
海狼級核子動力攻擊潛艦(2)
(上與下三張)海狼號進行第二次試航(Bravo)的照片,攝於1996年9月16日。




海狼號於1997年7月19日在通用電船舉行成軍典禮的照片。背後船台上可以看到建造中的第二艘海狼級
康迺迪克號(USS Connecticut SSN-22)


海狼號的艦首球型聲納陣列:上方的大型圓球是直徑24英(7.315m)的被動聲納陣列,下方連接在一起碗型陣列的是
主動陣列聲納。球型被動陣列聲納外部則架設了低頻被動聲納的陣列(三層)。

海狼號的航行控制室,前方兩名人員控制潛艦航行,分別控制水平與垂直方向的舵面。攝於1997年7月19日

海狼號的航行控制室

海狼號(USS Sea Wolf SSN-21)浮航的雄姿。

由艦尾看海狼號。以上兩圖均攝於2009年11月NNUALEX 21美日海上聯合演習。

浮航中的海狼級核能攻擊潛艦康乃狄克號(USS Connecticut SSN-22)

正在進港的康乃狄克號

(上與下)海狼號前部近照。


在2015年8月15日,海狼號結束一趟六個月的部署,返回華盛頓州布雷默頓的基察普海軍基地(Kitsap, Bremerton)的照片

(上與下)下水前夕的海狼級三號艦吉米卡特號(USS Jimmy Carter SSN-23),艦體增加一段長30公尺的
多任務平台(MMP),可用來收放潛水人員、水下載具、探測器等。吉米卡特號擔負許多機密的特殊情報蒐集任務。


浮航中的吉米卡特號。
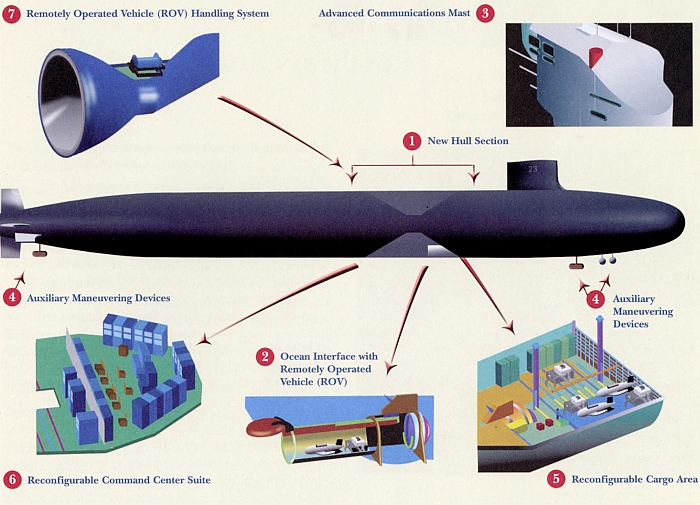
吉米卡特號中部增加的「蜂腰」結構示意圖。「蜂腰」結構下部的加減壓住水艙區用來收放ROV。
蜂腰艙區前部用來停放各種籌載,「蜂腰」後部設置指揮管制中心。

(上與下)在2021年12月15日,兩個月前在南中國海發生碰撞的康乃狄克號從聖地牙哥啟航,
前往布雷默頓的普吉灣海軍船廠進行整修。10月2日康乃狄克號發生碰撞後,先返回關島進行
應急整修,包括拆除受損的艦首聲納罩,然後航行回美國西岸。


2023年7月8日,康乃狄克號進入普吉灣海軍造船廠第5號乾塢展開維修工程,包括修復2021年10月
撞擊事故中受損的艦首(含聲納罩)以及艦尾舵。
──by captain Picard
| 艦名/使用國 | 海狼級核子動力攻擊潛艦/美國
(Sea Wolf class) |
||||
| 承造國/承造廠 | 美國/Electric Boat division of General Dynamics Corporation in Groton, Connecticut | ||||
| 尺寸(m) | 長107.6(SSN-21、22)/137.6(SSN-23) 直徑12.2 浮航吃水10.7 | ||||
| 排水量(ton) | SSN-21、22:浮航7568
潛航9142
SSN-23:潛航12139 |
||||
| 動力系統/軸馬力 | S6W反應爐*1/52000~58000 蒸汽渦輪*1 泵噴推進器*1 備用柴電推進系統 (Fairbanks Morse柴油機 + 西屋電動機) 低速輔助推進器*1(SSN-23) |
||||
| 航速(節) |
官方數字:潛航25以上,浮航18以上 實際:潛航35以上(SSN-21、22)/30(SSN-23),靜音潛航速率約20 |
||||
| 最大 安全潛深(m) |
官方數字:約244 實際:約475至610左右 |
||||
| 水面偵測/電子戰系統 |
AN/BPS-16 I頻平面搜索雷達*1 AN/SPS-25A雷達*1 GTE WLQ-4(V)1電子反制系統*1 AN/WSN-3A電子支援系統*1 Type-8J Mod3搜索潛望鏡*1 Type-18H Mod1攻擊潛望鏡*1(未來將加裝RemoteReality光電偵測套件) |
||||
| 水下偵測/反制系統 | AN/BQQ-5D/E聲納系統*1 (包含艦首大型球形主/被動陣列聲納、AN/BQG-5側面低頻寬孔徑被動陣列聲納(WAA)、TB-16與TB-23(爾後被TB-29A取代
)被動式拖曳陣列聲納各*1等。日後升級為AN/BQQ-10 ARC-I) BQS-24近距離高頻主動聲納*1 AN/WLY-1水下警告/反制系統 AN/BLQ-10電子支援裝置(改良時加裝) |
||||
| 射控/作戰系統 | AN/BSY-2作水下戰系統(初始裝備 ) Raytheon CSS MK-2作戰控制系統 AN/BGY-1作水作戰系統(改良時取代BSY-2) |
||||
| 人員 |
SSN-21、22:123 SSN-23:141 |
||||
| 艦載武裝 | 艦側MK-69
26吋(660mm)魚雷管*8
線導魚雷或飛彈50枚(彈艙籌載量)+管內8枚 (可 使用MK-48ADCAP線導魚雷、魚叉反艦飛彈、戰斧巡航飛彈、水雷、先進自動機雷(Advanced Mobile Mine ,AMM)等) MK-2 3吋誘餌發射器*2 |
||||
| 姊妹艦 | 共三艘 | ||||
| 艦名 | 簽約時間 | 安放龍骨 | 下水時間 | 服役時間 | |
|
SSN-21 Sea Wolf |
1989/1/9 | 1989/10/25 | 1995/6/24 | 1997/7/19 | |
|
SSN-22 Connecticut |
1991/5/3 | 1992/9/14 | 1997/9/1 | 1998/12/11 | |
| SSN-23 Jimmy Carter | 1996/6/29 | 1998/12/5 | 2004/5/13 | 2005/2/19 | |
參考資料──張明德:全球防衛雜誌440期:海狼級核子攻擊潛艦的起源──探索洛杉磯級的後繼者
張明德:全球防衛雜誌442~444期:最後的冷戰型核子攻擊潛艦──海狼級潛艦的誕生
張明德:全球防衛雜誌445期:吉米卡特號核子潛艦
(1) (2)
|
基本設計 海狼級的艦體比洛杉磯級短而胖, 潛航排水量大幅增加至9000ton以上, 是美國海軍體型最大的核能攻擊潛艦。先前洛杉磯級 因為限制排水量而降低耐壓殼體厚度,導致潛航深度 降低,早期型洛杉磯級甚至不具備冰下操作能力(688-I才恢復級);而海狼級則完全恢復這些能力,帆罩結構經過強化,有足夠的能力突破北極海薄冰層;水平舵則比照洛杉磯改進型(688-I)設置於艦首 上方,不用時能折收回艦體內。海狼級艦尾設置十字型控制面,另外加上一對朝斜下方的二面角穩定鰭(Dihedral Fins)來增加航行穩定性,兩個拖曳聲納也由二面角穩定鰭末端施放。 海狼級沿用大鯧鰺級(Permit class)以來的簡化型淚滴艦體(首尾輪廓為淚滴型,中段艦體為單純的平行管狀構造),平直的艦體側面是安裝WAA寬孔徑陣列聲納的必要條件。如同前述, 最初美國打算完全以HY-130高張力鋼板 (屈服強度約990MPa,相當於91kgf/mm2)製造海狼級的耐壓殼體,但由於HY-130的加工難度過高,最後以HY-100高張力鋼板(屈服強度約900MPa,相當於70kgf/mm2)製造耐壓區域主(據說少數重點部位以HY-130製造) ;即便如此,HY-100的加工焊接程序仍非常困難,建造海狼級時焊接合格率只有50%,導致出現大量返工,增加了建造成本並拖延進度。 由於海狼級的耐壓殼厚度勝過洛杉磯級 (恢復以往美國潛艦的水準)且使用耐壓強度更高的HY100鋼板(據說少數部位用了HY130),外界推測安全潛航深度可達到1550至1600英尺(約472.4至488 公尺),超過先前鱘魚級的1300英尺(約395公尺);Janes等資料指出海狼級的作業深度可達到2000英尺(約610m),勝過全世界大部分的潛艦;而據信海狼級的極限壓潰深度約是2400英尺到3000英尺(731.52~914m)。早期 美國官方資料透露的海狼級潛航作業深度,則是含蓄的800英尺(243.8m)。
在北極突破冰層上浮的海狼號。 靜音性能/動力系統 1980年代起蘇聯核能潛艦的技術突飛猛進,尤其在靜音降噪方面有顯著進步。1980年代以降前蘇聯陸續推出的數種新式核能潛艦都擁有優秀的靜音能力,使 得美國潛艦原本在靜音能力與被動聲納系統的優勢迅速消逝。冷戰結束前,蘇聯最新型的鯊魚級 (Akula)核能攻擊潛艦的靜音能力已經達到洛杉磯級的水準 。照此種趨勢,冷戰末期美國預測蘇聯第四代核能攻擊潛艦(美國稱之為SSN-P-4)將於1990年代中期出現,而且肯定會比美國當時最先進的688-I 改良型洛杉磯級核能攻擊潛艦更加安靜。因此美國在設計海狼級時,費盡心思將其靜音性能提升至更高的境界,希望能讓美國潛艦部隊持續保持對蘇聯潛艦的聲噪優勢。 依照美國海軍官方宣稱,海狼級在所有作業航速的範圍裡,比改進型洛杉磯級(688-I)核能攻擊潛艦安靜10倍(降10 db),比原型洛杉磯級安靜70倍(降18.45分貝)。海狼級的靜音航速達20節左右,是688-I型的兩倍。整體而言,海狼級推進系統的靜音程度比688-I型提高75%,也就是不被聽音探測到的靜音航速比688-I型提高75%;甚至,海狼級以20到25節航行時產生的聲噪,比靜止狀態的原型洛杉磯級還低。 為了降低航行阻力, 海狼級的帆罩前方根部有一個填角結構,這是第一次出現在美國潛艦上的特徵。與688-I型一樣,海狼級所有的輪機都裝置在減震浮筏上,輪 機也考慮了配置與隔音,艦體外部覆蓋著可減低本身噪音且降低敵方聲納回波的橡膠隔音瓦,甚至很可能使用了主動降噪減震技術 。