青花魚號傳統動力實驗潛艦
青花魚號(USS Albacore AGSS-569)實驗潛艦剛下水時的畫面,注意其有如魚雷一般的淚滴型艦殼。

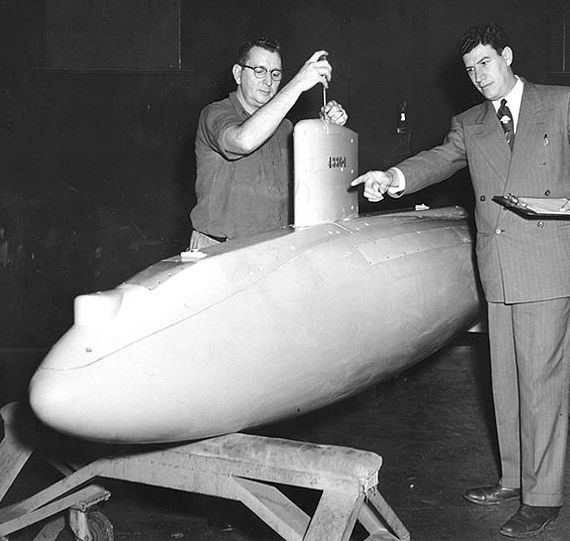
(上與下) 美國海軍選擇青花魚號船型時,做了很多船模的水槽與風動測試。
此照片攝於蘭利空軍基地的風洞。


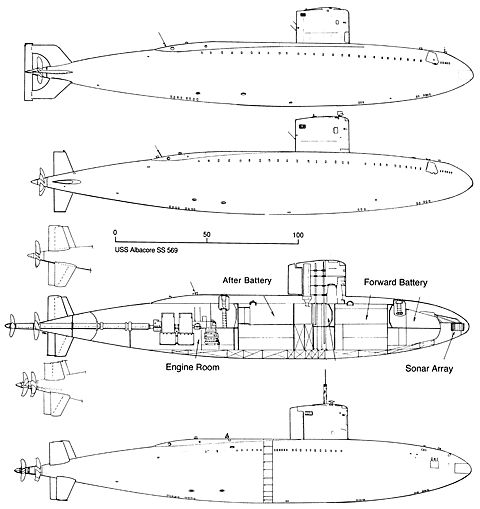
攝於1954年4月5日的青花魚號,此時構型為最早期的Phase 1,帆罩後方設有背舵,尾部控制面設置
在螺旋槳推進器後方,可以看到艦尾的舵面支撐結構。艦首設有一對水平舵,平時可向上折收。
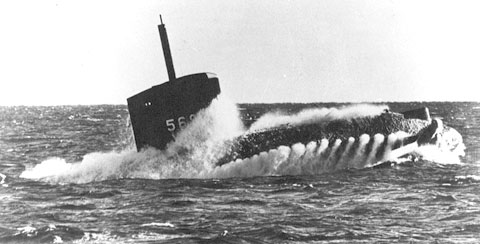
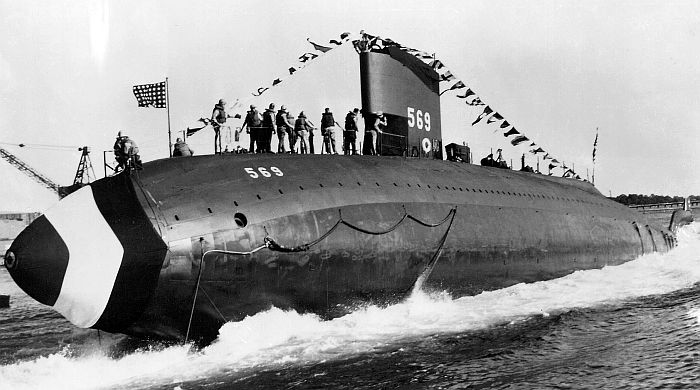
浮航中的青花魚號,攝於1954年
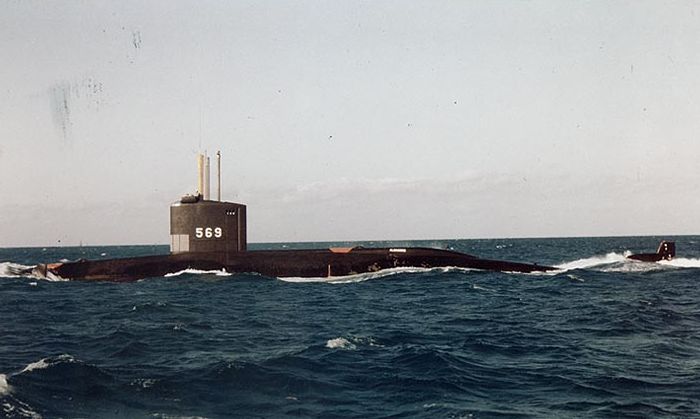
浮航中的青花魚號,攝於1955年10月。
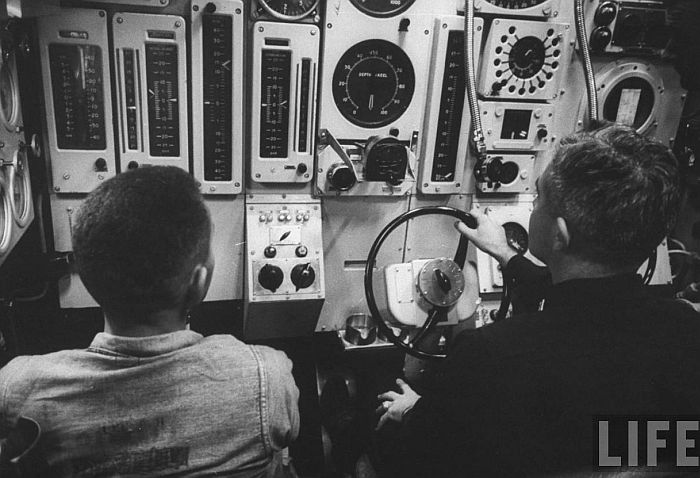
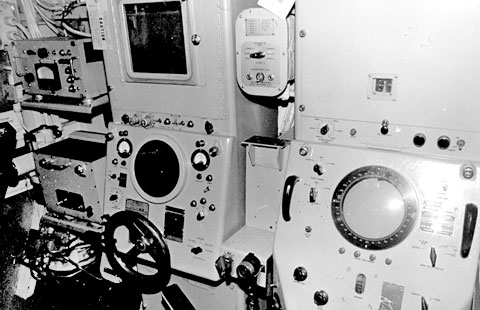
(上與下) 青花魚號採用創新的操縱系統,類似飛機,只要一名人員(右)使用一套帶方向盤的操縱桿,
就可以控制潛艦所有的橫向與縱向舵面。


攝於1957年3月的青花魚號,此時狀態為Phase 2,艦尾的橫向與縱向舵面挪到推進器前方,
成為日後潛艦常見的十字佈局, 而帆罩後方的背舵在此階段暫時被移除。

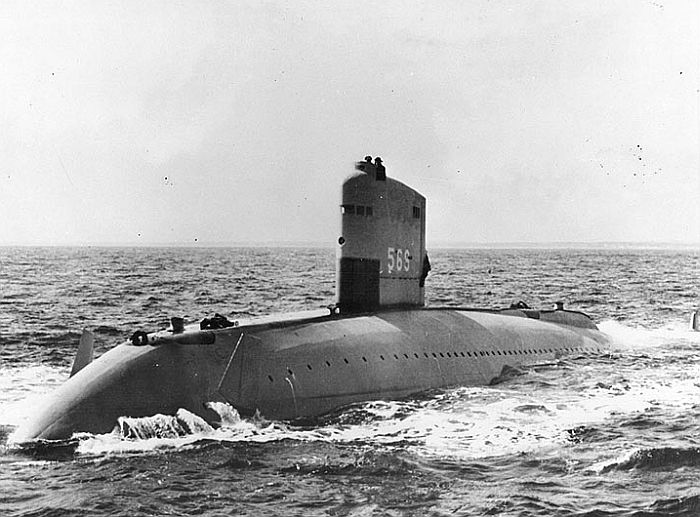
浮航中的青花魚號,應為Phase 2階段的構型,拍攝時間介於1957至1960年間,帆罩後方背舵被取消。

青花魚號在1961年的照片,屬於Phase 3階段,換裝X尾舵進行測試。由於X尾舵是新技術,
為了預防失控,因此這階段青花魚號再度裝回背舵。
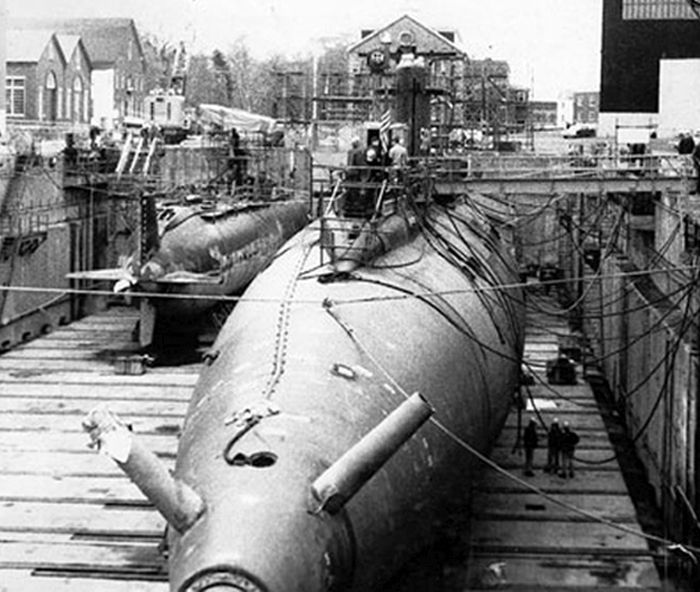
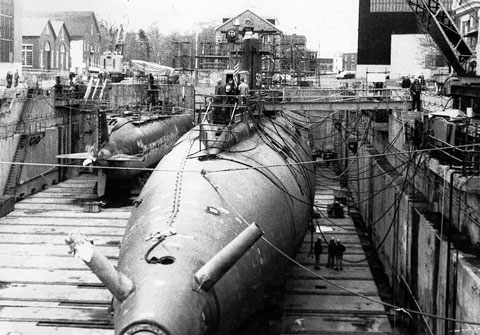
青花魚號在樸次茅茲海軍船塢維修,此時該艦使用X型尾舵。一同在船塢的是核能電力推進的白鮭魚號
(USS Tullibee SSN-597)核動力攻擊潛艦。攝於1965年10月28日。
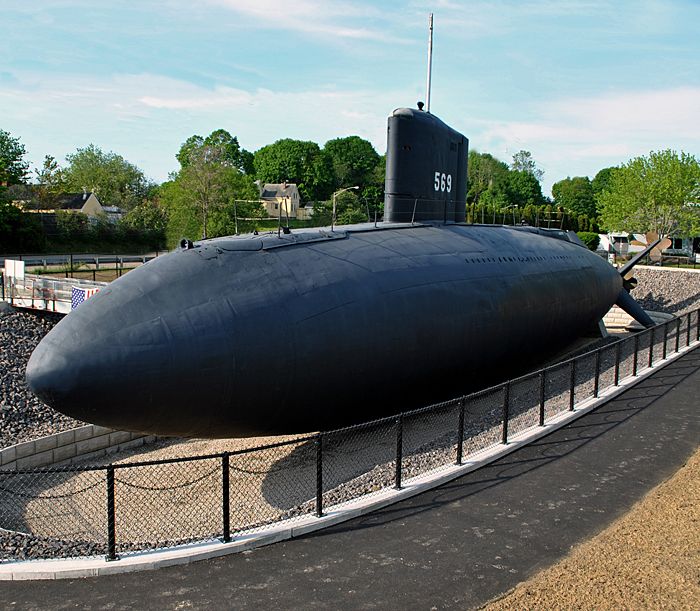
(上與下)青花魚號在1980年除役,1985年轉移到樸次茅茲海事博物館成為紀念艦。
保存時的狀態是青花魚號除役之前的構型,包括X尾舵、同軸反轉螺旋槳,帆罩後方也有背舵。


青花魚號的發動機艙。青花魚號使用非傳統的通用動機16-338柴油機,被暱稱為「鬆餅」(pancake);
由於此種發動機可靠度欠佳,美國海軍只有刺尾魚級柴電潛艦與青花魚號使用,青花魚號之後只能靠著
刺尾魚級改裝時拆除的「鬆餅」發動機作為備料來源,而這些資源耗盡後青花魚號就在1972年除役。
──by captain Picard
| 艦名/使用國 |
青花魚號實驗潛艦/美國
(USS Albacore AGSS-569) |
| 承造國/承造廠 | 美國/Portsmouth Naval Shipyard of Kittery, Maine |
| 尺寸(m) | 長62.1 舷寬8.2 浮航吃水6.7 |
| 排水量(ton) |
浮航1240 潛航1540 |
| 動力系統/軸馬力 |
General Motors 16-338柴油機*2/9600 General Electric推進電動機*2/7500 單軸 |
| 航速(節) |
浮航25 潛航27(早期)/33(1966年構型) |
| 續航力(海里) | |
| 最大潛深(m) | 350 |
| 水面偵測/電子戰系統 |
─ |
| 聲納系統 |
|
| 人員 | 54 |
| 備註 |
1950年11月24日簽約訂購,1952年3月15日安放龍骨,1953年8月1日下水,1953年12月5日服役,1972年12月9日除役,1980年5月1日除籍 ,1985年作為紀念艦展示於樸次茅茲海事博物館 |
|
早在第二次世界大戰末期,無論是納粹德國或英美同盟國雙方,都開始研究諸多嶄新的潛艦技術;其中,主要的研究核心就是研究能讓潛艦長時間在水下持續高速運轉、不需要外來氧氣供應的新發動機,這能讓潛艦徹底擺脫過去潛航時間短、水下航速慢的致命傷;而其他領域還包括降低水下流體阻力與噪音、新的偵測與武器裝備等。戰後美國海軍根據盟軍陣營在戰爭中獲得的經驗與進步,加上許多正在萌芽的新,開始勾勒新一代潛艦的面貌。 二次大戰的經驗顯示,潛艦的存活率與潛航航速、潛航機動性、持續潛航時間、潛航深度等水下性能密切相關。傳統的潛艦構型比較類似水面艦艇,係以水面航行作為最優化 ,例如細長的吃水線部位使水面興波阻力降低,但狹長的船型也使得潛艦表面積大增,在水下航行時阻力較大。由於過去以柴油電力推進的潛艦的潛航時間很短,主要都在水面巡航,只有在發動攻擊或躲避攻擊時才下潛,因此這種設計有其必然性。