭載的乾式掩體艙(Dry Deck Shelter,DDS)收放的Razorback水下無人載具等。 美國海軍取消/恢復LDUUV 在2022年4月美國海軍提出的2023財年預算申請時,卻要求取消蛇頭LDUUV計畫,理由是此型載具的設計以及採辦活動,以經偏離了由潛艦搭載部署的需求,導致蛇頭載具能搭配的操作平台十分有限;此外,LDUUV成本超支與期程延誤,影響到此載具的部署以及與維吉尼亞級核子攻擊潛艦的整合工作,限制了進一步投資的可能性。蛇頭LDUUV項目第一階段(Phase 1)只完成了一艘原型載具;而美國海軍估計,如果取消蛇頭項目第二階段(Phase 2),能在2023財年節約1.859億美元,在未來五財年國防計畫(Future Years Defense Plan)能節省5.168億美元。至此,LDUUV項目已經經過14年發展,近期投資超過2億美元。 蛇頭載具的體型尺寸過大,直徑約4英尺(1.22m),長度為7至8英尺(2.13~2.44m),現有美國海軍潛艦無法直接整合部署(例如裝在魚雷發射管裡)。此時蛇頭載具部署在潛艦上的唯一可能選項,是利用收容特戰部隊人員與裝備的乾式甲板掩體艙(Dry Deck Shelter,DDS,搭載於潛艦上部);美國海軍先前規劃與特種部隊司令部(U.S. Special Operations Command)合作,修改三個DDS艙使其能收容蛇頭載具,原訂分別在2022、2023與2026年完成。
(上與下)HII設計建造的法羅斯(Pharos)施放/回收系統(LAR), 是個用來搭載UUV的沈降平台,並裝有車輪,能直接在陸地由拖車頭拖運
為了部署操作各型UUV載具,HII設計建造了法羅斯(Pharos)施放/回收系統(Launch and Recovery,LAR),基本上是一個搭載UUV的小型機動式沈降平台,可由船艦運送(如裝在船塢運輸艦的乾塢),在水域中LAR,然後由LAR沈降來施放或回收UUV;法羅斯平台底部甚至裝有車輪,可以在陸地上直接由拖車頭在道路拖運,並且能直接沿著傾斜的船台直接放入水中。在2022年6月8日,HII Ingalls船廠在帕斯卡古拉河(Pascagoula River)水域首次展示了法羅斯 LAR的作業,施放與回收一個HII的普羅特斯(Proteus)載具。 在2022年9月1日,美國海軍水面作戰中心巴拿馬市分部(Naval Surface Warfare Center Panama City Division,NSWC PCD)與HII達成一項合作研究與發展協議(Cooperative Research and Development Agreement,CRADA),測試與驗證法羅斯LAR施放與回收LDUUV載具的能力。首先,HII船廠完成法羅斯LAR收放蛇頭載具的測試評估;準備就緒之後,NSWC PCD的無人系統測試評估團隊(Unmanned Systems Test and Evaluation Team)根據與HII的CRADA協議,再加上NUWC紐波特紐斯分部(NUWC Newport)的協助,發展與執行一項法羅斯LAR配合LDUUV的複雜展示測試作業,稱為無人水下載具施放與回收測試(UUV LAR Testing)。 在2022年7月20日,消息傳出參議院武裝部隊委員會(Senate Armed Services Committee)打算在2023財年國防授權法案中立立法,要求海軍繼續執行蛇頭LDUUV項目,並編列1億美元預算;參議院武裝部隊委員會的報告指出,儘管此項目的期程與預算控制不理想,但委員會仍相信蛇頭LDUUV項目部署後仍會是美國海軍的重要作戰能力。 隨後在參眾兩院通過的2023財年國防授權法案(NDAA 2023)中,國會支持海軍取消LDUUV項目的要求,但仍對UUV技術的發展表達重視,要求軍方優先採辦業界現成、具備長自持力/多任務籌載能力與自主航行等能力,並將海軍與陸戰隊的作戰概念整合到現成商規UUV上。 因此在2024財年預算中,美國海軍又將蛇頭項目UUV納入RDT&E預算,在2024財年編列690萬美元,最低限度地持續「蛇頭」原型載具的研發與測試工作;依照2024財年預算,LDUUV項目的研發工作打算編列到2028財年之後。