仗著艦體較大的優勢,海狼級的輪機 擁有雙層隔音制震基座(Double sound mount);先前洛杉磯級攻擊潛艦使用單層隔音基座(Single Sound isolation),也就是減震浮筏直接安裝在外部耐壓殼上, 輪機設備與外殼之間只有一層減震浮筏。而海狼級的雙層隔振系統中,輪機設備透過彈性基座安裝在減震浮筏上,浮筏透過彈性基座安裝在輪機艙,而輪機艙本身就構成一個封閉的浮動結構、透過彈性基座跟外部耐壓殼連結,因此輪機到外殼之間總共有三層彈性隔振,加上浮筏體以及外頭整個浮動艙區的隔離(過去美國潛艦可能只有俄亥俄級 才有最多三層的隔音減震措施),使得傳入海中的噪音與震動更少。此外,海狼級總共有26個散佈於全艦的噪音、震動偵測器,能檢查本身不明的噪音或震源,以 進行修正,而洛杉磯級只有裝9個 。 海狼級的艦殼外部覆蓋了一層消聲瓦(Anechoic tile),可降低敵方主動聲納的效能。過去洛杉磯採用薄板型玻璃纖維復合材料消音 瓦,並以薄膜加壓工藝進行黏貼,而據說海狼級則採用更先進、以聚氨酯(urethane)為材料消音瓦,並採用整體澆注工法製作。傳統的消音瓦以丁基、丁苯橡膠或如洛杉磯級所 使用的玻璃纖維消音瓦,最大衰減聲波頻率集中在中低頻段,當敵方聲納波頻率低於2KHz以下時,其效能便急遽下降,至1.4KHz以下便喪失消音性能。現 代化聲納為了增加偵搜距離,操作頻率都向極低頻發展(例如2000年代陸續出現的各型低頻主動式拖曳陣列聲納),許多系統的工作頻率都低於2KHz,使傳 統消音瓦的效果大幅下降。然而,採用聚氨酯材料的新一代消音瓦能吸收低頻聲納波,部分資料顯示其衰減臨界值可以降低到500Hz左右,部分國外研究機構甚 至認為有達到200Hz的潛力。 海狼級使用一具S6W反應器,熱功率220MW(約30萬馬力),輸出功率約38.8MW(52000馬力)至43MW(約57000軸馬力);S6W反應器擁有十分複雜的循環迴路熱交換系統,自循環比率據信超過30%,意味著 能在更廣泛的工作狀況下單純靠自然循環(包括熱對流以及潛艦與海水相對速率帶來的衝壓)工作而不需要啟動泵浦強制循環,降低了運轉噪音。 海狼級潛艦集合各項最先進靜音科技於一身,締造了同時期世界最頂尖的靜音水平,戰術航速是688-I改進型洛杉磯級的兩倍以上。據說海狼級在航速23節以內,反應器不需要開啟泵浦為熱循環迴路加壓,只需要靠自然循環就能運轉 ,意味著海狼級在更廣泛的戰速下不產生循環泵噪音。提高靜音戰速航速使海狼級能在相對安靜的情況下減少逼近目標的時間,同時在相對較高航速下降低對拖曳陣 列聲納的干擾(美國潛艦通常配備TB-29長拖曳聲納與TB-16短拖曳聲納,較短的TB-16適合在相對較高的速度下操作,據信能操作的拖曳航速在10 節以上)。 航速方面,在大功率S6W反應器 支持下,海狼級的高速性能優於洛杉磯級。海狼級的水面航速達18節,水下航速可達35節 ;有消息指出,海狼級在試航時曾經達到39節以上的航速。甚至有傳言,海狼號在測試水下最大航速時,由於速度過高,艦外部分物體被強大的水流扯掉,於是美國海軍為海狼級制訂操作航速的上限。由於S6W較大的爐體以及複雜的循環迴路系統,使得海狼級的艦體尺寸必須夠大才容納得下,排水量與造價也扶搖直上。 泵噴推進器
建造中的 海狼級二號艦康乃狄克號(USS Connecticut SSN-22),注意艦尾的泵噴推進器。 海狼級降低噪音、提高戰術航速(通常是推進器不產生空蝕效應之下能提供的最大航速,使潛艦不至於發出過大噪音干擾自身聲納 )的一大關鍵,是以泵噴推進器(Pumpjet Propulsor,又稱尾管推進器)取代傳統螺旋槳。泵噴推進器最先由英國推出,首先裝備於快捷級(Swiftsure class),之所有的英國核能潛艦都採用此種推進器;而美國從海狼級開始,所有核能潛艦全部以泵噴取代傳統螺旋槳推進器。 傳統的潛艦螺旋槳推進器主要有兩個缺點:第一是產生空蝕(Caviation)現象,螺旋槳高速攪動水流時,由於無法完全均勻地施力於水流場、局部水壓急降而形成真空氣泡(線速度最快的槳葉尖端率先發生),氣泡離開螺旋槳表面時破裂,即稱為空蝕。空蝕不僅會侵蝕螺旋槳表面,更嚴重的是大量氣泡一起破裂時產生過大噪音,危害潛艦的隱匿性。第二個缺點是螺旋槳製造的水流場並非百分之百都向正後方,仍有局部水流朝其他方向,意味著螺旋槳產生的推力並非全部都能用來推進;而且,螺旋槳攪動過的水流會在槳葉後方產生一些不規則的渦流(vortices),進而在螺旋槳後方製造了一個低壓區,將潛艦向後吸,降低了推進效率,而這些渦流也會增加一些流體噪音。 到1970、80年代左右,世界主要先進潛艦開始使用七葉片大側傾螺旋槳,使用七個高彎曲度、大側傾角的槳葉,取代以往潛艦常見的五葉片圓形槳葉。七葉片大側傾螺旋槳一方面透過增加槳葉數量來提高螺旋槳聲噪頻率(頻率越高則在海中傳遞距離月短),再者透過加大槳葉傾斜角度來改 善槳葉表面的壓力分布,使得槳葉產生的空泡分布較為均勻,避免大量空泡集中破裂而産生很大的空蝕噪聲;然而這些設計也是需要謹慎取捨的,例如為了延遲槳葉端的空泡形成,必 須使用較大的葉梢卸載措施,但葉梢卸載量若取太大,則又會導致葉梢産生不穩定面空泡。在深海中海水靜壓強較大,靜壓力與海水空化壓力相距較大,即使轉動的 螺槳使得槳葉背面海水壓力降低,但仍未達到空化壓力,所以可延遲空蝕發生。除了增大傾斜度外,也增加槳葉數量,讓每面槳葉承受的力道減少,並降低葉背的負 壓,可延遲空蝕的發生,換而言之也使靜音航速增加,同時使得水流後掠角相度增加,較不容易發生葉背面水流分離而導致的低壓空泡 現象。此外,槳葉數目越多,加工越困難,而且倒 車性能會降低。槳葉舷長比越大,抗振動性能越好,但推進效率會下降。 在大側傾七葉螺旋槳實用化之後,西方國家繼續改善潛艦推進器的靜音性能。首先,為了抑制槳葉末稍產生氣泡的空蝕現象,出現了帶環螺旋槳(Ring Propeller),在螺旋槳外圍增加一個環,連結每個槳葉的尖端。此種設計的確可以顯著改善螺旋槳葉尖端產生空蝕氣泡,然而空蝕仍然會在槳葉比較下緣的位置發生;當然,槳葉發生空蝕的位置下移,代表會產生空蝕的轉速提高,也意味螺旋槳在產生空蝕之前能提供更高的推力。 而為了消除螺旋槳推進器後方的渦流,開始出現一些設計;例如英國在潛艦螺旋槳後方增設一組小型同軸螺旋槳,稱為渦流消除器(vortices defuser),旋轉方向與大軸相同但槳葉傾斜方向與主推進器相反,用來抵銷主推進器後方渦流產生的低壓區。據信皇家海軍潛艦泵噴外罩內,都採用這種設計。 在1980年代美國海軍設計海狼級潛艦時,一個重點就是設計效率更高、更安靜的新型推進器,而他們決定發展比帶環螺旋槳或加裝渦流消除器更好的方案。一開始,美國海軍曾考慮使用一組同軸反轉螺旋槳以產生更多推力,但這會讓推進系統複雜化(美國潛艦向來都是單軸單槳設計,沒有驅動同軸反轉螺旋槳的條件);爾後他們想出一種導管推進器,將推進器包在一個管狀整流罩中,並且以嶄新形狀的轉子來取代傳統螺旋槳,而這就是泵噴推進器(pump jet)。新的轉子外型相當於將槳葉倒放,轉子的弦長涵蓋整個整流罩的長度。 泵噴推進器的基本結構由外部整流罩,以及整流罩內的導管、轉子、定子以及相關機構組成。 泵噴推進器的基本原理類似渦輪噴射發動機的壓縮段設計,導管類似噴射發動機的進氣道(前端為進氣口、後端類似噴嘴),裡面至少有一層定子與一層轉子(以單軸推進的美國潛艦為例,轉子只有一層)。如此,水流進入泵噴推進器是經過導管整流,通過數級的定子與轉子(定子減速、轉子加壓)然後由噴嘴噴射出去,水流加速過程比起傳統螺旋槳更為緩和而穩定。 相較於與海水直 接接觸的螺旋槳,泵噴的轉子包在導管內,轉子的前方或後方又有導向定子,導管與定子對進入的海水進行整流,使轉子葉盤得以在更均勻、流向一致的水流場中工作。泵噴推進器的轉子弦長涵蓋整個導管的長度(數公尺長);因此,海水從流進導管到經過泵噴加速離開導管,經過比較長的距離(傳統螺旋槳則是在數英尺的距離上把通過的水攪動加速),再加上導管的整流與沖壓作用,使得水流加速的過程更為平緩穩定,紊流大幅降低,顯著延緩了紊亂水流產生氣泡空蝕的效果,使轉子在高速範圍內具有很好的抗空泡性能,並大幅提高空蝕航速(Cavitation Speed),這讓潛艦的戰術靜音航速大大地增加。導管會強迫通過轉子的水流全部筆直往後成為推力,不像傳統螺旋槳會將部分水流推向其他方位,所以效率較高。 泵噴導管的設計由長度直徑的比例與截面形狀來控制,長徑比大則阻力大,減速能力較好,而長徑比小者的特性則是阻力小、減速性能較低,目前一般潛 艦用泵噴的長徑比約在0.6至0.8之間;而導管 根據截面積形狀設計又可分為加速與減速兩種,加速導管的內部突起,讓進入的水流受到壓縮而使流速增加,推進效率較高,但空蝕現象較大,減速導管的特性則相 反。此外,由於泵噴推進器轉子的數量傳統螺旋槳高得多,轉子轉動的聲噪「基頻」自然也大幅提高,而高頻聲噪在海中衰減速率較快、傳遞距離較短。根據通用動力(GD)一篇相關論文,泵噴推進器定子與轉子的運作模式類似同軸反轉螺旋槳,其聲噪頻率是「(定子葉片數+轉子葉數)乘以 每秒轉數」,比起傳統單螺旋槳的「轉子葉片數乘以每秒轉數」來得高。 依照定子與轉子的相對位置,泵噴推進器又分為前旋與後旋兩種,定子在轉子之前稱為前旋,定子在轉子後稱為後旋。轉子的弦長比越大,對於延遲空泡產生 越有利,但是盤面比增加,推進效率下降(與螺旋槳情況相同);而定子與轉子之間的間隙越大,噪音則越小,因為較小的間隙容易使水流在定子與轉子間互相干 擾,產生高頻的離散噪音。長期實驗證實轉子與定子數量為質數時噪音較小,因此轉子與定子的葉片數最好是7、9、11、13等數字,且定子葉片必須低於轉子 數;此外,前旋設計的尾流控制能力較好,結構較為輕便,但是空蝕效應較大,後旋的特性完全相反。大部分潛艦泵噴使用性能較好的前旋搭配靜音性能較好的減 速管設計作為折衷,如英國特拉法加級、先鋒級等,而海狼級則使用靜音性能較好的後旋設計。根據美國海軍公開資料,海狼級的噴泵推進器的噪音是洛杉磯級的螺 旋槳推進器的1/100。 與一般螺旋槳相較,泵噴的 推進效率提高約50%,能在更低轉速下提供與螺旋槳相同的推進功率,所以空蝕現象、噪音與震動都大幅降低,加速更為平穩,而且有外殼保護內部轉子,更適合 在雜物較多的淺水環境下操作。 而泵噴系統的主要缺點在於 結構複雜,重量較大,造價昂貴;相較於傳統螺旋槳,泵噴多出了外罩以及多層定子、轉子,阻力與重量增加,推進效率自然下降,且影響縱向穩定性,加速與倒車性能也稍差。此外,泵噴推進器在低速運轉時效率好,但高速性能則相對犧牲,因為泵噴折損的推力較多。