然而,隨著各種延長潛航時間的新推進系統登場(包括封閉循環發動機以及核子動力等),潛艦轉型成大多數時間都在水下巡航(核能潛艦更僅需要在接收通信或進出港時浮出水面),此時就有必要探討以水下航行為最優化的新設計;即便對傳統柴電潛艦而言,由於呼吸管的逐漸普級,使潛艦能在只露出呼吸管的情況下進行充電,因此也需要轉變成以水下航行優先的船型。 除了降低阻力、提高航速之外,低阻力化的新構型也有助於降低水下航行時的流體噪音,使潛艦更難被察覺。 青花魚號的起源:尋找最佳的潛艦構型 二次大戰結束後,美國海軍國家科學院(National Academy of Sciences)的水下作戰子委員會(Committee on Undersea Warfare,CUW)提議,潛艦設計應該以優化潛航性能為主,而不是水面浮航的性能。在1948年7月,美國海軍研究主管(Chief of Naval Research)要求CUW研究潛航物體的流體特性。在1949年11月,CUW提交「水下作戰委員會潛水物體流體特性過渡性報告」(Interim Report of the Committee on Undersea Warfare Panel on the Hydrodynamics of Submerged Bodies),強烈建議美國海軍設計建造一艘專用的高速研究潛艇來進行各項測試驗證工作,此種潛艇需能在水下以超過20節的速度航行。在1950年1月,這份報告的副本提交到當時美國海軍主管水下作戰的助理部長(Assistant Chief of Naval Operations for Undersea Warfare)Ensign Momsen上將手中,Ensign Momsen上將對此非常重視,希望能藉此研究新一代美國海軍潛艦的構型。當時,美國海軍正進行另一個延長潛艦潛航時間的項目──由核能反應器辦公室主管海曼.李高佛上校(Hyman Rickover)主持的核子推進潛艦,這個項目的原型艦鸚鵡螺號(USS Nautilus SSN-571)仍使用傳統構型的艦體。
在當時,美國海軍以航空母艦為絕對主力,不太可能出資專門建造一艘潛艦來實驗全新構型;然而Ensign Momsen上將也知道出身自航空母艦的美國海軍將領很畏懼潛艦帶來的威脅。因此,Ensign
Momsen上將提交建造新構型原型潛艦的提案時,聲稱主要用途是供美國海軍反潛作戰群進行反潛演練使用。於是,這項提議獲得批准。作為反潛演練的標靶,這艘實驗潛艦不需要裝備武器;而這也使得美國海軍船艦局(Bureau
of Ships,BuShip)能專心設計潛艦,不需要與武器彈藥局(Bureaus of Ordnance,BuOrd))、工程局(Bureaus of
Engineering)、導航局(Bureau of Navigation,BuNav)、建造維修局(Bureau of Construction and
Repair)等單位打交道───Ensign Momsen上將曾說,這些單位介入後,總是會把潛艦塞得像火雞。Ensign Momsen上將指示船艦局,設計原型潛艦時,「忘了水面性能,
美國海軍選擇青花魚號船型時,做了不少船模水槽與風洞測試。這是最後 決定採用的設計,攝於1956年3月1日大衛.泰勒船模中心。 當時美國海軍測試各種概念船型,包括類似飛機或飛船的構型,以取得Momsen上將希望獲得的最佳水下構型。在測試期間,設計單位製造了超過25個比例模型,模型長度從7英尺到25英尺不等。這些潛艦模型在 馬里蘭州的大衛.泰勒船模中心(David Taylor Model Basin, Carderock, Maryland)進行測試,其中兩種表現最佳,一種是單軸設計,另一種則採用雙軸推進;隨後,這兩種船模又到蘭利空軍基地(Langley Air Force Base)進行風洞(wind tunnel)測試,最後單軸設計由於效率較佳而勝出。使用風洞的原因是由於受限於縮尺船模長度及水槽拖車速限,船模在試驗時的雷諾系數(Reynolds number)較實船航行時為小, 影響阻力推估的正確度(即「尺度效應」);因此,青花魚號除在水槽中進行船模試驗外,又特別在航空風洞進行測試,測試時使用特殊黏滯係數的氣體(趨近水的特性),進行減少尺度效應的阻力試驗。 在1950年11月24日 ,美國海軍與緬因州的樸次茅茲海軍船塢(Portsmouth Naval Shipyard of Kittery)簽署新型原型潛艦的建造合約,1952年3月15日安放龍骨,1953年8月1日下水,命名為青花魚號(USS Albacore AGSS-569),1953年12月5日進入美國海軍服役。 革新的船型 如同前述,青花魚號採用嶄新的構型,經過風洞、船模等測試,在均勻的流體(如水下)擁有最佳的低阻效能,能將水下航速提到最高。此種構型宛若一枚砲彈或魚雷,艦首由窄逐漸到寬,在帆罩部位達到最大寬幅,然後到艦尾逐漸往內收縮;這種構型又稱為淚滴型船型(teardrop hull)。相較於經過GUPPY升級的二戰型潛艦(包括改進外型降低阻力),青花魚號的淚滴船型的阻力又再減少40%。