不過,LDUUV原訂進行的第二階段(Phase 2)的原型發展作業遭到取消;依照2023年4月12日Breaking Defense報導,美國海軍發言人Alan Baribeau回覆該媒體表示,LDUUV的第二階段業界原型發展作業取消,未來LDUUV採辦策略目前由美國海軍重新評估,而美國海軍則持續進行計畫、研發與實驗工作。依照美國海軍的資料,由於缺乏預算,原訂在2022財年執行的業界原型開發競爭作業停頓,並沒有執行。在2023年4月4日海上-空中-太空展(Sea Air Space, SAS2023)中,海軍LDUUV項目主管史考特.席爾拉斯上校(Capt. Scot Searles)表示,此後LDUUV的發展方向,是整合到維吉尼亞級的多任務籌載模組(Virginia Payload Module,VPM,每個可容納7枚戰斧巡航飛彈)以及新一代SSN(X)核子動力攻擊潛艦之中,以VPM模組作為施放、回收LDUUV的主要工具。 國防部創新單位徵詢商規UUV提案 在2023年6月30日,美國海軍海上系統司令部(Naval Sea Systems Command,NAVSEA)以無人海上系統計畫辦公室(PMS 406)的名義發佈一個來源徵詢(Sources Sought)需求,包括尋求可能的現成商業大型水下無人載具(LDUUV)以及相關的時程與成本分析,能讓海軍盡快部署,最快希望能在2024財年就部署。這項徵詢符合2023財年國防授權法中,國會要求海軍優先尋求商業現成商規UUV的條文。 在2023年7月14日,美國國防部的國防創新單位(Defense Innovation Unit,DIU)發佈一個線上徵詢(solicitation),向業界徵求一種大直徑、可擴展(scalable)、相對低價的水下無人自航載具,能持久在水下航行作業,並能攜帶關於戰場情報準備(Intelligence Preparation of the Environment,IPOE)以及水下/海床作戰(Subsea and Seabed Warfare,SSW)的任務籌載。DIU要求要回覆的提案是商規現成產品,而且能快速評估、測試與演示。回覆此項需求的截止期限是7月28日,之後交給美國海軍紐波特水下作戰中心(NUWC Newport)進行第二階段(Phase 2)評估;在第二階段被選中的提案會進行實際的水下演示,證明能達到宣稱的能力,測試週期約三星期。
此份徵詢要求這種大直徑水下載具(LDUUV)具備水下自主航行能力,能在軍事作戰的固有環境下作業。希望擁有的任務能力包括在水下保持定點位置、座底、航路標定導航能力(waypoint
navigation)、障礙物迴避、施放籌載、情報/偵察/監視(Intelligence, Surveillance and
Reconnaissance,ISR);此種載具必須能從水面平台施放與回收,而且不需要特定的收放系統。回覆的提案必須基於開放式系統架構,能整合進新的軟硬體。 籌載方面,此種載具必須輕易整合各種籌載(含軟硬體方案),籌載能擴展載具的操作特性或者直接控制載具。籌載的機電、邏輯介面(logical interfaces)需要以非專有標準(non-proprietary standards)的定義以及文件,以利安裝與卸除。對於籌載的空間、重量、動力需求(Space, Weight and Power,SWAP)如下:載具至少提供2立方公尺的內部容積來容納籌載,包含至少0.5公尺長/寬/高的連續空間,高度至少0.6m,垂直佔地面積至少0.6 x 0.8公尺;能在載具頂部或底部加掛籌載,但不需要在同一趟任務中同時加裝頂部與底部籌載;載具重量(乾重量)至少300磅(136kg)並維持中立浮力(neutrally buoyant),載具能為籌載供應400W電力;任務籌載是政府供應的軟硬體。此外,要求具備能跟水下、水面與空中平台傳輸的模組化通信系統。 在2024年2月8日,美國國防部國防創新單位(DIU)宣布,已經選擇三家廠商團隊發展LDUUV,著重於部署用於海下與海床作戰的任務籌載。三家廠商分別是海洋工程國際(Oceaneering International)、康斯堡探索(Kongsberg Discovery)以及安杜里爾工業(Anduril Industries),三家廠商必須完成各項技術評估,並在2024年3月進行演示。