聲納/電子系統
建造中的海狼級的艦首球型陣列聲納,上為直徑24英尺的大型球型被動陣列聲納,外圍架設 低頻被動陣列聲納;球型被動陣列聲納下方設置了主動陣列聲納。 海狼級配備先進的聲納與電子系統,最主要的為AN/BQQ-5D整合式聲納套件,包括艦首大型主/被動球型陣列聲納、位於艦身兩側的AN/BQG-5寬孔被動陣列聲納(Wide Aperture Arry,WAA)以及TB-16與TB-23被動式拖曳陣列聲納各一;此外,艦首還有一具AB/BQS-24高頻近距離主動聲納,用於冰下環境以及水雷 偵測 ;爾後這套聲納又升級為BQQ-5E,包括以更長的TB-29拖曳陣列聲納取代TB-23。 海狼級的艦首陣列聲納由大型球型被動陣列聲納、主動陣列聲納以及低頻被動陣列聲納組成,被動聽音陣列以及主動陣列分離。其中,球型被動陣列聲納直徑高達24英尺(7.3152m),遠大於洛杉磯級的BQS-13球型陣列聲納(直徑15英尺、約4.57m);主動陣列聲納的環形陣列位於被動陣列聲納下方。而球型被動陣列聲納外圍還架設低頻被動聲納陣列,陣列的聽音器組件布置在三層架子上。 AN/BQG-5寬孔被動陣列聲納(WAA)是當時美國海軍新開發的被動陣列聲納,其電子佈線與高精密度聽音 陣列都裝置於艦身外,可降低潛艦本身噪音造成的干擾 ;WAA包含六個突出艦體的聽音陣列,兩舷各三個,是海狼級的外型特徵之一,此一聲納系統以計算聲音到達三個陣列的時間差來估測量目標距離。每個WAA陣面的長度與寬度都比較大,較大的寬度(垂直向)允許聽音波束做更大的垂直向調整,可提高聽音涵蓋面、對準海水匯聚的特定方向或者避免噪音干擾。BQQ-5D 聲納套件的被動聲納部分位於艦首,搭配艦身兩側的WAA,再加上負責後方的拖曳陣列聲納,使得海狼級擁有極佳的被動聽音涵蓋面 ,WAA與拖曳陣列聲納則讓海狼級獲得更好的低頻噪訊截獲能力。海狼級的TB-16拖曳陣列聲納與洛杉磯級一樣,裝置於突出於艦 體右上方的管子內,而TB-29則整合於艦體另一側的壓力殼內;而TB-16與TB-29拖曳陣列聲納分別從艦尾兩個朝斜下方的穩定鰭末稍的開口施放。 海狼級裝備了電子戰、聲納信號警告與通訊系統,例如諾格公司的AN/WLY-1水下 聲學警告/反制系統以及GTE WLQ-4(V)1電子反制系統。AN/WLY-1是先前洛杉磯級使用的AN/WLR-9A水下聲學警告/反制系統的後繼型,源於潛艦防禦作戰系統 (Submarine Defensive Warfare System,SDWS)計畫,為潛艦提供更好的水下環境意識與生存性。AN/WLY-1結合被動水聲探測裝置、後端信號處理、控制裝置、反制裝置(含聲 學誘餌發射管、聲噪干擾器等)等,自動截收敵方聲納信號(來自潛艦、水面艦、艦載直昇機或聲納浮標等)、魚雷聲納尋標器等,自動進行識別、威脅來源定位與 動態追蹤,包含曲折路徑(curvature)以及多路( multipath)測距;發現威脅後,後端控制系統會發出警告,並根據威脅型態以及動態,自動擬定最適當的作戰方案並組織各種水下反制裝置(包含聲噪干 擾器、聲學誘餌發射管等)進行自衛作戰。海狼級配備柯爾摩根光學公司(Kollmorgen Optical Company)的Type-8J Mod3搜索潛望鏡與Type-18H Mod1潛望鏡,其中Type-8J Mod3附帶EHF低頻截收機以及衛星通信天線,而Type-18H Mod1則是先前洛杉磯級的Type-18的改良型,裝配了新的光學電子系統。 在2008年,美國海軍決定為海狼級與洛杉磯級的Type-18潛望鏡進行升級,加裝一套RemoteReality的光電偵測套件,以一個解析度12M pixels的光電攝影機取代原本只能提供窄視角的傳統光學鏡頭,新鏡頭可提供360度權方為焦點視圖,或即時捕捉高解析度圖像;此外,還整合一具不需要冷卻的新型紅 外線熱影像儀(640X480),供夜間使用,而潛艦控制室內也會配合加裝後端的彩色平面顯示器與控制、顯示軟體。此系統從2008年中開始在洛杉磯級上 進行測試。 到2010年代後期,海狼級的聲納系統的水聲裝備升級到AN/BQQ-10(ARC-1)水平,硬體架構升級到APB-15水平。 作戰系統
海狼號的飛彈發射控制台。攝於1997年7月16日。 美國 海軍第一種完全整合艦上所有聲納、運算與射控系統 戰鬥系統是1980年代發展的AN/BSY-1,當時美國潛艦戰鬥系統分成兩階段,第一階段的AN/BSY-1裝備於改良型洛杉磯級(688-I),第二階段的AN/\BSY-2用於海狼級上。AN/BSY-2由奇異(GE)航太公司 承包,整合有雷松CCS MK-2戰鬥指揮系統,具有10個功能可互換的工作站與3000個Motorola系列處理器,總共有102個單元,各次系統經由高速區域網路連結在一起;萬一 有部分工作站失效,其餘顯控台能立刻接手其執行的工作。在日後的翻修改良中,海狼級將戰鬥系統換成 與維吉尼亞級核能潛艦相同、開放式架構的AN/BGY-1作戰系統(硬體架構為2016財年為基準的TI-16) 。 武裝 與 以往的美國潛艦相比,海狼級無論在魚雷管數量、口徑或武器籌載量都大幅增加,以加強武器投射能力與持續作戰時間。如同前述,為了減少魚雷發射時的噪音,美國海軍規劃海狼級時就打算使用口徑比原有21吋(533mm)更大的魚雷管。美國海軍考慮過的最大魚雷管口徑是30吋(762mm),曾在一艘洛杉磯級潛艦曼非斯號(USS Memphis SSN-691)上裝置一門30吋魚雷管進行測試;後來正式決定的口徑是26吋(660mm),此種魚雷管型號為MK-69。 海狼級的MK-69魚雷發射管搭配的武器彈射裝置是MK-21型渦輪氣壓幫浦(Air Turbine Pump,ATP),由高壓氣體驅動一組渦輪泵浦,抽取艇外海水注入發射管;發射時,渦輪泵浦將海水高速帶入發射管,將管內的武器打出去。老式的高壓空氣 魚雷發射裝置係先將魚雷外門打開注水,注水完畢後再啟動高壓空氣筏把魚雷打出去,這種方式很容易使高壓空氣一起進入海水中,隨即釋放大量氣泡,產生持續的 轟隆巨響,而氣泡浮上水面時也容易暴露潛艦位置;雖然爾後出現了回收高壓空氣的設計來減輕這種問題,但隨之而來的卻是收回艇內的高壓空氣造成魚雷艙壓上 升,造成艙內人員身體不適。而氣壓渦輪則沒有高壓空氣進入海水或回收氣體導致艙壓升高的問題,雖然發射時仍有噪音,但不是壓縮空氣的轟然巨響,更沒有高壓 空氣入水而衍生的氣泡問題。 早期如洛杉磯級潛艦的固定排水量線性泵驅動水壓彈射魚雷管相較,海狼級的MK-21渦輪氣壓泵組件以旋轉代替直線運動,整個系統的體積重量更低,維修更便 利,發射時產生的噪音減少, 並具備更廣的發射包絡(即與更多種類的武器相容)、發射前的準備週期更短等優點。 海狼級總共有八門MK-69 660mm魚雷管,較以往的美國潛艦多出一 倍 ,意味著每次裝填武器之後能接戰的次數多一倍,武器籌載總量更大增至50件(武器艙內儲存42件,加上魚雷管預先裝填8件) ;由於海狼級是專門用來獵殺蘇聯潛艦,所以並未配備專門裝填陸攻飛彈的垂直發射器,艦上可用的武裝包括MK-48 ADCAP線導魚雷、魚叉反艦飛彈、戰斧巡航飛彈等,並打算配備當時規劃的先進陸攻飛彈(ALAM,後來未成)。由於反潛獵殺是主要任務,即便攜帶戰斧巡航飛彈,預定的數量也僅有12枚。海狼級的魚雷艙配備半自動裝填系統,結合人力以及動力機械輔助。 據說海狼號試航時,曾發現航速高於25節的情況下,艦首產生的強大水流會導致魚雷管外門無法開啟,需要減低航速;據說這個問題曾導致海狼號延後服役,日後解決的情況並不清楚。 實際上,由於潛艦進行對潛作戰時,通常會降低航速,避免潛艦自身噪音干擾被動聲納運作,因此發射魚雷的航速通常不會太高。 SSN-23的設計變更 在1994年初,美國國防部批准建造第三艘海狼級(SSN-23)時,美國海軍內部就開始討論修改SSN-23的設計,適應後冷戰時代的新需求,例如強化在沿岸支持特種作戰部隊的能力。相關討論方向包括:可以利用魚雷艙空間,載運至多50名海豹特戰部隊(SEAL),並擴大潛水人員使用的加減壓艙室,每次作業能讓更多潛水人員進出潛艦;此外,擴充通信與指揮設備,以充分支持特種部隊進行作戰的指揮聯繫需求;艦上也必須能收容特種部隊的運輸載具,例如加掛乾式甲板換乘艙( Dry Deck Shelter,DDS)來收容開放式的MK-8海豹小組輸送載具(Seal Delivery Vehicle,SDV),或者當時開始研發的封閉式先進海豹輸泳系統(Advanced SEAL Delivery System,ASDS)。過去美國海軍通常改裝一些壽命進入末期的潛艦,加裝這類特戰支援設施來執行滲透任務,包括部分鱘魚級核能攻擊潛艦、富蘭克林級彈道飛彈潛艦等。