NEMESIS、LEED船外有源誘餌系統

美國海軍研究辦公室(ORN)開發的網狀船外小型主動誘餌(NOMAD)在2010年代末期在
LCS濱海戰鬥船艦科羅納多號(USS Coronado LCS-11)上進行測試。NOMAD以同軸反轉旋翼推進,
其上搭載電子戰等籌載。
|
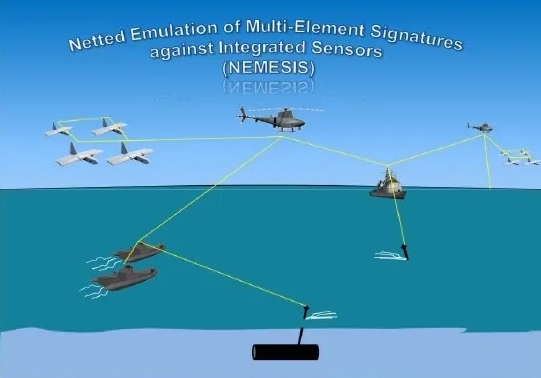
「多元素信號針對集成傳感器的網絡化模擬」(NEMESIS) 在2013年4月公布的2014財年美國海軍的預算申請中,在研究發展測試評( Research, Development, Test & Evaluation RDT&E)估預算項目裡首次出現「多元素信號針對集成傳感器的網絡化模擬」(Emulation of Multi-Element Signature against Integrated Sensors,NEMESIS)項目。在預算文件中,海軍形容NEMESIS是一種「由系統構築的系統」(System of Systems,SoS),能協調各種電子戰(EW)資源,同時對抗敵方各個監視與目標標定傳感器。NEMESIS在戰場空間裡對抗敵方許多傳感器、保護己方平台,創造無縫的跨領域協同反制措施(seamless cross-domain countermeasure coordination),並允許快速的先進技術與能力插入(advanced technology/capability insertion)來對抗新興的威脅。 2014財年預算中電磁系統應用研究(Electromagnetic Systems Applied Research)的RDT&E項目中記載,NEMESIS能在敵方多重監視與感測器上產生類似一個真實海上艦隊的假象;該文件描述NEMESIS具備可重構且模組化的電子戰籌載、分佈式誘餌與干擾器群集(Distributed Decoy and Jammer Swarms,DDJS)、有效的聲學反制(acoustic countermeasures)、多重輸入/多重輸出傳感器與反制措施(Multiple Input/Multiple Output Sensor/CM,MIMO S/CM)來對多個水上與水下感測器產生假目標。
2014年左右的NEMESIS概念圖,攜帶籌載的無人機跟有人水面船艦、 MQ-8B無人直昇機、水面無人艇等進行聯網作業。
在2013年4月9日,美國海軍海軍研究辦公室(Office of Naval Research,ONR)的破壞性技術(Disruptive
Technologies)項目主管鮑伯.史密斯(Bob Smith)在國家國防工業協會(National Defense Industrial
Association)第15屆科學與工程科技年度論壇(15th Annual Science and Engineering Technology
Conference)的演說中提到幾項創新海軍原型(Innovative Navy
pPrototype,INP),其中一張簡報提到NEMESIS項目的基本概念(細節保密),其中提到NEMESIS主要是用來對抗敵方分佈式感測系統,用於混淆、欺騙(spoof)敵方的監視系統。ONR也透露,NEMESIS著眼於傳統電子戰系統的弱點與目標標定系統,並且允許快速的先進技術/能力插入來因應新型態威脅。依照ONR這場演說內容,NEMESIS包括多種模組化與可重構電子戰籌載,包括幾個基於ONR的科學技術與未來海軍能立(Science
& Technology and Future Naval
Capabilities)項目的誘餌、無人空中與水面平台。NEMESIS會結合以下功能性與能力:Code
31定義的資訊、密碼、頻譜優勢(Information, Cyber and Spectrum Superiority);Code
33任務、能力、固著、可存活海軍平台(Mission Capable, Persistent and Survivable Naval
Platforms);Code 35航空、武力投射與整合防禦(Aviation, Force Projection and Integrated
Defense)。 在2017年RDT&E項目說明文件提到,2015年2月在ONR主導下,海軍作戰發展中心(Navy Warfare Development Center,NWDC)進行了NEMESIS兵棋推演,主要是蒐集來自艦隊的回饋,納入關於NEMESIS的ONR INP項目的需求與設計之中,最終將依此建構海軍正式的原型系統並部署於艦隊。2017年海軍項目指引(2017 Navy Program Guide)提到,專用於NEMESIS的硬體在2016年被發展出來,在2017至2018財年會在系統整合層級上進行飛行與海上測試,在2018年底進行完整能力展示。參與NEMESIS系統開發的單位包括喬治亞技術研究機構(Georgia Tech Research Institute)、約翰.霍普金斯應用物理實驗室(Johns Hopkins’ Applied Physics Lab)、麻省理工學院(Massachusetts Institute of Technology,MIT)的林肯實驗室(Lincoln Lab)、海軍水下作戰中心(Naval Undersea Warfare Center)、海軍研究辦公室(ONR)、太空與海軍作戰系統司令部(Space and Naval Warfare Systems Command,日後改成海軍資訊作戰系統司令部,Naval Information Warfare Systems Command)等。
在2018與2019財年預算中,記載NEMESIS消耗性誘餌(expendable