康斯堡探索的HUGIN AUV無人自航載具 其中,康斯堡探索的提案以該公司的HUGIN AUV載具系列中最大型的HUGIN Endurance為基礎,長度39英尺(11.89m),寬48英吋(119.38cm),能持續作業15天,在沒有外界控制的情況下獨自1200海里以上的岸到岸(shore-to-shore)航行。 HUGIN系列最主要的HUGIN Superior長度22英尺(6.7m),直徑35英吋(88.9cm),能持續作業70小時。 HUGIN AUV系列結合康斯堡的各型感測器,具備作戰環境情報準備(Intelligence Preparation of the Operational Environment,IPoE) 、水雷反制(Mine countermeasure,MCM)、海床作戰(Seabed Warfare,SBW)以及描繪海底地形等能力。 在2025年4月5日,安杜里爾(Anduril)公布,已向美國海軍交付第一艘Dive-LD大型自主水下載具給第一無人水下載具中隊(UUVRON-1),UUVRON-1的任務是操作和發展水下無人載具,用於情報、監視、偵察(ISR)和其他海軍的任務。Dive-LD長5.8m、直徑1.2m、重2720kg,水下航速約2至7節,能持續在水下作業10天,最大潛航深度6000m,具備模組化的籌載設計,能搭載各種感測器籌載進行長程水下監視、戰場情搜以及指揮安杜里爾的銅斑蛇(Copperhead)水下自主攻擊載具集群進行作戰等功能。 在2027財年美國海軍申請書中,包括申請購買45艘安杜里爾的Dive-LD大型水下無人載具(LUUV)。 在2026年5月3日,澳洲C2 Robotics公司舉行第一艘為美國製造的矛牙大型水下無人載具(Speartooth Large Uncrewed Undersea Vehicle)的洗禮儀式;此外,該公司也與歐洲伙伴Eurobotics GmbH在另一個海外銷售項目中合作。C2 Robotics宣稱,「矛牙」是一種可擴縮、符合成本效益的水下無人載具,用於情報/偵察/監視(ISR)以及打擊任務;利用較小的體積與低成本,能在競爭的作戰環境下作業並大量部署,這是傳統有人平台做不到的。「矛牙」具有類似魚雷的修長外型,採用X尾舵以及泵噴推進器。
依照美國海軍的無人水下系統願景圖(Navy UUV systems vision chart),XLUUV項目首先專注在任務籌載的系統整合工作以及佈雷作戰,爾後也會發展水雷反制、反潛作戰、反水面作戰、電子作戰、打擊等相關能力;中、長期發展方面,LDUUV會成為一種情報監視偵察(ISR)平台,不過也能透過選擇任務模組來執行上述不同的作戰任務。 ONR規劃建造第二艘XLUUV INP載具,同時間美國海軍海上系統司令部(NAVSEA)的PMS 406無人海上系統(Unmanned Maritime Systems)項目辦公室也進行作業打算在2017年內發出關於建造的需求徵詢書(RFP)。XLUUV項目的發展模式將與LDUUV,由ONR以及無人系統計畫辦公室(Unmanned Systems Program Office)負責,形成齊頭並進的體制,而各單位所有關於原型系統的研發工作,最後會產生一種使用多種任務籌載、可擔負多種任務的載具。 最初美國海軍打算只讓LDUUV成為快速採辦項目(rapid-acquisition project),但隨後XLUUV也被改成快速採辦,採用現成商規載具,依照海軍的需求以及提供的任務籌載介面來發展;而XLUUV載具系統隨後被命名為虎鯨(Orca) 。由於LDUUV要求能從水面船艦與潛艦部署收放,但XLUUV則是自行從碼頭出發往返,不僅不需要考慮從船艦、潛艦上施放與回收的技術挑戰,而且尺寸比較不受限制,這或許是比較晚出現的XLUUV採辦程序反而比LDUUV進展更快的原因。
XLUUV第一階段(Phase 1) 在2017年10月,美國海軍與波音與洛馬集團參簽署合約,由兩家團隊針對XLUUV項目,各自發展載具系統以及相對應的技術資料包;其中,與洛馬集團簽署的合約價值4320萬美元,與波音簽署的合約則為4230萬美元。兩家團隊各有15個月的工作時間,美國海軍會在2018年12月進行關鍵設計審查(Critical Design Review,CDR),審查兩個團隊提交的方案。 