因此在這個階段,SSN-23的設計構想相當於在前兩艘海狼級的基礎上,優化支持特種作戰的任務彈性,整體變更幅度還不算很大。 在1998年4月28日,SSN-23舉行命名儀式,命名為吉米.卡特(USS Jimmy Carter SSN-23);這是第一艘用美國前總統命名的核能攻擊潛艦,在此之前美國前總統用於潛艦,都是早期配備北極星彈道飛彈的核能潛艦(共有12艘)。 而美國海軍從1960年代逐步建立並發展成熟的海床搜索打撈回收、情報蒐集的特種任務能力,在冷戰結束後因為國防經費刪減而面臨存亡之秋;因此,隨後美國海軍內部也透過建造SSN-23的機會,加入這類特殊任務的能力。 這類機敏任務始於從1960年代,發展這項任務的契機包括1963年長尾鯊號(USS Thresher SSN-593)核能攻擊潛艦失事後的殘骸搜尋、觀測等任務;而美蘇冷戰期間,雙方遺落在海床上的機敏武器(例如蘇聯試射的彈道飛彈的重返載具或戰術飛彈的殘骸,或者是1968年一艘蘇聯高爾夫級彈道飛彈潛艦K-129在夏威夷海域沈沒)都是需要快速打撈的高價值物品;此外,還有在敵方海底電纜裝設竊聽器,並且定期更換錄音帶的需求(例如1970年代開始的「長春藤鐘」(Operation Ivy Bells)任務)。在1960年代,美國海軍特別計畫辦公室(Special Project Office)在首席科學家約翰.克雷文(John P. Craven)的領導下,逐步建立並完善美國海軍的深海搜索以及打撈能量,相關的硬體裝備包括水面研究船搭載的小型深海作業載具、在1960年代後期建成高機敏的NR-1核子動力研究潛艇等。而從1970年代起,美國海軍固定會將一艘進入服役後期的核能潛艦改裝成支持水下搜索/打撈/情報蒐集的機敏任務平台,第一艘是比目魚號(USS Halibut SSGN-587)核能攻擊潛艦(1968到1970年進行改裝,1976年6月除役),第二艘是前一代海狼號(USS Sea Wolf SSN-575)核能攻擊潛艦(1971到1973年改裝,1987年3月除役),第三艘則是鱘魚級核能攻擊潛艦的蝴蝶魚號(USS Parche SSN-683,1987至1991年改裝)。 冷戰結束後,美國國防預算遭到大幅刪減,這類海床搜索、打撈回收任務也被列入取消的清單中。當時擔負這項任務的蝴蝶魚號排訂在2000年代初期除役,此後美國海軍就不再擁有這種能力。當年領導美國海軍發展這類任務能力的約翰.克雷文雖然已經離開美國海軍多年,但仍十分關心這項深海研究打撈計畫的未來。由於擔心這項深具戰略價值的能力喪失,約翰.克雷文在1990年代初期將此計畫透露給紐約時報報導,指出美國海軍這項珍貴的能力,即將面臨流失的危機。約翰.克雷文的撰文,可能在美國海軍外部起到一定的公關影響作用。 在此同時,美國海軍苦思後冷戰時代核能攻擊潛艦的任務轉型時,也把在水下操作各種無人遙控載具(Remote Operating Vehicle,ROV)的能力列為重點。在1995到1998年,美國國防部先進計畫研究局(Defense Advanced Research Projects Agency,DARPA)、國防部科研委員會(National Defense Research Committee)、美國國家安全工業協會(National Defense Industrial Association,NDIA)以及通用電船等,針對未來潛艦作戰的研究,都把支持彈性籌載、在水下操作收放各型無人載具列為重點。 例如在1998年年底,美國海軍加入一項由國防部先進計畫研究局(Defense Advanced Research Projects Agency,DARPA)資助的未來潛艦概念研究項目;這個項目起源於知名航電專家約翰.斯坦彼特(John Stenbit)帶領的「未來潛艦」(Submarine of the Future)工作小組的成果;該小組在1998年7月公布了新一代潛艦報告,對下一代核能攻擊潛艦的描述是:必須是一種擁有快速反應能力的高性能作戰艦艇,武器籌載應該是彈性的通水籌載介面(Payload Interface),而不是傳統的魚雷管、垂直發射器等單一用途介面;新的彈性籌載介面能搭配不同的武器、輔助載具或其他籌載,且不應該對這些籌載的尺寸規格造成制約。約在在斯坦彼特小組報告的基礎上,DARPA與美國海軍在1998年12月啟動了新的未來潛艦概念研究計畫,打算以「全新的、技術上積極進取的角度」,構想未來潛艦的設計。在1998年12月10日,DARPA、美國海軍以及美國潛艦承包商舉行一項研討會,會中提到未來潛艦的四項關鍵能力:通信聯繫能力(Connectivitive)、趕測器(sensors)、有效籌載(Payload)以及支援平台(Supporting Platforms)。對於未來新潛艦的能力,DARPA與美國海軍對承包商列出八項革命性的潛艦技術方向,包括透過潛艦拖曳或由潛艦支援的有人/無人潛航載具、全新的潛艦構造、彈艙(bomb-bay)式的彈性籌載艙來容納武器或潛航載具、擴展運用舷外(off-board)感測器...等。 因此,如果把SSN-23轉變成支持水下搜索打撈特殊任務的潛艦,同時也提供了一個水下載具的操作平台,並引進通用水下操作介面來收容各種載具,支持各項關於水下載具的測試研究工作。通用水下操作介面包括潛水人員(執行水下識別、打撈、爆破等任務)所需的大型加減壓艙,具備支持水下特種作戰部隊的潛力。在冷戰結束後軍費困難的現實下,美國海軍遂決定利用SSN-23這個珍貴的建造新潛艦的機會,滿足前述深海搜索打撈、實驗通用彈性水下籌載介面、操作水下載具等任務需求。 在1999年12月10日,美國海軍與通用電船簽署8億8711萬3628美元的合約修改(合約代號N00024-96-C-2108),變更正在建造的第三艘海狼級潛艦吉米卡特號(USS Jimmy CarterSSN-23,該艦在1998年12月5日安放龍骨)設計,成為機敏任務(包含特種作戰、海床搜索打撈、情報蒐集監視、水雷作戰等)的作戰平台。這項修改最主要是在帆罩之後居住區以及反應器艙中間,插入一段長100英尺(30.48m)的分段,稱為 多任務平台(Multi-Mission Platform,MMP);而除了插入MMP平台之外,其他艦體設計都不需要重大修改。MMP內部結合了潛水人員/特戰部隊所需的相關設施 ,包含能讓潛水人員以及水下載具進出作業的大型加/減壓艙,以及武器模組、遙控載具、拋出式偵測器(Distributed Sensors)以及若干射後不理武器 (Leave Behind Weapons)等等,包含美國海軍開發的無人遙控載具如釋出式載具(Stand-off Vehicles)、無人水下載具(Unmanned Underwater Vehicles,UUV)乃至無人飛行載具(Unmanned Aerial Vehicles,UAV)等。MMP艙區整合所有需要的管路與電纜線。
吉米卡特號(SSN-23)艦體插入的多任務平台(MMP)艙區, 攝於建造期間。
吉米卡特號(SSN-23)的多任務平台(MMP)船段在通用電船廠區移動。 MMP艙區的前1/3是與船舷同寬的單殼結構,其後2/3則是雙殼結構,此區域耐壓區域直徑減小、向內收縮,最細的部位是一個寬4呎(1.22m)的管狀人員通道,可讓2位乘員並肩通過,所以得到「蜂腰」(wasp waist)或「細腰」的稱呼;這個通道也是艦內從前部艙區通過MMP非水密區域到後部艙區(反應器、輪機艙等)的通道。MMP雙殼部位的外殼與前、後船殼殼融為一體,內、外殼之間是注水區域;這樣的設計使得安裝在蜂腰區域外殼的艙蓋以及附屬設備,不需要突出潛艦外型輪廓。MMP艙區包括一個大型加減壓艙,稱為海洋介面(Ocean Interface),作為人員或ROV遙控載具進出非水密區的介面;而人員與裝備載具進入非水密區之後(內部水壓與外部海水相等),就從外部艙門離開潛艦。MMP艙區前段(單殼區)的耐壓殼是包括儲存各種任務籌載的庫房(包括特戰裝備、ROV等),後部則是任務指揮中心,這些內部艙區都可根據不同任務需求(水下打撈、情報蒐集或特種作戰)而重構。MMP的人員出入/接駁艙口以及配合遙控載具的信號纜線、繫留絞盤等機構和次系統,均設置在MMP艙區內殼與外殼之間的非水密區域,不佔用耐壓殼內的空間。MMP的內部水密艙區包含執行特殊任務的人員的舖位,可容納至多50名任務人員,如美國海軍三棲特戰隊(United States Navy Sea, Air and Land Teams,SEAL)人員、潛水人員等相關附屬人員。 除了MMP之外,吉米卡特號也有增加一些新特徵來配合特種任務,包括在帆罩後部增設先進浮標式通信桅杆,以及在艦首下方增設一個可轉向的伸縮式小型電力推進器(平時收在艦首壓載艙內),配合原本就有、設置在艦尾的可轉向伸縮式輔助電動推進器,在執行特殊任務期間(如在海床上搜索打撈)可以精確保持船位。 增加MMP 讓吉米卡特號的重量增加2500噸,潛航排水量超過12000噸,成為美國海軍有史以來排水量最大的核能攻擊潛艦(在美國海軍核能潛艦史上僅次於俄亥俄級核能彈道飛彈潛艦),最大航速約降低4節,航速20節時的噪音也比前兩艘海狼級略增2dB。 原本美國海軍認為吉米卡特號的設計修改,會使整體工期延長15個月,不過實際工作量遠大於此;吉米卡特號下水 的期程從最初的2001年延後至2004年6月,足足延長了40個月,總建造工期約6年3個月,與海狼級二號艦康迺迪克號(SSN-22)相當。