decoys)以及原型系統硬體將會完成並進行場域測試,並記載這些誘餌會在艦隊實驗活動中進行展示,此外也會在聚焦場域以及實驗是測試中進行展示。 這邊CSBA論文列出許多目前已經使用、可能整合到NEMESIS的無人機,包括特種部隊使用的彈簧刀(Switchblade)遊蕩彈藥(loitering munitions)、海軍低成本無人機群集科技(Low-Cost UAV Swarming Technology,LOCUST)使用的Coyote小型UAV、洛馬集團(Lockheed Martin)的Fire Shadow遊蕩彈藥等;而美國海軍也發展了類似彈簧刀、可由潛艦施放的Blackwing小型UAV。NEMESIS概念的無人機群集最終將整合到現有的傳統海軍電子作戰系統中,例如AN/SLQ-32 SEWIP;而海軍的EA-18G咆哮者載人電子戰機也可能成為NEMESIS電子戰生態戲中的成分。 長續航力電子誘餌(LEED) 在2019年起,美國海軍開始構想一種新一代長程電子戰誘餌,基本概念是將電子戰籌安裝在低成本無人飛行載具(UAV)上。在2021年,美國海軍正式啟動長續航力電子誘餌(Long Endurance Electronic Decoy,LEED)項目。依照預算文件記載,此項目是交付一種可擴展的長程無人船外誘餌反制系統,結合了飛行載具、無線電射頻(RF)籌載等,具備模組化能力,能快速更換不同的電子戰(EW)籌載。 LEED會整合美國海軍船艦現有的AN/SLQ-32電子戰系統,並著眼於目前艦隊對於對抗反艦飛彈(ASM)威脅的能力間隙,為艦隊提供增強的電子戰協調能力,包括擴展接戰時間線以及對抗同步的飛彈攻擊。此種由無人機群集搭載電子戰籌載的概念,就包括在美國海軍於2014財年啟動的「多元素信號針對集成傳感器的網絡化模擬」(Emulation of Multi-Element Signature against Integrated Sensors,NEMESIS)項目中。 相較於現有的NULKA有源式誘餌,LEED不僅有更長的持續飛行時間,能在更遠離船艦的陣位上部署並持續作業更長的時間;此外,也擁有比NULKA更高的自主作業與網路傳輸能力;如果LEED誘餌能以自主群集(autonomous swarms)的方式在空中運作,並透過戰術網路與SEWIP等艦載電子戰系統聯合工作,就能進行更多樣而複雜的電戰欺誘措施,為敵方感測器以及導引武器的尋標器製造更難分辨的目標。 例如,懸浮在空中的LEED誘餌攜帶電磁射頻(RF)籌載來模擬船艦的各種電磁輻射信號以及雷達反射,搭載誘餌的無人機也能模擬船艦在海上的機動,一群LEED誘餌群集甚至能在敵方感測器中製造一個不存在的「幽靈艦隊」,吸引敵方的打擊火力遠離真正的我方艦隊,或者迫使敵方部署更多資產、花費更多力氣去處理、分辨這些目標的真偽。 依照預算文件,LEED項目會使用先前海軍研究辦公室(Office of Naval Research,ONR)另一項長距離空中平台(Long Endurance Airborne Platform,LEAP)項目發展的技術。 LEAD項目在2023財年申請的預算總額3808萬美元,2024財年申請3936.4萬美元預算,到2025財年申請8340萬美元預算。在美國海軍2025財年的未撥款優先清單(Unfunded Priorities List,UPL)的13個項目中,包括再增加1億1000萬美元來發展LEED。依照美國海軍2025財年預算文件中關於LEED項目的記載,在2024與2025財年中增加了設計驗證測試(Design Verification Test,DVT)、完成設計、朝向功能驗證測試(Functional Qualification Testing,FQT)的成熟化工作以準備發展測試(Developmental Testing,DT)和初期生產;而在2025財年希望完成整合反制原型(Integrated Countermeasure prototypes)、完成修改現行艦載誘餌發射系統來相容LEED的概念發展、持續推進過渡到主要能力初期採辦(major capability acquisition for initial production)的相關計畫與執行活動等等。 預算文件的敘述顯示,LEED會直接整合到船艦現有的電子戰系統中,並從船艦上發射。除了LEAD之外,美國海軍發展的船外有源電子戰系統還包括由MH-60R直昇機搭載的AN/ALQ-248先進船外電子戰系統(Advanced Off-Board Electronic Warfare,AOEW)。因此,包括AN/SQL-32(V)7 SEWIP Block 3先進艦載電子攻擊(EA)能力、由LEED誘餌以及MH-60R直昇機搭載AOEW等船外電子干擾源,甚至EA-18G咆哮者載人電子戰機,都會成為NEMESIS概念下新電子戰生態系的一環。 註:LEAP長距離空中平台/網狀船外小型主動誘餌(NOMAD) 長距離空中平台(Long
Endurance Airborne Platform,LEAP)的構想,是開發一種由航空母艦起飛的消耗性自主飛行無人飛行器(UAV),能搭載相關的電子戰(包括EA以及ESM)籌載,計畫在2026-2027年期間展開初期低量生產(LRIP)。ONR對LEAP項目的概念要求包括: 2.具備自主飛行控制能力,包括避免碰撞、在發射時接受任務指令,並從艦上控制站更新航路點,能重新定位和重新對準。 3.具有空中和海上平台意識的船舶相對導航,能夠在GPS拒止的環境下運行,並至少飛行一小時。 4.具備射頻和光電/紅外頻譜的模組化電子戰有效載荷。 5.能在海象5級的條件下運行 6.誘餌和控制站之間能進行安全雙向通信。
NOMAD進行海上測試的畫面。
|