針對海軍XLUUV採辦項目,波音以該集團的回聲航海家(Echo Voyager)載具為基礎來發展,長度51英尺(15.545m),寬度與高度皆為2.6m,總重約45.36噸,最大操作深度11000英尺(3352.8m),最大渡航速率8節,持續作業速率2.5~3節,能持續在海中作業航行至多6500海里而不需要外來支援。回聲航海家載具可利用的籌載空間長度涵蓋34英尺(10.363m),籌載容積(含任務模組有效荷載空間)為2000立方英尺(56.63立方公尺),籌載重量約8噸。其導航系統採用經過驗證的卡爾曼濾波慣性導航單元,並由都卜勒測速器和深度傳感器提供信息。回聲航海家的高度穩定性為0.25m,深度穩定性為0.3m,LBL輔助定位精度2.3m,無輔助定位精度為航行距離的0.15%。回聲航海家的基本籌載包括雷松(Raytheon)的PS60-6000合成孔徑聲納,基本能力包括 前後配平控制、海底繫泊能力、由前視聲納(FLS)實現主動障礙迴避能力,以及含經驗學習的自主避障算法。 在2017年10月中旬,波音無人系統先進技術計畫(Advanced Technology Programs for Autonomous Systems)的主管Lance Towers向美國海軍研究所(USNI)透露,相較於使用較小的UUV載具,XLUUV會大幅降低美國海軍使用無人水下載具執行同類任務的成本。XLUUV能完全自主航行以及從港口基地渡航往返,不需要透過船艦載運到任務區域部署及回收;透過水面船隻或潛艦攜帶UUV載具到任務海域施放及回收,相關作業不僅更昂貴,而且作業受到惡劣天候或附近敵意船隻的制約。Lance Towers表示,波音現有最大型的回聲航海家UUV系列已經經過充分海上驗證、配合波音自己開發的傳感器進行過測試。回聲航海家基本上是一種無人的柴電潛艇,可以自力航行上千海里,配備柴油發電機與電池,潛航時使用電池供電推進,潛航一段時間後會浮出水面自動啟動柴油機為電池充電。Lance Towers進一步說明,XLUUV項目的快速採辦程序有別於其他傳統的計畫;傳統的計畫模式首先有專門的設計定義階段(由美國海軍本身單位負責),大約會花費2至3年以上,完成之後才向業界徵詢提案。Lance Towers表示,在這種快速採辦程序中,廠商與海軍的密切溝通極其關鍵,不只是關於技術規格,也包括清楚瞭解海軍對於整個計畫的目標與意圖。隨著XLUUV項目進展,波音的回聲航海家號載具會在2018年初再次進行測試,繼續驗證此行載具對嚴苛水下作戰環境的適應能力。 而洛克希德.馬丁集團則以馬林魚自航下載具系統(Marlin Autonomous Underwater Vehicle,AUV)系統為基礎,此型載具長度約10英尺(3.048m),先前的用途包括結構研究(structural surveys)、海底管線檢查、海底殘骸研究、水下設施檢查等,配備高解析度、高精確度的探測與測繪設備,產生海底3D掃描、地質參考模型等。在先進水下無人系統以及海洋身測繪技術領域上,洛馬集團有超過40年的豐富經驗,曾經產製過28艘載人的潛水載具以及超過150艘遙控水下載具。 依照2018年6月29日參議院的報告,美國國防部2019財年預算計畫中,將加快LDUUV與XLUUV的期程。在2019財年國防預算中,XLUUV項目申請了1億1785萬6000美元預算,包含發展XLUUV載具,美軍太平洋司令部(U.S. Pacific Command)聯合應急作戰需求(Joint Emergent Operational Need,JEON)的相關的任務籌載。此時,美國海軍已經與兩家競爭廠商(波音與洛馬)簽署XLUUV第一階段(Phase 1)的設計競爭合約,並在2018年在競爭者中進行評估選擇(Phase 2);在2019財年預算中,美國海軍曾並通知國會,海軍將同時向兩個競爭團隊授予第二階段(Phase 2)的製造合約;不過到最後,美國海軍還是在兩家競爭者中挑選了波音,進入第二階段。