在2004年9月,吉米卡特號移交美國海軍,2005年2月19日正式服役,接替了先前執行這項任務的蝴蝶魚號(2004年10月除役);等到1969年建成服役的NR-1核能研究潛艇在2008年除役後,吉米卡特號成為美國海軍為一一艘具備海床搜索與打撈能力的潛艦。由於設計變更以及通貨膨脹,吉米卡特號的造價高達35億美元,較前兩艘海狼級 的二十多億美金級又大幅攀升,是目前全世界最昂貴的核能攻擊潛艦。 利用第三艘海狼級作為特殊水下搜索打撈平台,這個決定也引發部分爭議。過去美國海軍都是改裝進入服役後期的核能攻擊潛艦擔負這種任務,算是「發揮餘熱」,包括比目魚號(USS Halibut SSGN-587)、前一代海狼號(USS Sea Wolf SSN-575)、鱘魚級核能攻擊潛艦蝴蝶魚號(USS Parche SSN-683)都不例外。然而吉米.卡特號卻是把時下美國海軍最新銳的核能攻擊潛艦,而且一開始就以這種規格建成。雖然吉米.卡特號理論上仍然具備擔負一般核能攻擊潛艦勤務的能力,然而依照過去經驗,實際上轉換成水下搜索任務的潛艦,都不會用來執行一般核能攻擊潛艦的作戰部署任務。海狼級是美國海軍作戰能力最強大的核能攻擊潛艦,而且只建造區區三艘,其中一艘被永久轉為特殊任務平台,無法發揮海狼級原有的戰術價值,某種角度上的確堪稱浪費。然而,1990年代冷戰結束後美國軍費緊縮,恐怕不太有機會再將一艘洛杉磯級核能攻擊潛艦改裝作為特殊用途,因此在1990年代美國海軍一片「轉型」風聲中,利用建造最後一艘海狼級的機會達成這個目標,算是這個時機下的合理發展(海狼級只建造三艘,運用上注定很難成為海軍主力潛艦);況且,如果一開始就建造一艘全新的特殊任務潛艦,整個服役生涯都能用在此類任務,比起改裝服役後期的舊艦,更能確保美國海軍在較長一段時間,繼續維持水下搜索打撈的特殊能力。 在2001年吉米卡特號還在建造時,美國國家安全局(National Security Agency,NSA)主管 Michael Hayden少將接受華爾街時報(Wall Street Journal)報導時,曾拒絕討論關於吉米.卡特號的任務。 服役經歷 由於海狼級數量稀少,而且具有極端寂靜的優勢,因此在艦隊中可能以執行高機敏性、高風險任務為主,包括各種情報蒐集與偵察、跟蹤敵方潛艦蒐集聲紋數據等。 由於海狼級只少量建造三艘,加上具有極佳的靜音能力,因此被美國海軍專門用來執行高機敏性、高風險任務,包括各種情報蒐集與偵察、跟蹤敵方潛艦蒐集聲紋數據等等。三艘海狼級都編入執行特殊機敏任務的第五潛艦開發群( Submarine Development Squadron Five);依照第五潛艦開發群的網站公開信息,該單位的工作包括測試新的水下聽音設備、遙控潛航器等,此外還負責協助研究在北極冰洋下作業的新戰術技術,而北冰洋是潛艦能輕易隱藏蹤跡的地方。 在2007年,海狼號(USS Seawolf SSN-21)的140名人員獲得集體功勳單位獎章(Meritorious Unit Commendation,MUC);在2009年,海狼號再度獲得海軍單位獎章(Navy Unit Commendation,NUC),這些受勳紀錄都意味著成功完成了某些高風險的任務。
此照片攝於海狼級二號艦康乃迪克號(SSN-22)在2003年於ICEX 2003演習時突破冰層上浮 期間;一隻北極熊前來探查康乃迪克號突出冰層的垂直尾舵,整個過程都被康乃迪克號的 潛望鏡拍攝,並投影在控制室的顯示屏上。這隻北極熊探查了康乃迪克號尾舵長達40分鐘才離開,期間並沒有造成康乃迪克號的損傷。 在2011年3月,海狼級二號艦康乃迪克號(USS Connecticut SSN-22)以及一艘維吉尼亞級(Virginia class)核能攻擊潛艦新漢普夏號(USS New Hampshire SSN-778)從阿拉斯加普拉德霍灣( Prudhoe Bay)出發,前往北極進行ICEX演習;美國海軍曾透露,康乃迪克號的任務與美國海軍和華盛頓大學應用物理實驗室(University of Washington Applied Physics Laboratory)的合作項目有關,包括測試裝備、在冰下環境進行特定的操作等。 在2009年9月,海狼號進入乾塢展開為時三年的更換燃料棒與大修工程,並在2012年4月重回太平洋艦隊服役。在這次翻修中,海狼號更新了艦上許多裝備,例如換裝與維吉尼亞級核能攻擊潛艦相同的AN/BGY-1戰鬥系統等。 吉米卡特號的特殊任務經歷 依曾在CIA、NSA擔任技術人員的愛德華·斯諾登(Edward Joseph Snowden)於2013年6月披露的NSA機密資料,吉米卡特號的 其中一項任務,就是在各國海底電纜設置監聽裝置以及定期收取資料,或者在海床打撈敵國機敏軍事武器裝備的碎片等;這類任務延續自冷戰時代的「長春藤鐘」(Ley Bell,詳見比目魚號核子動力巡航飛彈潛艦一文)等,新的任務代號包括「Oakstar」、「Stormbrew」、「Blarney」 和「Fairview」等,而這類任務都與NSA高度相關。在吉米卡特號服役之,這類任務由經過特殊改裝的鱘魚級核能攻擊潛艦蝴蝶魚號(USS Parche SSN-683)負責,該艦在2004年10月除役。蝴蝶魚號在1987年至1991年的改裝中插入了一段長30m的新分段來容納特殊任務裝備,而吉米.卡特號就接收了蝴蝶魚號的裝備與任務。吉米卡特號增加的MMP分段能搭載專業潛水人員,在海床上尋找特定通信電纜,並在上面安裝監聽設備。與蝴蝶魚號相同,吉米卡特號也編制在第五潛艦開發群( Submarine Development Squadron Five)。 在2013年1月11日,海狼級核能攻擊潛艦吉米.卡特號從駐地基察普海軍基地(Naval Base Kitsap)啟航,進行了為期5天的部署前測試(Pre-Deployment Testing)作業。隨後在1月20日, 吉米.卡特號正式啟程,進行一項名極機密任務,代號為「7號任務」(Mission 7),在5月9日完成。
在吉米.卡特號的年度歷史(chronology),對於「7號任務」的描述如下:「經過一段忙碌的整備維護周期及一些與家人和朋友必要的假期,吉米.卡特號與水下研究與發展分遣隊進行了測試,並啟程前往第二輪任務周期的最後部署,並在大量不利條件、極大壓力、沒有外界支援情況下,獨自完成了任務,這部署延續了吉米.卡特號追求重大國家安全目標的優良傳統」。這些敘述來自於7月艦上人員的餐會以及三個月後的萬聖結派對。這項「7號任務」使吉米卡特號取得總統單位表彰(Presidential
Unit Citation,PUC),這種高級榮譽只有在極度困難及危險狀況下完成任務才能獲得。依照吉米.卡特號所屬的水下研究與發展分遣隊(Detachment
Undersea Research and Development,DUR&D)關於「7號任務」的敘述,吉米.卡特號獨自完成這項對於美國國家安全極端重要,且挑戰極為艱鉅的單一潛艦任務,期間沒有發生任何意外。
2021年10月康乃狄克號碰撞意外 在2021年5月,美國海軍宣部,康乃狄克號離開華盛頓州的卡薩帕-布雷默頓 (Kitsap-Bremerton)海軍基地,展開一輪太平洋部署,期間至少分別在7月跟8月停靠日本的美國海軍基地。 2021年10月7日,美國海軍發佈聲明,海狼級的康乃狄克號(USS Connecticut SSN-22)於10月2日在印太地區水域的公海航行時,在水下碰撞到不明物體。聲明中表示,康乃狄克號維持在安全與穩定的狀態,核子推進系統完全正常運作,此時正在評估損害情況,確保人員安全是第一優先,而美國海軍並未要求協助。依照稍後美國海軍研究所(USNI)新聞透露,美國國防官員透露,碰撞地點在南中國海,艦上11名人員在碰撞時輕、中度受傷;美軍時報(Military Times)報導稱,這些傷情多為撞擊、瘀血、撕裂傷之類,其中兩人傷勢相對較重(中度),但並沒有人需要立刻後送。碰撞發生後,康乃狄克號隨即返航關島,在星期六(10月9日)抵達。在事發初期階段,美國海軍官員透露,還沒有跡象顯示康乃狄克號在水下撞到的物體,是否為另一艘潛艦或船隻。美軍時報報導引述一位不具名的官員稱,碰撞發生的水域的海圖,並沒有顯示該處海底地形有隆起。依照稍後在關島的消息,有人目擊康乃狄克號的艦首聲納罩受損。稍後有兩個美國海軍內部消息指出,康迺迪克號撞擊時艦首受損,受損部位涵蓋壓載水艙。 由於負責維修美國海軍核子動力船艦/潛艦的四家美國公營造船廠工作早已飽和,連計畫排程內的維修工作都已經很難跟上進度,康迺迪克號的意外受損造成不少困擾。在2021年10月28日,美國海軍主管研究、發展、採辦(Navy for research, development and acquisition)的代理助理部長Jay Stefany在眾議院武裝部隊委員會整備子委員會(House Armed Services Committee readiness subcommittee)的聽證會表示,如果康迺迪克號最後需要由公營船廠整修(關島沒有乾塢可以進行維修),肯定會打亂這些公營船廠的期程。對於公營船廠而言,核子動力航空母艦以及彈道飛彈潛艦的優先度高於核子動力攻擊潛艦;不過Jay Stefany表示,因為海狼級是美國最安靜的核能攻擊潛艦,都部署於執行特殊機敏任務的開發群(Devgroup 5或Devgroup 12),價值較高且數量稀少(只有三艘),因此有可能可以優先處理康迺迪克號。