青花魚號有著鈍狀前部以及寬廣的中部,前部類似鱈魚頭,尾部類似鯖魚,艇尾設置脊背狀(dorsal-like)的舵面。為了盡量減低阻力,青花魚號不使用傳統形式的指揮塔,而是一種低表面積的流線型構造,稱為帆罩(sail);帆罩前部不再設置水面航行艦橋,內部只容納必要的潛望鏡、天線的伸縮桅杆。以往潛艦都採用雙軸推進,而青花魚號採單軸五葉片螺旋槳推進。 由於擁有大型控制面以及低阻力的流線船體,青花魚號不僅加速快,且艦體對任何控制面反應都相當靈敏 ;這使得青花魚號在面對反潛攻擊時,能更快加速與下潛,擺脫敵方驅逐艦的追擊、逃離反潛武器的殺傷範圍,或者加速下潛到變溫層內。以往二戰型潛艦的最大水下速率約只有15節,而青花魚號能在600英尺的深度輕易加速到27節 以上,在後期更換高功率銀鋅電池後更曾締造33節的潛航速率;曾操作過青花魚號的Bill St. Lawrence表示,操作青花魚號像是「在1000英尺高度駕駛2馬赫的超音速噴射機」。 除了航速快之外,青花魚號的水下加速與轉彎機動性能都遠非二戰型潛艦可比,加速性能甚至比同時期的驅逐艦快一倍以上;青花魚號在水下從2節加速到27節只需要2分40秒,而同時期的驅逐艦則需7分鐘之多。青花魚號能在廣泛的航速下穩定地轉向 ,而狹長的二戰型傳統潛艦在高速轉彎時容易產生縱搖,只能在較低的速率下安全地轉彎;因此,青花魚號能以較快的速率轉向,每秒鐘能轉5度,而經過GUPPY升級的二戰潛艦只能達到每秒3度左右。青花魚號甚至能以艦首微向下的姿態透過推進力來「俯衝」,大幅提高下潛的速度(約每 秒鐘能下潛27英尺),成為真正能在三度空間操作自如的航行器,而傳統船型潛艦由於操控反應不夠靈敏,通常只能靠著水櫃注水後浮力的改變來下潛與上浮(如果艦首向下俯衝可能會失控或來不及配平就衝過壓潰深度),下潛速率自然慢得多。曾在艦上服役的電子技術人員(Electronics Technician)Jim Tyrell表示,他們實際上像是在「飛」青花魚號;多年後他離開海軍並學習駕駛飛機,第一次飛行就有很好的掌握,因為感覺跟操縱青花魚號很類似。 低阻特性不僅提高青花魚號的航速與機動性能,也意味螺旋槳推進器的負荷相對較低,以較低的轉速就能達到額定航速;螺旋槳轉速高到某種程度就會產生空蝕現象並製造巨大噪音,而低阻力的青花魚號發生推進器空蝕的航速提高,意味著水下靜音航速(不產生空蝕)較高。 在青花魚的研究測試之中,水下高速機動時的操控性是關鍵點。如何讓潛艦在水下高速機動時維持安全有效的操控至關重要,如果操控系統反應跟不上機動,潛艦可能快速下潛但來不及拉回而超過壓潰深度,或者高速轉彎時巨大的傾斜會導致艇體滾轉失控翻覆。測試顯示,高速航行時打滿舵,會讓艦尾朝下,同時增加舵面產生的阻力而實現快速減速。而為了防止潛艦在高速轉彎時劇烈傾斜,最初青花魚號在帆罩後方設置額外的背舵(dorsal rudder),不過試航經驗顯示只要配合適當的操控,潛艦在高速轉彎時不靠背舵幫助也能有效控制,因此背舵在Phase 2階段曾被暫時拆除。 青花魚號驗證淚滴型艦殼是極為理想的高速水下構型,從1950年代末期推出的飛魚級(Skipjack class)核能攻擊潛艦開始,核子推進系統與淚滴船型終於合而為一,之後美國所有的作戰潛艦都採用淚滴構型。
在高海況下浮航的青花魚號。雖然淚滴船型水下機動性良好,但水面操作性能欠佳。 雖然淚滴船型擁有極佳的水下表現,但在水面浮航時性能欠佳。首先,淚滴外型的水面航速不如在水下,操控性也較差,在港內迴旋、停泊時需要特別注意;此外,淚滴船型也有著吃水較深的問題。淚滴船型相當複雜 ,整個艦體都是曲面而沒有直線,全艦沒有任何一處的直徑完全相同, 不僅施工複雜成本高昂,不斷變化的直徑也導致內部邊緣產生很多零碎空間而無法有效利用。另外,淚滴船型的外型阻力(Form drag)是最佳化,然而相對於單純的圓柱型構型,淚滴船型的表面積卻比較大,增加了與水流之間的摩擦阻力。 因此,從1950年代末設計建造的白鮭魚號(USS Tullibee SSN-597)和長尾鯊/大鯧鰺級(Permit class)核能攻擊潛艦開始,就把淚滴船型簡化,中部船型採取平直的圓柱形(又稱為平行中部,Parallel Mid Body,PMB),雖然形體阻力稍微增加,但表面積阻力降低後使得整體阻力和純粹淚滴型差異不大,而圓柱形的中部船體也更容易製造。 技術特性 青花魚號浮航排水量1240ton,潛航排水量1540ton。青花魚號是美國海軍首度嘗試以HY-80高張力鋼板製造耐壓殼體,作業潛航深度達180m以上,最大潛航深度350m,動力系統包括兩具通用動機的16汽缸柴油機以及 兩具7500馬力的GE電動機,浮航速率12節,早期最大潛航速率超過25節(1966年的Phase 4階段締造33節速率的紀錄),艦上編制54名乘員。由於青花魚號屬於純粹的實驗艦艇,因此沒有任何作戰裝備,編屬於美國輔助艦單位。 配合航速高、反應敏捷的船型,青花魚號也採用全新的操縱系統,更類似飛機的系統。艦上所有控制舵面(含首水平舵、後水平舵以及垂直舵) 集中在一套操縱桿上操作,只要一人就可同時控制水平與垂直向舵面,操縱桿構型類似飛機的方向盤。許多在以往潛艦上需要多人分別控制的功能,在青花魚號上被整合到只需少量人員控制。因此,以往潛艦需要10名人員才能控制航行(包括下潛、上浮與操舵),青花魚號只需要三人就可做到──航行指揮官(Conning Officer)、駕駛員(pilot )以及一名負責控制水櫃/閥門/舵面配平的人員。