XLUUV第二階段(Phase 2) 為了運用無人水下載具,美國海軍成立了水下無人中隊(Unmanned Undersea Squadron,UUVRON-1),計畫在2020年達到全戰備能力,預定在2024年配備包括LBS-UUV、LDUUV、XLUUV等各型UUV共45艘。 依照2021財年美國海軍預算書,美國海軍研究辦公室(Office of Naval Research,ONR)會展開一個無人水下武器系統項目稱為CLAWS,發展的無人潛艇結合感測器、武器系統等任務套件,而且具備自行以武器交戰的能力而無須人工介入。 在2019年一場會議中,美國海軍提出利用大型UUV水下載具來施放膠囊魚雷,獵殺敵方反潛作戰資產,保護美國海軍艦隊、潛艦的安全。從2019年起,美國海軍就開始發展名為「錘頭鯊項目」( Hammerhead program)的膠囊水雷(使用MK-54魚雷),未來也將部署在LDUUV、XLUUV等大型水下無人載具上。 依照2020年7月29日美國國會報告,美國海軍在2019財年編列五艘XLUUV原型並與波音簽署生產合約,進行初期的研發測試,從2023財年開始以每財年兩艘的速率編列XLUUV(在2021、2022財年都沒有訂購)。 在2020年9月30日,在一個美國海軍線上集會中,主管小型水面船艦與無人水面船艦的海軍少將Casey Moton透露,會在2021財年發布中型水面無人水下載具(Medium Unmanned Undersea Vehicle,MUUV)以及蛇頭LDUUV項目第二階段(Phase 2)的合約。 照2020年12月10日美國海軍部公布的2022財年的五年期造艦計畫(five-year Future Years Defense Program,FYDP,2022至2026財年),美國海軍打算在2022至2026財年編列12艘大型無人水面船艦(LUSV)、1艘MUSV中型水面船艦(MUSV)、8艘超大型無人水下載具(XLUUV)。其中,XLUUV從2023到2026財年都是每年編列2艘。 美國海軍計畫在2019財年編列的首批五艘XLUUV原型(由波音建造)之後,在2024年起繼續訂購XLUUV。 在2022年3月26日,美國國防部宣布與波音簽署價值7250萬美元合約繼續發展虎鯨(Orca)超大型水下無人載具,包含各項與設計、製造、測試有關的活動、工具、裝備、材料等,此合約執行到2023年8月。 在2022年4月28日,首艘XLUUV虎鯨原型載具在加州杭廷頓海灘(Huntington Beach)下水。在2022年5月25日加州蒙特利(Monterey, California)舉行的第15屆水雷作戰協會國際海事科技座談會(15th International Mine Technology Symposium of the Mine Warfare Association)上,美國海軍海上系統司令部無人海洋系統(Unmanned Maritime Systems)主管Scot Searles上校表示,「虎鯨」XLUUV載具是以波音回聲遊俠(Echo Ranger)水下自航載具為基礎放大發展而來;「回聲游俠」載具全長51英尺(15.545m)。「虎鯨」排水量80噸,是一種採用開放系統架構、可重構的水下無人載具;核心載具內建導引、控制、導航、自動航行控制、態勢感知、核心通信、動力能源、推進與迴旋、能源分配以及任務感測器等;「虎鯨」本體長度51英尺(15.545m),中間可加裝長度34英尺(10.363m)的籌載模組艙,使全長達到85英尺(25.9m),可攜帶的模組籌載8噸。虎鯨載具的最大水下航速8節,以3節速率航行的續航力6500海里。首艘虎鯨載具的任務籌載艙設計可以來佈放水雷 。Scot Searles上校表示,美國海軍已經決定基於虎鯨載具的技術,增加另一個XLUUV工程發展原型(Engineering Development Model,EDM),稱為XLE-0(首艘原型),作為降低風險研發活動的一環。 依照2022年9月美國審計組織(GAO)的報告,每艘XLUUV載具由四個模組分段構成,並且在載具停泊於水中時就能直接更換電池與任務載具(無須進入乾塢);如果任務需要增加續航力或者滿足籌載電力需求,還可增加額外電池。
在2022年4月28日,首艘XLUUV虎鯨原型載具在加州下水。