2021年10月20日衛星照片拍攝的關島海軍基地,應為康迺迪克號潛艦 (根據艦尾的噴泵推進器)。此照片解析度有限,研判之後發現 康迺迪克號艦首聲納外罩整個脫落,艦首處的白色應該是聲納陣列。 在2021年11月1日,美國海軍研究所(USNI)新聞透露,康迺迪克號撞擊事故的初步調查報告在前一週出爐,並且提交第七艦隊指揮官Karl Thomas中將審核;USNI引述兩位美國海軍知情官員以及一位議員透露,事故報告判定,康迺迪克號在10月2日於印太地區國際水域作業時,撞到海圖上沒有標示海底山脈;撞擊導致潛艦前部水櫃受損,使康迺迪克號結束任務並花費一星期時間自力渡航到關島。 此時,康迺迪克號正在關島本地由蘭德號(USS Emory S. Land AS-39)潛艦支援艦,以及從普吉灣海軍造船廠(Puget Sound Naval Shipyard)和美國海上系統司令部(Naval Sea Systems Command)的人員進行初步修理,使潛艦能安全地從關島渡航返回美國本土進行徹底修復。以往關島有兩個浮動乾塢,包括一個長295公尺、寬53公尺的大型浮動乾塢以及一個長189公尺、寬37公尺的中型浮動乾塢,然而這兩個乾塢由於年久失修,到2016年就已經撤除。先前2005年1月8日,洛杉磯級核能攻擊潛艦舊金山號(USS San Francisco SSN-711)在關島以南全速潛航時撞上海底山脈,艦首與水櫃嚴重受損,當時關島基地還有浮動乾塢可用,所以花了8個月時間將舊金山號艦首維修到可航行狀態,然後該艦才返回美國本土進行完整的整修。然而此次康迺狄克號事故,美國海軍在關島只能靠蘭德號潛艦救難艦對康迺狄克號進行應急處理,隨後康迺狄克號必須在移除艦首聲納外罩但沒有替代品的情況下,以「平頭」的形狀全程浮航返回美國本土,十分辛苦。 在2021年11月4日,美國海軍宣佈,康乃狄克號會回到母港──華盛頓州的布雷默頓(Bremerton,Washington)的奇薩普海軍基地(Kitsap Naval Base)進行整修。2021年11月18日當地時間晚間,康乃狄克號以自身動力從關島啟航。在12月15日,美國海軍發言人向美國海軍新聞社證實,康乃狄克號從關島啟航後經過一個月的水面浮航,在12月12日(週日)抵達聖地牙哥,經過短暫整備後在12月15日從聖地牙哥啟航,前往華盛頓的布雷默頓(普吉灣海軍造船廠)進行維修。
(上與下)在2021年12月12日上午8時左右,從關島返航的康乃狄克號通 過聖地牙哥水域。照片可以看出康乃狄克號聲納罩被移除。
(上與下)2021年12月15日,康乃狄克號從聖地牙哥啟航前往巴爾的摩。 照片顯示康乃狄克號艦首聲納罩被整個拆除(在關島的緊急維修時拆除) ,露出水密隔艙外壁。
在2021年11月4日,美國海軍第七艦隊司令Karl Thomas中將簽署了懲處命令,將康乃狄克號的指揮官(CO)Cameron Aljilani中校、執行官(XO)Patrick Cashin、聲納技術主管(Master Chief Sonar Technician)Cory Rodgers解職,表示「對其領導失去信心」;依照第七艦隊的聲明,Karl Thomas中將判定,如果事先有明確的判斷、謹慎的決策,以及在制訂航行計畫、航行值班以及風險管理時,都能遵守必要程序,這個意外本來可以避免。依照外界消息,康乃狄克號事故不僅涉及該艦人員疏失,背後還反應許多系統性問題。 在2021年11月17日,美國海軍潛艦部隊(Naval Submarine Forces)指揮官威廉.哈德斯頓中將(Vice Adm. William Houston)在美國海軍潛艦聯盟年會(Naval Submarine League)透露,當天他與太平洋艦隊潛艦指揮官傑佛瑞.加布朗少將(Rear Adm. Jeffrey Jablon)聯合發佈命令,要求所有部署在太平洋區域的核能攻擊潛艦暫時退出作業,接受航行安全強化訓練,包括康乃狄克號意外事故細節。Paul Macapagal上校表示,美國海軍潛艦部隊所有潛艦都展開航行安全訓練,避免康乃狄克號的事故重演。威廉.哈德斯頓中將表示,海軍航行安全委員會還沒完成所有調查報告,但他們「已經知道得夠多了」;在康乃狄克號事件發生後,相關信息立刻被分享到美國海軍潛艦部隊,而此時許多細節已經釐清,接下來就立刻檢討美國潛艦部隊現有操作程序以及執行狀況。 康乃狄克號的修復 在2021年12月初,參議院通過2022財年的國防預算授權法案(NDAA FY2022)中,加入了1000萬美元預算來購置一個新的聲納外罩,此外還有4000萬美元的「緊急修理費用」(emergent repairs),這些可能是用來修復康乃狄克號(這些可能只是初始費用,聲納外罩加上聲納系統的總費用遠不只於此)。 在2022年3月3日,美國海軍時報(The Navy Time)報導,美國海軍太平洋潛艦司令部(SUBPAC)發言人Cynthia Fields中校表示,康乃狄克號在2022年2月8日進入普雷默頓的普吉灣海軍造船廠與中繼維修設施(Puget Sound Naval Shipyard & Intermediate Maintenance Facility,PSNS & IMF)的第五號乾塢(Dry Dock 5)並展開檢查評估程序,評估結果顯示康乃狄克號的耐壓殼以及核子推進系統在碰撞中都沒有受損;然而,Cynthia Fields中校並沒有透露預估康乃狄克號能夠重回現役的時間。一位不具名的業界人士表示,更換康乃狄克號受損的艦首聲納外罩是一大難題,因為海狼級潛艦當年只見造三艘,沒有現成的備用組件;這意味著美國海軍必須專門為康乃狄克號訂製一個聲納外罩,而且必須找到還有多餘產能的廠商──此時美國海軍潛艦產業鏈所有供應商,都為建造維吉尼亞級核能攻擊潛艦以及哥倫比亞級彈道飛彈潛艦而忙得不可開交,無暇為康乃狄克號製作一個新聲納罩。 在2022年7月1日,美國海軍海上系統司令部(NAVSEA)回覆美國海軍研究所新聞(USNI News)關於康乃狄克號修復的問題時透露,康乃狄克號碰撞的損害,可望在原先已經排定、2023年2月展開的延伸進塢選擇性受限制可獲得性(Extended Docking Selected Restricted Availability,EDSRA)維修工程中修復,但還不確定是否需要進一步延長塢期來完成所有工程,且維修成本還沒完全估算出來。 在2023年1月27日美國海軍宣佈暫時關閉四座用來維修潛艦的乾塢,因為評估認為發生大地震時在內維修的潛艦與人員安全堪慮;這個插曲讓康乃狄克號的維修工作又遭到進一步推遲。這四座乾塢中,三座位於普吉灣海軍船廠,第四座則是位於班加(Bangor)潛艦基地的三叉戟彈道飛彈整修設施(Trident Refit Facility)。這些乾塢暫時關閉,導致美國海軍已經吃緊的潛艦維修工作更雪上加霜,也延誤了康乃狄克號進塢維修的期程。在2023年6月14日,朋博社(Bloomberg)報導,由於美國海軍四家公營船廠還有許多積壓的核子潛艦維修工作,康乃狄克號估計最快也要等到2026年初才能重回現役;而修復康乃狄克號受損的艦首聲納罩以及尾舵的費用估計為8000萬美元。
2023年7月12日,康乃狄克號進入普吉灣海軍造船廠第5號乾塢展開維修。 康乃狄克號的維修工作排定在普吉灣海軍造船廠的第5號乾塢,這座乾塢從2023年3月29日展開前述的緊急補強工程,到7月時已經完成。在2023年7月12日,康乃狄克號終於進入普吉灣海軍船廠第5號乾塢,展開EDSRA塢修工程,比原訂進塢時間(2023年2月)晚了五個月。 在2023年7月底,Naval News詢問海上系統司令部(NAVSEA)關於康乃狄克號目前的維修狀況,稍後海上系統司令部回覆表示,康乃狄克號此時正在普吉灣海軍造船廠與中繼維修設施(PSNS & IMF)的第五號乾塢進行EDSRA維修工程,EDSRA工程在7月12日展開,預計康乃狄克號能在2026年初重回現役,海軍估計維修費用約為8000萬美元。NAVSEA在回覆中表示,PSNS & IMF在2022年的評估顯示,康乃狄克號能完全修復,且各項作業不受限制;損害部位包括艦首以及下方垂直尾舵,艦上推進系統完全沒有受到影響。 在2025財年美國海軍預算中,要求預算(總額不明)來購買一個海狼級的艦首聲納護罩,似乎是預防未來類似意外再度發生時的備料。依照2025年7月公布的美國海軍2026財年預算計畫,記載康乃狄克號的維修工作需在2026年底完成。 而海狼號預定從2026年4月進入普吉灣海軍造船廠(Puget Sound Naval Shipyard)進行延伸維修週期,預定2029年6月完成;因此,在康乃狄克號回到艦隊之前,美國海軍將會出現只有一艘海狼級(吉米卡特號)能用的時期。
康乃狄克號事故最終調查報告