(上與下) 青花魚號的操縱桿(右)類似飛機的方向盤,一套操縱桿就能控制橫向與縱向舵面。
青花魚號的綜合儀器設備面板。 液壓控制方面,青花魚號使用3000psi高壓液壓系統,控制所有舵面動作以及升降潛望鏡和伸縮桅杆等;美國海軍在先前刺尾魚級(Tang
class)攻擊潛艦上首度啟用3000psi液壓系統,但當時許多設計還不完善,因而發生不少問題;而到青花魚號時,3000psi液壓系統已經經過改善,解決了許多問題。
青花魚號的潛望鏡,將搜索與攻擊潛望鏡整合在單一的伸縮桅杆內。攝於1955年10月27日。 青花魚號安裝了一種嶄新的自動駕駛輔助系統,參考了軟式飛船的控制系統。這套自動駕駛系統能消除人為因素(協調不良、反應過慢、壓力、疲勞、分心、無聊等)造成的失誤;此外,在自動駕駛模式下,可以將舵面動作降至最低,使潛艦更安靜地航行。
青花魚號的聲納控制席。 青花魚號也被用來測試新的聲納技術,例如首度安裝玻璃纖維(fiber-glass)製造的聲納外罩,這在日後成為美國海軍潛艦的標準配備。在1962年,青花魚號安裝新開發的BQS數位多波束控制(Digital MUltibeam Steering,DIMUS)聲納系統的初期工程原型, DIMUS是之後美國潛艦聲納系統的技術基礎;此外,也加裝BQR拖曳陣列聲納的原型,這是拖曳陣列聲納首次裝備在潛艦上的紀錄。
青花魚號的低階官兵臥舖。
青花魚號的船員大艙,是低階官兵的主要活動空間。 作為一艘科研實驗用潛艦,青花魚號的起居空間比十分侷促。艦上的床位剛好只夠編制內的船員,然而實際上每次任務都會有負責科研測試項目的額外人員登艦。科研測試所需的相關裝備通常安裝在前部船艙,而所有人員只能照班次輪流睡有限的床位,成為「熱舖」(hot bunk)。青花魚號的官廳(Officers Wardroom)設置在電池艙前方,是軍官用餐、會議、工作、研究的地方,必要時還用來容納額外的舖位。而低階人員只能在電池艙後方的船員大艙(Crews Mess)進行休閒等活動,設有三組六人座餐桌,可做為餐廳、教室、船員自習區域、播放電影或進行其他活動。
青花魚號的「鬆餅」發動機,結構與傳統柴油機十分不同,結構緊湊且轉速高,但故障頻仍。 青花魚號使用通用動機(General Motors)16-338柴油機,美國海軍暱稱為「鬆餅」(pancake)。此種發動機採用非傳統的緊致設計,採用垂直傳動軸,汽缸照航空發動機的輻射方式排列,轉速是傳統柴油機的兩倍,並以鋁合金製造來減輕重量。此種發動機先前首度用於刺尾魚級(Tang class)柴電攻擊潛艦,原本希望在更小的體積與重量之下產生足夠功率,但實際經驗顯示此種發動機非常容易故障,為電池充電時也無法產生足夠功率。最後,「鬆餅」發動機被美國海軍棄用,四艘刺尾魚級從1956年起陸續改裝傳統式柴油發動機,為此還加長了艦體。而青花魚號艦體外型無法改變,輪機艙空間無法擴大,只能繼續使用「鬆餅」發動機;於是,青花魚號只能倚賴四艘刺尾魚級改裝時拆除的16具「鬆餅」發動機的零件維持運作,等這些零件資源耗盡後,青花魚號只能除役。
服役期間的構型變更 在青花魚號服役生涯中,前後歷經了多次改裝來測試不同的操控、推進等技術,總共有五種構型(Phase 1~5)。
青花魚號服役生涯中多次變更構型,主要是更換操控面以及推進器。 1.Phase 1(1953/12~1955/12)
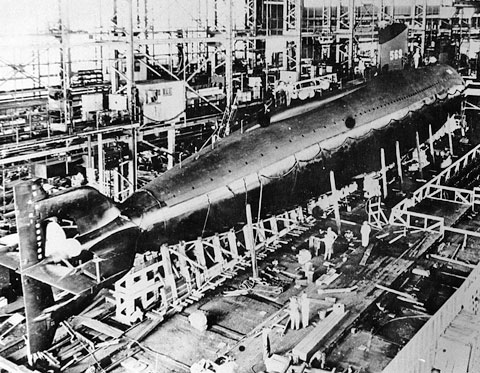
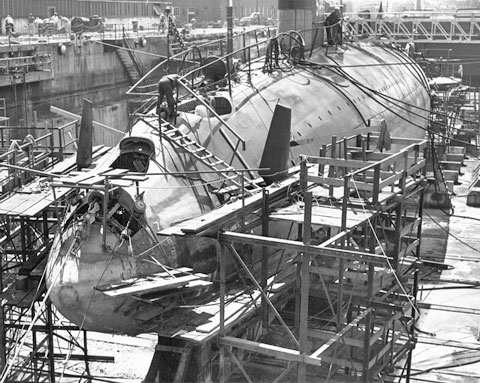
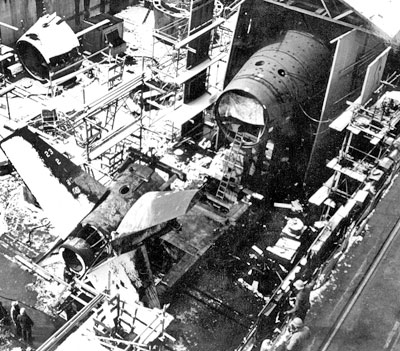
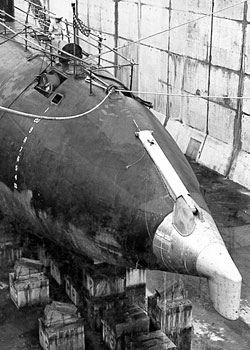
建造中的青花魚號。一開始,青花魚號的尾部控制舵面設置在 螺旋槳推進器後方,由一組艦尾支架結構之稱。 這是服役初期的構型,採用單軸五葉片螺旋槳,槳面直徑11英尺(3.353m)。為了盡可能提高控制力,青花魚號完工之初使用大面積的尾舵組(包括橫向與縱向),並設置在螺旋槳推進器後方;為此,艦尾設置一組支撐結構來安裝尾舵,包圍著螺旋槳。由於舵面設置在螺旋槳後方,螺旋槳產生的推進水流會經過舵面,提高了舵效應,即便潛艦在水下低速航行(此時舵效應較低),也能提供很好的操縱性;然而在高速航行時,舵面控制力道過剩,且舵面與支撐結構承受過大水壓,因此高速狀態下 的操控穩定性不佳。當然,由於推進器的水流通過舵面,自然會產生較大的紊流與噪音。鑑於高速航行時青花魚號的操控力道過強,美國海軍在船舵控制面邊緣安裝與飛機上類似的配平片(trim tabs),經過適當的調整後,高速航行時只要使用小舵面就可以有效控制,盡量減少使用大舵面。 此外,艦首設有一對小型水平舵面,緊鄰帆罩後方設有一個「背舵」(dorsal' rudder),這是怕青花魚號在高速航行時控制力不足而設置的額外舵面。