在2023年7月18日,波音公布虎鯨原型載具試航的視頻。 XLUUV第三階段(Phase 3) XLUUV第三階段(Phase 3)則可能是選擇繼續建造四艘虎鯨系列載具,但是採辦不會早於2024財年。此外,XLUUV最快估計能在2024財年完成所有政府測試工作,轉入採辦類型(Acquisition Category,ACAT)項目。 依照2023財年美國海軍預算申請書,XLUUV項目在未來五年期發展計畫(FYDP,2023到2027財年)打算編列六艘,其中在2024、2025財年各編列一艘,2026與2027財年各編列兩艘。此進度比先前的規劃放緩。 XLUUV項目落後與超支 在2022年9月,美國政府審計組織(GAO)提出一份關於XLUUV的報告:超大型水下無人載具:海軍需要改進管理措施確保平順地交付艦隊(EXTRA LARGE UNMANNED UNDERSEA VEHICLE Navy Needs to Employ Better Management Practices to Ensure Swift Delivery to the Fleet);其中提到,XLUUV原型項目(擔負水下佈雷任務)的進度,比原訂期程落後三年,並且超支2.42億美元。在2019年3月,美國海軍與波音簽署合約,以波音的回聲探險家型(Echo Voyager)水下自航載具為基礎發展XLUUV並製造、交付五艘給美國海軍。 GAO報告指出,美國海軍將這五艘波音的XLUUV視為原型,但同時也打算盡快將這五艘原型艇用於作戰任務(水下佈雷),以滿足2015年美國海軍公布的一項聯合緊急作戰需求(Joint Emergent Operational Meed ,JEON),要求發展先進佈雷平台;因此,美國國防部與海軍是以滿足緊急的軍事作戰需求為名義採購這五艘XLUUV原型。依照最初合約內容,首艘XLUUV原型需在2020年12月交付(簽約後近兩年),此合約是固定價款加激勵(fixed-price incentive contract),預算上限是2億8150萬美元(含技術手冊等文件)。 依照美國海軍2023財年的預算書記載,XLUUV項目包括原本訂購的五艘原型之外,在2022年3月又額外新增一艘水下測試載具(價值7300萬美元,列入2023財年採辦),採辦成本總共達到6億2100萬美元;這艘額外增購的測試訓練載具稱為第零號載具(Vehicle 0,即XLE-0),主要用於前期的降低風險研究等。新增加的測試載具結合了部分XLUUV最終型號的特徵,但不含模組化籌載艙;而XLE-0顯然就是2022年4月28日下水的首艇,先對載具設計進行測試,之後再建造具有任務籌載的全功能型號。到2022年6月,XLUUV項目已經花費5.04億美元,並要求增加1.17億美元;而原始預算(2016財年)估計為3.79億美元,因此整體預算上漲為2.42億美元(含2022年3月追加的測試載具的7300萬美元),超支幅度高達64%;這個數字還只是美國政府支付的超支部分,不包括廠商自行吸收的部分,因此實際超支數字還要更高。除了超支之外,交付期程也比原始合約延後三年。原訂首艘XLUUV在2020年12月交付,全部五艘在2022年(日曆年)結束前交付完畢;然而此時,首艘XLUUV交付期程推遲到2024年2月,全部五艘在2024年6月交付完畢。 GAO報告批評美國海軍,在採辦前期沒有要求廠商展示技術備便程度,在缺乏相關信息的情況下就貿然簽署合約;結果隨後承包商針對美國海軍需求進行大量的修改,花費的時間與成本就大大超出最初合約內容(2019年2月到3月簽約);GAO報告稱,在2018年10月通過關鍵設計審查(Critical Design Review,CDR)以來,XLUUV承包商已經向美國海軍提交了超過1500項設計偏差需求(deviation requests)調整設計。如此龐大的修改量,導致美國海軍必須在2022年3月增購一艘測試用的簡化版XLUUV載具,先針對載具本身技術進行測試。在2022年9月28日,美國海軍官員向美國海軍研究所(USNI)新聞透露,此項目大部分延誤是COVID19疫情導致的生產問題,例如電池供應、鈦合金材料供應、合格的焊接工人等都面臨短缺。 在2024財年,美國海軍為XLUUV項目申請1億403萬美元研發預算,並為發展無人水下載具(UUV)核心技術(不限於XLUUV)申請7120萬美元額外預算;此外,美國海軍申請以其他採辦(Other Procurement, Navy OPN)帳戶來訂購三XLUUV,從2026至2028財年都各訂購一艘XLUUV,成本分別是1億1330萬美元(FY2026)、1億1560萬美元(FY2027)以及1億1790萬美元(2028財年)。 在2023年8月2日,波音透露虎鯨XLUUV原型載具已經完成了初期航海測試。在2023年12月20日,波音宣布首艘虎鯨XLUUV原型載具(XLE-0)在本月完成接收測試後,已經交付美國海軍。