在2022年5月23日,美國海軍公布康乃狄克號事故的最終調查報告。此時公布的最終報告中,許多部分都因為保密而塗黑,不過公開的部分已經大致提供了整個意外的完整前因後果。此報告結論稱,康乃狄克號的意外是由於許多個別錯誤累積而成,且在制訂航行計畫、航行值班、風險管理三方面有所遺漏、遠低於美國海軍該有的水平;報告認為,如果在決策層面謹慎而行、在這三個領域遵照所有程序執行,則此項意外完全可以避免。 在2021年3月上旬,公開信息報導康乃狄克號艦上飽受床蟲(Bed bugs)之苦,情況已經持續一年,對於艦上人員的健康、士氣已經造成嚴重打擊。在2021年5月部署之前的整備跟維護作業階段,床蟲問題已經獲得解決。 1.指揮官的領導統御問題 依照報告,康乃狄克號此次太平洋部署在2021年5月展開,於5月27日從華盛頓州奇薩普.布雷莫頓(Kitsap-Bremerton, Washington State)母港啟航。然而報告指出,在準備此次部署期間,康乃狄克號指揮官(CO)Cameron Aljilani中校就已經因為領導統御問題,遭到第五潛艦開發群指揮部(Commander, Submarine Development Squadron Five,CSDS-5,下轄三艘海狼級潛艦)面談輔導。Aljilani在2019年被任命為康乃狄克號指揮官;在2020年7月10日,CSDS-5對Aljilani中校發出表現評估信函(Letter of Performance)並對其進行輔導,信中指出Aljilani中校「監督不合宜」、「(發現問題時)沒有採取行動問責」、以及「自我評估作業流於形式」(inadequate supervisory oversight, ineffective accountability practices, and superficial self-assessment)。 然而,Aljilani中校經過此次督導之後,並沒有依照任何建議來改進;於是在2021年2月16日,CSDS-5又對Aljilani中校發出指導信函(Letter of Instruction),其中指出Aljilani中校缺乏改進、不願意接受回饋,並對於該艦指揮階層下達明確的改善指示。 2.部署前的擦撞碼頭意外 在2021年4月14日、展開部署之前,康乃狄克號在聖地牙哥的勞馬點(Point Loma)海軍基地操作時擦撞碼頭,於是準備部署的訓練工作暫停,進行安全性停工(safety stand-down),針對危險辨識、風險管理、形式與溝通(formality and communications)、基本值更等進行加強訓練。 CSDS-5隨後調查此項意外,並在康乃狄克號出發前往太平洋展開部署之前完成;這項調查認為,此次擦撞碼頭意外本來是可以避免的,並建議對五名相關軍官(CO、XO、NAV、OOD、ANAV)施予行政或紀律懲處(2021年10月撞擊事故發生後,這五名軍官除了OOD之外,其餘四人都再次面臨懲處)。雖然發生這件意外,但康乃狄克號仍在5月14日完成了遠程部署前評估作業(Pre-Overseas Movement Evaluation ahead of the deployment,POMEVAL)並獲得CSDS-5簽字批准。 在2021年5月20日,CSDS-5公布了康乃狄克號擦撞碼頭意外的調查報告,其中指出基於調查過程中發現的各項事證與經過,認為康乃狄克號艦上人員的導航與計畫執行水平衰退,船藝欠佳,而且指揮階層的領導統御明顯有問題;整體而言,這艘船艦的人員呈現的是表現異常(anomalous performance),並不是系統性失效(systematic failure)。在5月27日,康乃狄克號啟航展開部署。 不過,太平洋艦隊主管潛艦活動的第74特遣群(Task Force 74 ,CTF-74)在調查報告中表示,康乃狄克號抵達太平洋區之前,CSDS-5並沒有告知他們關於康乃狄克號撞擊碼頭意外以及調查作業的信息。 3.部署期間:中期考核作業的跡象、前部測深儀故障 在部署中期的考核作業(mid-deployment check ride)中(CSDS-5稽核人員登艦來考核潛艦人員的操作狀況。因此,康乃狄克號進行各項操作模擬,包含武器操作、航行控制、消防損管等;其中,潛航安全包括模擬使用艦底測深儀(bottom sounder,前、後各一部)探測深度時,發生失去聲響(loss of sounding)、黃色聲響(yellow sounding)、紅色聲響(red sounding)等異常狀況。其中,「失去聲響」代表測深儀無法接收到回波信號;「黃色聲響」是指潛艦在最大授權操作深度(maximum authorized depth)時,通過指揮官安全操作文件(Commanding Officer Safe Operating Envelope,COSOE,記載艦上人員平時可以執行的各項操作界線,如果要超出界線則需指揮官授權)中所記載的最淺水域;而「紅色聲響」則是潛艦深度低於COSOE定義的絕對最低可接受安全深度(absolute minimum acceptable safe dept),此時艦上人員必須採取立即行動來避免潛艦碰撞海底。依照CSDS-5稽核人員記載,康乃狄克號的人員帳面上都瞭解這些規則,但在考核作業中系統發出模擬前述異常狀況的聲響時,操作人員卻沒有反應,沒有照程序去檢查原因以及採取相應措施。 依照報告公開內容,康乃狄克號在部署期間,前部艦底測深儀(forward bottom sounder)就開始出現故障,所以只剩後部後底部測深儀(aft bottom sounder)正常工作;在展開部署時,兩部艦底測深儀都能正長工作,然而到前述的部署中期考核作業時,前部測深儀就在無法工作的狀態。依照報告備註,在部署期間,艦上人員曾在艦隊的中繼維修活動(Intermediate Maintenance Activity)的協助下,對前底部測深儀進行維修。而指揮官Aljilani在航行中,至少一次通知CTF-74,希望能在HUMEVAC航行(就是發生撞擊事故的航行)期間更換故障裝備,或者更改原訂勤務計畫返回關島來修理。 4.未照程序擬定的「臨時航行計畫」 10月2日事故發生當天,康乃狄克號進行一趟人道救援撤離(Humanitarian Evacuation ,HUMEVAC)渡航,朝向沖繩航行。這次HUMEVAC航行可能是出於某種原因需要將某些人員迅速送到岸上,例如非緊急醫療需求或家庭緊急事故。 依照正常程序,康乃狄克號人員必須基於航行管理系統(Voyage Management System,VMS)中已經驗證實安全的資料來制訂航行計畫(Navigation Plan,NAVPLAN),通過必要的評估驗證程序,才能付諸執行;然而,該艦人員卻在跳過了一些必要的安全檢查以及系統內建的驗證程序,制訂了一個臨時航路計畫(temporary route plan)。 調查發現,康乃狄克號人員制訂的臨時航行計畫,並沒有照規定充分標示航路上的海圖。在潛艦預定的航道上,有兩處水下危險(underwater danger/underwater hazard)沒有正確標示,還有五處應該標示成導航風險區(navigation hazards)的未上色導航區域(discolored water)也沒有標示。這些風險區原本就在系統儲存的海圖上,但助理導航官(ANAV)值班司務長(Quartermaster of the Watch,QMOW)準備航行計畫時,需要將海圖中帶入這些風險區資料,才會出現在航行管理系統(VMS)的航行計畫海圖上。在調查中,指揮官Aljilani中校表示當時他口頭同意臨時航路,他預期下屬制訂臨時航行計畫時,已經繞開了海圖標示的所有風險區域;但他根本不知道下屬一開始就沒有在海圖上確實標示所有的風險區,更不知道後來ANAV逕自取消海途中「不得靠近」區域(見下文)。 從康乃狄克號到沖繩的路上,包括機密的MATT海底探勘數位資料涵蓋的區域(MATT通常是潛艦制訂航行計畫時的第一選項),但也有超過MATT探勘範圍的資料。Aljilani中校認為,此趟航行全程都在MATT資料涵蓋的範圍內,而沒有充分利用艦上航行管理系統(VMS)的資料。此外,艦上助理導航軍官(assistant navigator,ANAV)知道VMS裡有一些「清掃區域」(swept areas)的資料,但他也沒有利用這些資料來準備海圖。 依照調查報告;在制訂臨時航行計畫的會議中,參與的軍官討論出最適當的航速應為16節(就是測深儀以正常效能工作的上限);但展開航行之後,艦上人員卻將航速提高為24節,這可能就是後來撞擊發生時的速度。一旦潛艦航速超過16節,底部測深儀的效能就會開始衰減,更何況康乃狄克號此時只剩後部測深儀正常工作。依照美國海軍技術參考刊物(The Navy Technical Reference Publication)3-21.41.15指出,在24節航速下,潛艦底部測深儀的工作距離通常最多到龍骨下方1400尋(fathom,約8400英尺),然後開始衰減。調查人員判斷,艦上的作業軍官(Operations Officer,OPS)沒有參與制訂臨時航行計畫的會議,所以不需要對航速變更負責任。 調查報告認為,艦上人員逕自使用一個未經驗證的臨時航行計畫,是後來發生意外的最主要原因。 5.事故之前的航行:測深儀無法測得信號、ANAV擅自移除「不得靠近」區域 10月2日在事故之前,在0115Z時(Zulu time,即GMT格林威治時間),值班司務長(QMOW)使用測深儀測量深度,發現失去聲響(即loss of sounding)的狀況;QMOW把結果記錄到下來,但沒有照規定採取任何對應措施如通知上級。此時,康乃狄克號只靠後部艦底測深儀測量深度。隨後在0134Z以及0200Z時,QMOW再次使用測深儀嘗試獲得康乃狄克號的實際作業深度,結果同樣是失去聲響,無法獲得探測讀數;在後續這兩次操作中,QMOW不僅沒有採取適當的對應措施,甚至沒有紀錄。在0323Z時,執行官(XO)Cashin少校到艦橋值班並成為責任指揮官(Commander Duty Officer,CDO),但QMOW並沒有告知測深儀無法獲得深度資料的狀況。 在0420GMT時,助理導航官(ANAV)命令QMOW移除潛艦航路計畫的紅色「不得靠近」(stay out)區域,但沒有說明理由;而指揮官在調查中也不知道這件事。在事後調查時,ANAV表示當時他「深信」當時潛艦的聲響探測結果良好,深度比CTF-74提供的海圖信息還高(但實際上應該是「失去聲響」的異常狀況)。 