青花魚號帆罩後方設置一個「背舵」。 在Phase 1的構型下,青花魚號締造了潛艦的新水下航速記錄(約26、27節);這個階段測試還包括將青花魚號螺旋槳拆除、在水下被拖曳時的特性,以試驗這種船型有裝螺旋槳或沒有裝螺旋槳的性能表現,這個測試在美國海軍潛艦史上也締造先例。 青花魚號從1954年4月8日展開第一階段測試,部署於新倫敦市的康乃迪克(New London, Connecticut)潛艦基地,並在美國南部佛羅里達到古巴之間的海域進行初期的測試,測試期間發現一些問題,在7月3日返回樸次茅茲船廠,隨後花費約一年的時間,在大衛.泰勒船模中心的協助下進行修改,並解決一些機械上的問題。 在1955年10月12日,青花魚號離開樸次茅茲再度展開試航,隨後前往佛羅里達海域,擔任美國反潛作戰發展中心(Operational Development Force's Surface Antisubmarine Development Detachment)反潛作戰測試的假想敵。在1955年11月4日,美國海軍作戰執行長(Chief of Naval Operations)亞里.伯克中將(Admiral Arleigh Burke)登艦,觀摩該艦的航行性能展示。 Phase 2(1956/3~1960/11):
青花魚號服役初期裝有艦首水平舵,後來因為產生較大的阻力與噪音而被拆除。
攝於1960年8月3日的青花魚號,此時艦首的水平舵已經拆除。 1955年在11月24日,青花魚號進行高速測試,完成後返回樸次茅茲,從1955年12月到1956年3月進行改裝完成,這就是青花魚號的Phase 2階段。 在這次改裝中,青花魚號拆除了帆罩後方的背舵,並更換艦尾的控制舵面;新的水平與垂直舵面直接安裝在艦尾、螺旋槳之前的部位,呈十字形,而原本包圍螺旋槳的舵面支撐結構就取消了。由於螺旋槳水流不會流經舵面, Phase 2 的舵面構型承受的壓力大幅降低,在高速航行下的操控性提高,流體噪音也降低些,當然在低速航行時的操控性相對犧牲。青花魚號在Phase 2使用的十字形尾舵構型,被日後美國海軍潛艦沿用數十年。 在1959年,青花魚號換上一個新設計的五葉片螺旋槳推進器,槳面直徑提高到14英尺(4.267m),然後在5月啟航前往美國南部海域,擔任反潛作戰發展中心工作的假想敵。在Phase 2階段,螺旋槳四周不再有舵面支撐結構,使槳面可以擴大;而擴大的槳面也能提高推進效率,讓潛艦在相對較低的轉速下提供相同的推進力道,可減低螺旋槳聲噪。為了降低流體聲噪與阻力,青花魚號在這個階段也將艦首兩個小型水平舵面拆除。隨後在1959年剩餘的時間到1960年下旬,青花魚號都在測試大衛.泰勒船舶中心的一系列新裝備,其中最主要的是測試一個新的凹面艦首聲納音鼓(concave bow sonar dome)。 在1956年11月,青花魚號回到船廠進行改裝,隨後在1957年3月11日在美國南部聖胡安(San Juan)海域、關達納摩灣(Guantánamo Bay)等地展開新一輪測試,接著在1957年4月2日抵達美國東北部波士頓與樸次茅茲進行作業,並在1958年初返回樸次茅茲船廠進行整修。在這一次維修與改裝中,青花魚號加裝若干能對輪機設備進行隔音減振的措施,包括在潛艦上層結構與壓載艙內部加裝一種名為Aqua-Plas的隔音橡膠。 在1958年10月,青花魚號的艦首經過進一步修改來降低噪音。青花魚號在1958年年底完成改裝,然後前往哈利法克斯海域參與加拿大海軍船艦的反潛訓練。 Phase3(1961/8~1962/12):
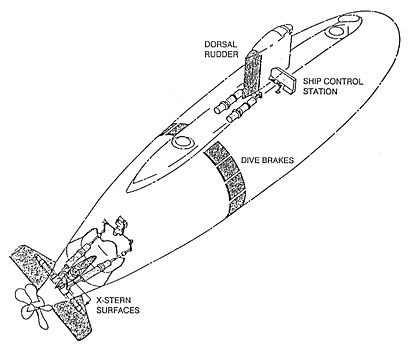
青花魚號在Phase 3的控制構型,包括X型尾舵、在艦體中後部安裝10個潛航煞車(Dive Brakes); 而在Phase 2階段曾拆除的背舵又被裝回。 在1960年11月21日,青花魚號在樸次茅茲船廠進行改裝, 最重要的項目是將原本的十字尾舵換成X構型尾舵。相對於先前十字舵面,X尾舵能提供更大的表面積,而且無論在橫向與縱向動作時四個舵面都會參與,因而增加了操控性。由於X尾舵是種全新的嘗試,高速航行時失控的顧慮較大,因此這次改裝也包括一些安全措施,首先帆罩後方重新裝回背舵,以防潛艦高速轉彎時翻滾失控;此外,青花魚號也更換新的艦首段, 並在艦體中間約2/3處安裝10個減速煞車(Speed brakes)或稱潛航煞車(Dive Brakes),沿著艦體圓週排列,類似飛機的氣動煞車,主要是防止高速下潛時失控,可加快潛艦減速、避免衝過壓潰深度。然而,在實際航行中,這些減速煞車有時會因與周遭海水流體摩擦而意外張開。所有改裝在1961年8月完成,該艦隨即啟航,在美國東岸海域進行各項測試。 X型尾舵