在2023年,美國海軍組建了第三水下無人載具中隊(Unmanned Undersea Vehicle Squadron 3,UUVRON-3)來操作波音的虎鯨載具,部署在加州文圖拉郡(Ventura County)海軍基地。 在2024年1月美國海軍水面艦協會年會(Surface Navy Association,SNA 2024)中,無人海事系統項目辦公室(Unmanned Maritime Systems Program Office,PMS 406)主管史考特.席爾拉斯上校(Capt. Scot Searles)表示,此時虎鯨號XLUUV原型載具已經完成一些初步測試如控制、推進、2023年12月進行的自主航行測試等,前面還有15至16項測試要進行,包括測試載具上的所有感測器,以及自主避碰以及其他與任務相關的能力。史考特.席爾拉斯上校也透露,美國海軍預計在2024年接收波音製造的後續五艘(第二至第六艘)虎鯨XLUUV原型;依照2024財年美國海軍預算計畫記載, 第二艘虎鯨XLUUV載具此時已經製造完成,後續四艘(第3至第6艘)會在2024年第三季製造完成。 在2024年12月,第二艘、也是第一艘擁有完整任務能力的虎鯨載具(XLE-1)已製造完成,在Marina船廠進行各項碼頭與航行測試,2025年初交付美國海軍,並在2025財年第三季交付美國海軍進行發展與作戰測試(Developmental and Operational Testing,DT/OT);完成DT/OT後,負責操作虎鯨載具的美國海軍第三水下無人中隊(UUVRON-3)會完成人員認證,使XLE-1備便進行作戰部署。 除了虎鯨載具之外,UUVRON-3中隊以及UUVRON-1中隊在2024年也測試安杜里爾(Anduril)公司開發的Dive-XL大型水下無人載具(另有專文介紹);這是安杜里爾公司用為澳大利亞海軍超大型水下自航載具(Extra Large Autonomous Undersea Vehicles,XLAUV)項目開發的「鬼鯊」(Ghost Shark)原型載具技術為基礎而推出的版本。由於虎鯨載具項目受落後超支所苦,美國海軍在2025年4月另外啟動CAMP項目LUSV(見下文),並在2026年3月選擇了安杜里爾的Dive-XL,而虎鯨載具也在2025年底遭到取消(原本簽約訂購的四艘仍會完成)。 在2026年3月7日,第二艘完整構型(XLE-2)的虎鯨交付。首艘純粹用於驗證的XLE-0在2023年交付美國海軍,而第一艘具備完整任務構型的XLE-1在2025年交付,兩者間隔一年半到2年;而XLE-1與XLE-2的交付間隔約一年。 2025財年:項目推遲 在2024年3月11日,美國海軍公布2025財年預算申請書;受到財政責任法(Fiscal Responsibility Act,2023至2025財年)的限制,2025財年國防預算限制在8950億美元以內。在預算限制下,海軍著重於艦隊備便率以及人員預算以因應當前的作戰任務(主要是2023年底開始的紅海護航作戰任務),使得造艦計畫以及幾個研發項目的預算比前一年縮減,例如2025財年編列建造的新艦僅6艘。 在2025財年,美國海軍為超大型水下無人載具(XLUUV)項目申請3100萬美元研發預算(包括XLUUV項目本身研發工作的2150萬美元,以及相關核心技術所需的6820萬美元研發經費),並為大型無人水面載具(LUSV)申請5400萬美元研發預算,兩者都比2024財年申請的預算(2024財年XLUUV為1億400萬,LUSV預算為1億1700萬美元)大幅減低;海軍部主管預算的助理部長班.雷納德少將(Rear Adm. Ben Reynolds)表示,這是因為LUSV與XLUUV項目都發生落後,所以被重新調整期程。由於廠商面臨的挑戰以及供應鏈問題,在2023至2025財年,XLUUV項目的測試與交付以及其他支持要素都發生落後,海軍與主承包商波音正設法彌補落後的進度,並且以一艘在2023財年增加編列的測試與訓練載具(即Vehicle 0)進行降低風險測試。 依照2025財年預算,美國海軍預計以其他採辦(OPN)項目名義,在2026至2029四個財年分別購買1艘XLUUV,預算分別是1億1330萬美元(2026財年)、1億1560萬美元(2027財年)、1億1790萬美元(2028財年)與1億2040萬美元(2029財年)。 