在0500Z時,艦上指揮官(CO)、執行官(XO)、艦橋值班軍官(COB)、導航軍官(NAV)、作業軍官(OPS)、安全軍官(OSO)、助理導航軍官(ANAV)以及聲納軍官(ACINT SONAR Rider)理當進行晨間例行會議,但實際上CO通知OSO不需要更新信息,所以實際上沒有開會;於是,包括QM從0115Z起回聲探測儀就無法得到深度,以及ANAV擅自移除海途中紅色Stay Out區域等信息,都沒有其他人知曉。 0540Z時,QMOW(已經換班)向OOD報告,測深儀探測資料與臨時航行計畫中的海圖不一致,深度記錄儀顯示此現象已經有30分鐘;這種現象可能是海圖資料不週全,或者潛艦有偏航跡象。然而,QM跟OOD都沒有採取任何對應行動。 在0616Z時,ANAV建議將測深儀(fathometer)切換切換到一種非保密操作模式(unsecured mode)來取得更精確的深度資料,但會違反當時康乃狄克號實施信號發射控制(emission control),需要指揮官授權才能使用;報告公開內容並沒有說明,最後值班團隊是否有這麼做。甲板軍官(OOD)曾擔心,海底實際深度低於迴聲探測結果(shallower-than-expected soundings);然而,最終OOD並沒有採取任何措施,例如降低航速。 在撞擊發生前夕的0618Z時,聲納值班(Sonar Supervisor)在艦首方向獲得一個接觸軌跡,系統判斷成海底生物(biologics);聲納人員表示,除此之外並無其他接觸。事後調查認為,這應該是康乃狄克號已經迫近海底,潛艦自身輻射的聲響被海底地形反彈而被聲納聽到。報告沒有明確記載撞擊發生的時間,但記載在0618Z時OOD下令潛艦上浮,顯然是緊接在撞擊之後;由以上推測,撞擊就是發生在0618Z。 6.撞擊之後的情況 依照報告,撞擊發生後,康乃狄克號值班團隊一度陷入混亂,OOD也在撞擊下受了較重的傷勢。OOD兩次對潛航值更官(The Diving Officer of the Watch,DOOW)下達命令,第一次是深度改為160英尺,第二個命令是降低航速來避免潛艦上揚過快;然而在碰撞的巨大聲響或驚駭之下,DOOW沒有聽到(或意識到)這兩個命令。DOOW在撞擊之後,本能地將艦尾水平舵舵角向上打滿,使潛艦向上(由於原本康乃狄克號是在高速潛航,首上舵處於縮回狀態,因此只有艦尾舵面在使用)。撞擊之後,數位電磁記錄器(Digital Electromagnetic Log,EDML)失效,聲納系統則回報艦首球型陣列聲納工作嚴重衰退(degradation),航速儀也完全失效。 撞擊之後,由於航速未減且艦尾水平舵往上打滿等關係,康乃狄克號以前部上揚31度的姿態衝向水面;在0619Z時,DOOW宣布潛艦正在衝出水面。值班指揮官(COW)啟動碰船警報,並準備對水櫃進行緊急吹除。接著,OOD宣布停俥(All Stop),避免潛艦失控地高速衝出水面。CO進入指揮中心,接替指揮。 0620Z時左右,康乃狄克號衝出水面。隨後,該艦在潛望鏡深度伸起二號潛望鏡監看四周,並使用GPS更新船位,發現該船偏離預定航道,船位在他們先前預估的西北方距離1200碼處。由於上浮過程沒有正確排除水櫃,康乃狄克號實際上仍然是負浮力,因此衝出水面之後又開始下沈;由於先前已經下令停俥,一時間也沒辦法透過前進的流速為水平舵製造舵效應讓潛艦向上。當潛艦掉深到36英尺時,CO下令啟動水櫃的馬達(trim pump motor)希望排除水櫃來揮副浮力,但一時之間馬達無法正常工作;事後調查發現當時艦上壓載平衡系統(Trim System)發生故障,抽不到水。 到0624Z時,康乃狄克號掉深到超過70英尺;在失去深度控制且推進仍未恢復的情況下,COW下令使用高壓空氣對所有主壓載水櫃進行緊急爆破(emergency blow)吹除;隨後康乃狄克號下沈速率減緩,不過還是繼續下沈,深度超過74英尺。輪機室直更人員在機艙裡發現有油灑出,遂宣告推進系統潤滑油系(Propulsion Lube Oil,PLO)洩漏,代表推進系統不能使用,無法利用前進與打舵來讓潛艦向上,這對於仍在持續掉深的潛艦是個壞消息;不過隨後機艙人員證實這是虛驚一場,實際上是潛艦後部廚房一桶五加侖食用油在撞擊時掉落摔破,把油灑得到處都是。確認PLO無損後,輪機人員立刻宣佈潛艦恢復推進,並水平舵上仰。於是康乃狄克號停止掉深,以30度仰角向上保持前進。CO下令準備低壓爆破(low-pressure blow),再次吹除主水櫃;相較於緊急爆破,低壓爆破使用的壓縮空氣氣壓較低。 在0628Z時回,靠著上仰姿態用推進力抵抗下沈負浮力,康乃狄克號接近水面,並升起高傳輸率無線電通信桅杆。在0630Z時,艦上壓載平衡系統(Trim System)恢復工作,開始配平各壓載艙,排除了至少10萬磅的艙水。在0640Z時,艦上人員以OPREP-3緊急事件頻道(語音)聯絡上CTF-74回報這次事故。在0641Z,CO下令執行緊急低壓爆破,吹除所有主水櫃。排除水櫃的作業進行到0710Z時,2號調節馬達因為過度運轉,控制器發紅並冒煙起火;艦上人員立刻將馬達的電源隔離關閉,並使用滅火器滅火。之後,康乃狄克號的人員控制住局勢,並進行損害評估等;而CTF-74也下令該艦返回關島。 撞擊之後,康乃狄克號的艦首聲納罩仍然連在艦體上(至少部分連結),但在返回關島途中完全脫落,沉入海中。在將近一週後,康乃狄克號在10月8日返回關島。康乃狄克號在關島基地進行水下檢查作業時,發現前部的主壓載艙(MBT)1A與1B都發現撞擊海底留下的碎石。 此撞擊導致艦上11名人員受傷;其中兩人傷勢較重,維護材料管理主管(Maintenance Material Management Coordinator,3MC)撞到頭部,遭受頭皮撕裂傷並出現腦震盪症狀,而OOD遭受右間肩胛骨斷裂。其他9名傷員都是在撞擊過程中受到輕傷。另外,還有7名人員因撞擊以及後續事件的驚嚇,需要接受心理輔導。 7.小結 報告指出,康乃狄克號以24節的航速撞到海底,本來可能發生更嚴重的後果,甚至不無可能全船喪失;幸好艦上人員還是設法控制情況,使船艦安全上浮,並控制裝備受損以及人員傷情。 此報告結論,打從康乃狄克號的人員制訂臨時航行計畫,風險就已經產生了;而後續一連串疏忽與錯誤,導致此次航行變得越來越危險,最後終於出事。調查人員也在報告中評論,日復一日的航行作業後,艦上人員的值勤態度鬆懈了。整體而言,此次康乃狄克號部署,在遠程部署前評估作業(POMEVAL)以及部署中期評估都合格,但隨後到部署末期,艦上人員並沒有繼續維持這樣的水平。 調查指出,康乃狄克號出事之前,前部艦底測深儀並沒有正常工作;在當時該艦的24節的航速下,使用後部艦底測深儀,只能提前幾秒鐘預警。而在得知艦底測深儀狀況惡化時,指揮官應該下達暫時命令(Temporary Standing Order,TSO),指引艦上人員在前部艦底測深儀無法進行深度工作模式(DEEP modes)時,該如何安全作業。以當時的情況,最初航行計畫的16節是比較適當的渡航速率。 此項報告也建議海上系統司令部改進底部測深儀的數位演算法(bottom sounder digital display coasting algorithm);在這次擱淺發生時,即便深度計顯示龍骨下方的海底深度逐漸變淺,卻沒有發出警告(數位記錄顯示當時測深結果快速變淺)。 調查報告認為,船員在發生撞擊後的立即反應,避免了可能的全船喪失。不過也有專家認為,在上浮過程中,艦上人員直接控制潛艦直升水面而沒有檢查,其實十分危險,可能撞上與剛好路過的水面船隻,釀成更大的災難。此外,上浮過程沒有充分使用深度控制或良好地管理配平與排水系統,使潛艦面臨失去深度控制的風險。 康乃狄克號上的指揮氛圍不佳、勤務紀律鬆懈等狀況,除了該艦指揮階層本身問題之外,近年來美國海軍艦隊勤務強度過高、使船員身心俱疲,降低了士氣以及值勤水平,可能也有間接影響。依照2022年5月24日海軍時報(Naval Time)報導,一位分派到海狼級潛艦的水兵表示,潛艦部隊人員長期感覺到被上級忽視,上級只是急著不斷地指派軍事任務,船員對於長期不停在航早已感到疲憊。另外,美國海軍攻擊潛艦部隊人員如被分配到諸如開發群(主要執行特殊或高風險任務),尤其是配備三艘全艦隊性能最好的海狼級潛艦的CSDS-5,多半被認為是菁英人員;而這樣的自滿情緒有可能反而導致忽視一些基本而繁瑣的航行安全程序。 2022年10月底美國海軍潛艦聯盟(Naval Submarine League)年會上,威廉.赫斯頓中將(Vice Adm. William Houston)透露,康乃狄克號意外事故報告提出的28項主要建議中,已有27項執行完成,最後一項在2023年春季完成。這些建議包括新的程序、額外訓練、部署新技術來強化潛艦導航能力等。威廉.赫斯頓中將表示,康乃狄克號事故原本應該是可避免的,艦上人員並沒有依照程序執行航行計畫。所以,美國潛艦部隊新增了額外的程序與訓練,使潛艦人員瞭解這些程序的原理與重要性。除了訓練層面外,潛艦部隊軍官都已經重新接受訓練課程,資淺軍官現在都要接受額外的航行操作訓練,資潛水兵也會接受更多導航訓練,使他們能正確操作艦上的導航設備。在培訓未來潛艦指揮官的課程中,會更強調在航行操作中如何正確使用導航設備來避免意外,而不是僅僅提醒指揮官要避免水下障礙物。而在改善導航設備技術方面,威廉.赫斯頓中將表示,美國潛艦部隊已經迅速地改進導航電腦能力,能自動提前搜尋並標示電子海圖中的所有淺區,新的導航系統會在兩個月內部署。
(1) (2)
|