青花魚號在Phase 3階段裝的潛航煞車,類似飛機的氣動煞車。 傳統的十字尾舵在控制方向,橫向與縱向分別只有一對舵面參與;而X尾舵的四個舵面都會參與橫向與縱向控制,有效舵面積提高。因此,X型尾舵能以較小的總面積,獲得與十字尾翼相同的 等效舵面積,提高了靈活度並降低控制面的單位面積負荷 。這種特性可提高航行安全,傳統十字舵是一對水平舵面加上一對垂直舵面,任一對舵面卡死或失效,在這個軸向就失去控制能力,這對於正在水下航行的潛艦而言非常危險(例如翻滾失控或一路俯衝超過耐壓深度);而X舵面任何一個舵面對水平與垂直方向都有效,理論上就算三個舵面失效,僅存的一個舵面都還有三度空間(水平向與垂直向)的控制能力,讓潛艦繼續操作。 另外,在相同的正面截面積之下,X尾舵(斜向佈局)的長度比十字舵(水平/垂直向)更大;在不超過潛艦輪廓的橫斷面 的條件下,X舵已經可以提供足夠的控制面積,在坐底或靠泊時比較不容易碰撞。而傳統十字型尾舵為了獲得足夠的舵翼面積來提高操控性能,尾舵翼展自然就會超過潛艇的高度與寬度,潛艦坐底時下方垂直尾舵就很容易壓壞,能座底的地形大受限制 。 流體噪音方面,X型尾翼可以在設計時與螺旋槳協調,使X型尾舵通過水流時扭合出一道預旋(preswirl)水流進入螺旋槳 ,這個優化的流場有助於降低螺旋槳的空蝕噪音,改善推進效率 ;此外,十字舵的上垂直舵處在帆罩形成的水流氣泡中,不僅影響舵面效率也增加流體噪音,而X舵就能完全避開帆罩造成的水流。 再者,X尾舵先天上比較能抵抗潛艦艦體的滾轉(rolling,推進器旋轉時也在艦體施加扭力,往反方向滾轉)。改用X尾舵之後,青花魚號的操控反應進一步加快,高速完成360度轉彎的直徑從原本的300碼(274.32m)大幅減至100碼(91.44m),而當時驅逐艦轉彎直徑則高達1100碼(1005.84m)。 雖然有以上優點,X型尾舵動作遠比傳統十字形尾舵複雜(每個翼面都兼具水平與垂直操縱的功能,而且四個舵面都獨立驅動),一定需要計算機以及動力機械才能控制,由計算機計算每個舵面的角度,並自動指揮伺服機構帶動舵面;一旦發生故障如失去電力、失去液壓、控制電腦故障等,若無法快速排除,則很可能使潛艦迅速地失控例如快速滾動(snap rolling),產生致命危險。這使得美軍在很長一段時間內對X型舵缺乏信心;長久以來,美國海軍潛艦向來由兩名人員操舵,分別控制水平舵與垂直舵的角度。為了保障可靠度,X舵面配套設計必須包括完善的冗餘設置以及備援機制,這些都導致X型尾舵的控制機構複雜化,不僅成本增加,且潛艦艦尾必須加粗才能容納,多少會降低潛艦造型流線化的程度。在1960年代,瑞典首先在實戰型柴電潛艦上採用X型尾翼(從海蛇級(Sjoeormen class)開始),德國、荷蘭、澳洲也在1980年代紛紛在設計中的新潛艦上納入X尾翼;而美國直到2010年代設計替換俄亥俄級(Ohio class)的新一代核能彈道飛彈潛艦,才首度應用X尾翼。 在安裝流體煞車之前,美國海軍曾在青花魚號上測試減速傘,利用從附近空軍基地借來的B-47轟炸機的減速傘,安裝在帆罩頂端裡;美國海軍希望減速傘不僅讓艦體減速,同時能拉高艦首角度,避免潛艦以俯角向深海衝去。然而這項測試並不成功,第三、第四次測試時,降落傘直接被扯斷,這顯示要用減速傘讓超過1800噸的潛艦減速並不實際。
在Phase3階段改中,也包括換裝新的無線電通信設備。先前青花魚號的無線電設備是美國海軍剩餘物資拼湊出來,曾被稱為「整個美國海軍最爛的無線電」。有一次青花魚號完成任務返航通過麻州附近鱈魚角運河(Cape
Cod Canal)時,指揮官無法聯繫基地,不得不給引水員一塊錢,請他打電話給基地告知青花魚號一切平安。 在1962年12月7日,青花魚號開始服役生涯的第四次大規模翻修改裝,此階段是Phase 4。在改裝之中,,青花魚號的艦體後段機艙部位被切開,換上一個新的後段船體,裡面裝有包括第二組推進電機等新設備;這主要是用來支持這一輪改裝的重點測試項目── 同軸反轉螺旋槳,包括一個直徑10英尺(3.048m)的七葉片螺旋槳,以及一個直徑8英尺(2.438m)的六葉片螺旋槳,兩個螺旋槳分別由兩部推進電機分別驅動。除了新推進器之外,原本的鉛酸蓄電池被高容量銀鋅(silver-zinc)電池取代,並加裝一組全新的半自動推進系統控制機櫃。 此次改裝的其他項目包括安裝新的無線電設備、數位多波束控制(Digital MUltibeam Steering,DIMUS)聲納系統工程原型(BQS)以及測試用的拖曳陣列聲納原型(BQR)等,這是美國海軍首次在潛艦上裝置拖曳陣列聲納。
在Phase4階段的改裝中,青花魚號更換艦體後段,加裝同軸反轉螺旋槳以及第二套推進電機。 另外,此次改裝也增加一些新的潛艦安全技術,這些是基於1963年4月長尾鯊號(USS Thresher SSN-593)核能攻擊潛艦失事意外的教訓而產生,包括一個新的主水櫃高壓快速吹除系統以及一套緊急回復系統(emergency recovery system)。長尾鯊號失事促使美國海軍重新審視現有的壓艙吹除系統,並認為無論筏門與管道都必須加大,在緊急時能瞬間將最大量的氣流灌入壓載艙,以更大的速度排出壓艙水,使潛艦在危急狀況下也能迅速上浮、脫離險境。而為了提高航行安全,此次改裝中,艦尾舵面增加了一個游標尺(vernier)以及一個舵面控制系統;當潛艦航速超過預設值(通常是20節),這套控制系統就自動啟動,抑制操縱席傳給舵面的信號強度,目的是使潛艦在高速航行時降低操縱面的控制幅度,避免發生過度控制而導致危險。此外,艦尾也增設一套獨立的備份液壓控制系統,萬一主要液壓控制系統受損時,操縱席仍有辦法控制尾部舵面;切換到這套備用液壓系統的開關設置在駕駛席頂部,被稱為膽小鬼開關(chicken switch)。