2025年:自主海洋作戰平台(CAMP)項目啟動 在2025年4月中旬,美國國防部創新團隊(Defense Innovation Unit)公布了一份名為自主作戰海洋平台(Combat Autonomous Maritime Platform,CAMP)的大型水下無人載具(UUV)招攬信息(solicitation),能夠裝載與支持大型籌載並擁有長續航力。此份招攬信息稱,現有UUV的能例如航程、籌載能力受到限制,限制了在某些作戰場景下的部署能力。CAMP預計能支持一系列廣泛任務,能在競爭環境(contested environments)中將作戰效能最大化。CAMP項目命名是紀念前美國海軍太平洋艦隊作戰系統主管(Director of Warfare Systems, U.S. Pacific Fleet)里查.坎普(Richard Camp)。 依照此份文件記載,五角大廈正在尋求一種現成商業系統,擁有1000海里以上的航程,作業深度可達200m,可執行的任務包括水下研究、情報蒐集、部署多種任務模組等,例如將各種籌載投擲部署到海床。依照文件中進一步的敘述,CAMP要能再GPS拒止(GPS-denied)的環境下維持有效的自主航行跟遙控作業,具備量好的成本效益以及可量產能力,能部署投擲的籌載尺寸從長度5英尺(152.4cm)直徑19吋(18.26cm),到長度21英尺(6.4m)直徑21英吋(53.3cm)。 在2026年3月12日,安杜里爾(Anduril)發佈聲明,該公司被國防創新單位(DIU)與美國海軍選為CAMP項目合作伙伴,在簽約後四個月完成原型載具的性能展示。安杜里爾以該集團先前為澳洲XLAUV項目發展的Dive-XL載具為基礎來發展CAMP提案,成為波音的虎鯊之後美國海軍第二型XLUUV。 RAS專責助理部長設立/虎鯨載具取消在2025年9月3日,川普總統任命的美國海軍部長約翰.費蘭(John Phelan)發出一份備忘錄,指示建立主管機器人與自主系統(Robotics and Autonomous Systems,RAS)的專責助理副部長(Deputy Assistant Secretary,DASN),以及所屬的項目執行辦公室(Program Executive Office,PEO)和採辦執行辦公室(Portfolio Acquisition Executive,PAE);這項改革是回應川普總統在2025年6月簽署一道「發動美軍無人機宰制優勢」(Unleashing U.S. Military Drone Dominance)的行政命令、加速將無人系統整合到美軍的行動。這項變革標誌著一個轉捩點,美國海軍將全力精簡採辦程序,著重於交付與作戰有關的系統,克服先前美國海軍幾個主要無人系統項目發展時面臨的一些結構性與協調性問題,統籌協調所有在執行的專案。 依照2025年11月18日USNI報導,機器人與自主系統採辦辦公室(Portfolio Acquisition Executive Robotic Autonomous System,PAE RAS)會在接下來五年內,統籌管理先前分屬於18個不同辦公室、總共66個海軍無人系統項目(總價值約190億美元),並直接向主管研究/發展與採辦(Research, Development and Acquisition,RDA)的海軍助理部長(中將階)報告。 依照規劃,PAE RAS成立後的第一項工作是執行MASC的競爭程序,以及擔負先前複製者倡議(Replicator Initiative)中的國防自主作戰群(Defense Autonomous Warfare Group,DAWG)的採辦責任。此外,PAE RAS初期還將會結束面臨嚴重延誤的波音虎鯨(Orca)原型載具項目,此外也會取消剛開始執行未久、由黑海公司(Black Sea)負責的全球自主偵察艇(Global Autonomous Reconnaissance Craft,GARC)項目。PAE RAS這些初期規劃呼應了美國戰爭部長皮特.赫格賽斯(Pete Hegseth)在11月7日演說中提到的「加速交付是現在的主軸....如果我們的戰士喪命、國家蒙受損失,是因為這些必須的裝備延遲交付,我們就失敗了....我們的緊迫感已經喪失太多,當你面對當前所處的情況,我們必須重新奪回」。 不過,已經與波音簽約製造的前五艘虎鯨載具還是會依約完成。
|
\