在岸邊的青花魚號正已壓縮空氣在吹除水櫃。
青花魚號測試壓載水櫃吹除系統緊急上浮的畫面。 所有改裝工作在1965年3月完成,隨後青花魚號前往佛羅里達海域進行測試;在這個階段中,青花魚號締造了33節的柴電潛艦潛航世界紀錄(主要歸功於銀鋅電池),至今仍無人能破。 同軸反轉螺旋槳的測試中,兩個螺旋槳的間距設定是測試重點。第一輪測試設定的間距為10英尺;第一輪測試完成後,原本要繼續測試7.5英尺(2.286m)的間距設定,但根據先前測試結果,直接跳到5英尺(1.524m);5英尺是工程師事先估計的最佳設定,之後實際測試也獲得證實。之後,美國海軍又在大鯧鯵級(Permit calss)核能攻擊潛艦魔鬼魚號(USS Jack SSN-605)測試同軸反轉螺旋槳,不過之後美國海軍就再也沒有測試這種推進器。 在1965年10月8日,青花魚號返回樸次茅茲,隨後繼續進行試航作業。在1966年8月1日,青花魚號進入樸次茅茲海軍船廠進行改裝,移動銀-鋅電池的位置,並將同軸反轉螺旋槳兩個葉片之間的距離縮短為5英尺,所有改裝作業在1967年8月完成。青花魚號在1967年9月再度展開試航,然後在10月與11月佛羅里達外海測試新開發的拖曳陣列聲納,接著又到巴哈馬島附近進行聲學測試。 在1968年1月1日到4月19日,青花魚號在樸次茅茲船廠進行改裝,進一步修改推進系統以及新裝備,隨後在緬因海域南部測試新裝的MONOB I、AUTEC以及周邊飛行體(Fly-Around-Body,FAB) Phase I等新裝備。
安裝在青花魚號艦首的FAB系統。 FAB主要是為了讓潛艦能在部署的母港附近進行噪音測量工作;新造或剛完成翻修程序的潛艦都必須進行試航,並在試航期間測量潛艦輻射的噪音是否符合標準。以往這項程序都必須在特殊的測試場域、由專門的單位進行,而這些場域通常遠離船廠與潛艦的母港。因此,美國海軍發展FAB,希望能讓潛艦的噪音測量程序更為方便。FAB是一種從潛艦艦首施放的拖曳聽音陣列,陣列前端是一個可控制的拖曳體;FAB部署在潛艦附近,利用聽音陣列測量潛艦發出的聲噪。不過,實際測試的結果顯示,只有在極度平靜的水域(在2級海象以內)才能有效部署使用FAB,實用性不高。 青花魚號在1969年8月24日返回樸次茅茲船廠,拆除AUTEC,又加裝新的FAB Phase II裝備進行測試。1968年9月30日,青花魚號返回樸次茅茲軍港;此時,她並不是緊鑼密鼓地安裝下一階段的測試裝備,而是等待美國海軍對相關研究的決定。 Phase 5(1971/4~1972): 在1970年2月2日,青花魚號在乾塢展開翻修改裝,準備執行由美國海軍船艦研究發展中心(Naval Ship Research and Development Center at Carderock, Maryland)主導的超越計畫(Project Surpass,SURPASS)。青花魚號在1971年4月16日啟航離開乾塢;在同年10月,青花魚號在麻州外海展開SURPASS的測試工作,包括聲納與雷達等裝備的測試。
SURPASS計畫一大重點是尋找減低艦體與海水流體摩擦的方法,使航速增加、噪音降低;因此,青花魚號加裝一套邊界層(boundary-layer)控制系統,在航行時施放一種黏性聚合物液體(viscous
polymer liquid),在船體周邊形成一層塗層,可降低船體通過海水的阻力;而當時青花魚號的船員稱這種方法為潤滑水(Slippery
Water)。在測試初期,使用黏性聚合物液體的表現十分理想;然而隨後青花魚號的柴油主機卻頻頻故障,無法完成原訂測試工作,該艦支援SURPASS的任務被取消,隨後SURPASS計畫也遭到取消。此時,青花魚號使用的
「鬆餅」 發動機的剩餘零件資源已經耗盡,隨即展開除役程序。青花魚號在1972年12月0日正式除役,隨後放置在賓系法尼亞州的費城,而青花魚號在美國海軍的船籍則在1980年5月1日註銷,青花魚號隨即在1984年4月被拖到樸次茅茲。 服役生涯 在1950年代的反潛演習中,青花魚號以及美國第一艘核子潛艦鸚鵡螺號(USS Nautilus SSN-571)展現的高速能力,讓當時美國海軍驅逐艦等反潛單位吃足苦頭(仍使用二次大戰時代的反潛探測與武器技術)。當時美國驅逐艦的聲納探測距離不超過5000碼,搭配刺蝟砲、Alfa等無導引直線拋射式反潛武器,從聲納標定潛艦之後到發射武器、落水、抵達引爆深度,高速潛艦已經移動一段距離而逃出武器殺傷界。 即便青花魚號只使用柴電推進系統,它在水下仍能在短時間衝刺中達到27節高速。此外,青花魚號的水下機動能力也大大超過傳統潛艦,包括在水下進行急轉彎以及大角度快速下潛,就如同噴射機在空中飛行一樣。作為海軍反潛演練的目標,青花魚號經常比追逐它的船艦跑得更快、轉彎得更靈活。有一次美國海軍驅逐艦薩斯菲德號( USS Sarsfield DD-837)與青花魚號實驗潛艦進行反潛對抗演習時,薩斯菲德號對青花魚號的31次攻擊只有一次判定成功。這些測試結果也刺激新一代反潛技術的普及,包括探測距離更遠的大型低頻陣列聲納、以導向魚雷或核子深水炸彈為戰鬥部的火箭助推反潛武器(如ASROC)等,希望將反潛探測距離提高到20000碼,反潛接戰距離提高到至少10000碼。
擔任海軍反潛作戰標靶勤務時,青花魚號被漆成橘色。 美國潛艦部隊的伙食堪稱海軍之最。以青花魚號為例,艦上廚房必須供應55名艦上編制人員與其他短期乘客/科研測試人員的餐飲,包括肉捲、麵包、派、蛋糕、小麵包等等。除了例行的三餐(早餐、午餐、晚餐)之外,下午以及晚上接近午夜換班時(23時15分)各供應一次熱湯與三明治,分別稱為「soup down」與「mid rats」。當潛艦週五中午停在樸次茅茲 (Portsmouth)基地時,廚房還供應特別餐點。曾在青花魚號服役的食勤士官(Commissaryman,CS)Henry "Shakey" Graves表示,當時青花魚號的伙食在潛艦部隊中名聲良好,在每週五中午在樸次茅茲基地的的特別供餐菜單是新鮮主龍蝦或龍蝦堡(隔週輪流);在供應龍蝦堡的週五,Henry Graves會特別問青花魚號指揮官是否要使用秘密配方── 一瓶雪利酒(sherry ),雖然美國海軍艦上明文規定禁酒,照規定艦上應該只有工業用酒精。而青花魚號新艦長到任交接時,前任艦長會告訴新艦長,不要問龍蝦堡中那個美味無比的配方是什麼。
停在乾塢的青花魚號。淚滴型艦型表面有弧度,使得艦面上走道狹窄;為了降低危險性, 乾塢作業時,上部會架設木製欄杆。
每當青花魚號進入乾塢維修或改裝時,由於艦體表面圓滑、可用的走道空間狹小,對於施工以及站哨警戒人員造成很大的潛在危險,一不小心就可能摔落下方35至40英尺的塢底。為了降低危險性,船廠工作人員會在青花魚號上部架設木製欄杆。
在青花魚號的服役生涯中,難免遇到一些驚險狀況。曾在青花魚號服役的聲納手Ashley
Fletcher表示,有一次青花魚號剛出塢進行第一次下潛測試,可能由於配平的計算失誤,艦首像石頭一樣下墜。當時在值班的Fletcher正盯著前方聲納顯示器,突然艦體向前大幅傾斜,變成臉面朝下,隨後艦體姿態劇烈晃動彈跳了好幾次。艦上電源切斷,一片漆黑,直到艦長下令啟動緊急燈光,並下令吹除前部水櫃以及全速倒俥。幸好當時潛艦深度只有到300英尺左右,所以青花魚號控制住了艦體,隨後浮出水面。 每艘潛艦隔一段時間就要進行一次最大操作深度潛航測試,稱為「深度測試」(test depth),確保艦體結構的水密性以及所有系統在這個深度下仍能正常工作。而在這種測試場合,艦上所有人員都會派去密切監視各部位情況。曾在青花魚號服役的Jack Hunter上尉表示,在一次深度測試中,當青花魚號在大深度進行迴旋機動時,他聽到一陣爆裂聲,推進機櫃冒出濃煙。艦上機電人員Tony Szymbor立刻切斷主推進電機的電源,然後宣布機櫃起火(Fire in the cubicle)。當機櫃的電源移除後,濃煙停止了,Tony Szymbor隨即宣布火已熄滅(Fire is out)。然而,當Tony Szymbor試圖重新啟動推進馬達,沒有任何回應,Tony Szymbor隨即通知控制室無法回應俥令,機櫃失火顯然已經造成主推進電機失效。此時青花魚號在最大操作深度,沒有任何推進動力能讓潛艦上浮;隨後,控制室人員啟動水櫃緊急吹除系統,排出壓載水櫃,於是青花魚號就浮上水面。 如同前述,長尾鯊號失事後,美國海軍發展出新的高效能水櫃吹除系統,青花魚號是第一艘安裝並測試這種系統的潛艦,安裝後隨即進行一系列測試。曾在青花魚號服役的航行官(Quartermaster )Norm Bower回憶,在第一次測試時,青花魚號下潛到100英尺深度(30.48m),吹除水櫃之後潛艦迅速浮出水面。第二次測試時,青花魚號原訂下潛到500英尺(152.4m),但艦長決定先在300英尺(91.4m)進行一次測試;開始吹儲水櫃後,艦體立刻朝右舷大幅傾斜(54度),並維持這樣的姿態直到浮出水面;稍後艦上工程人員判斷,潛艦帆罩在上浮時就像個額外的巨大舵面影響姿態,而當青花魚號是在靜止狀態上浮,潛艦沒有向前的動量,帆罩帶來的影響遂導致艦體傾斜。因此接下來進行500英尺深度上浮測試時,青花魚號保持前進,果然順利上浮,並沒有發生任何問題。 除役後的保存
(上與下) 除役後停放在樸次茅茲海事博物館的青花魚號。
青花魚號在1972年除役後移到費城的停役船艦設施(Inactive Ship Facility at
Philadelphia),一直停放到1984年。在1984年,青花魚號被拖到新漢普夏州(New
Hampshire)的樸次茅茲(Portsmouth),1985年移到樸次茅茲港海事博物館(Port of Portsmouth Maritime
Museum)旁,成為青花魚公園(Albacore
Park)的主題展品,以紀念青花魚號服役20年來為美國海軍各項流體力學、高速航行、操控、減音降噪、聲納偵測、安全逃生等嶄新技術領域的卓越貢獻。在1989年4月11日,青花魚號被選入美國國家歷史古蹟(National
Register of Historic Places)。在1989年,青花魚號被指定為國家歷史地標(National Historic
Landmark),這是由於青花魚號深深影響之後美國海軍潛艦的發展。在2000年,青花魚號
|