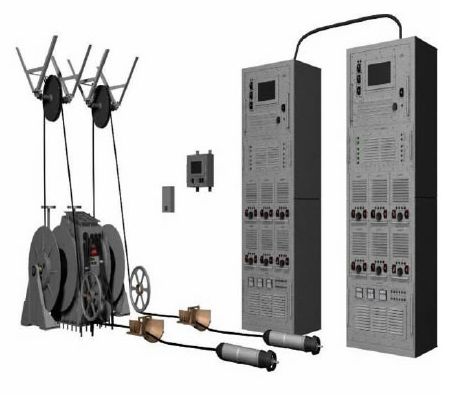
AN/SLQ-25魚雷反制系統/水面船艦魚雷防禦系統(SSTD)/AN/WSQ-11魚雷防禦系統(TDS))/AN-SLQ-61輕型拖曳魚雷反制系統(LWT)
美國海軍部署在愛荷華號戰鬥艦(USS Iowa BB-61)的AN/SLQ-25魚雷反制系統,可以看到捲收拖曳纜線的
RL-272C絞車,以及末端的拖曳體。
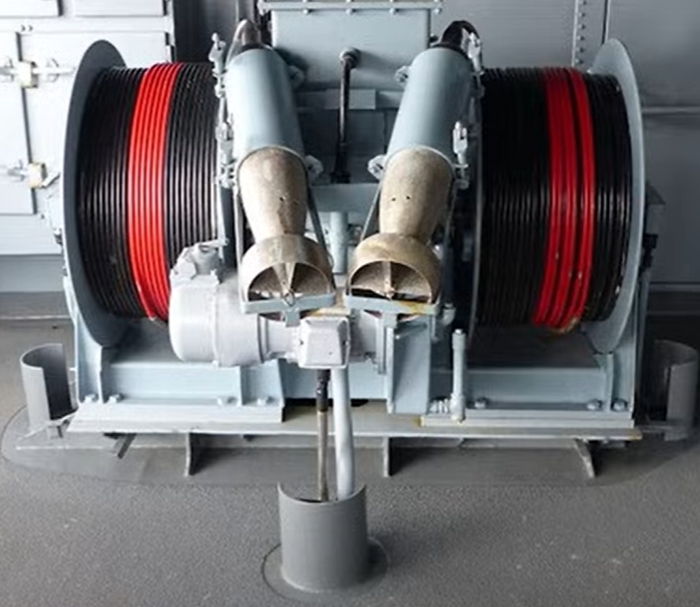
AN/SLQ-25魚雷反制系統的RL-272C雙絞車以及兩個魚雷反制拖曳體。

美國海軍人員正在施放AN/SLQ-25拖曳式魚雷反制系統,由人力將拖曳體施放入水中,拖曳體後方帶著纜線。

美國海軍柏克級飛彈驅逐艦保羅.漢米爾頓號(USS Paul Hamilton DDG-60)艦尾。右下角兩個施放口就是
兩個AN/SLQ-25拖曳反制系統的施放口,左上角艦體中線的則是AN/SQR-19拖曳陣列聲納的施放口。

英國Ultra Electronics魚雷反制系統(SSTD)的八聯裝誘餌發射器。

皇家海軍威爾斯親王號(HMS Prince of Wales R09)航空母艦的八聯裝反魚雷誘餌發射器。
攝於2025年8月31日東京國際郵輪碼頭。

船艦魚雷防禦系統(SSTD)的一個長期發展目標,就是開發出能擊毀來襲魚雷的硬殺手段,
針對這個目的而發展的CAT反制魚雷在2010年代逐漸發展成熟。此照片是2013年5月中旬
喬治.布希號(CVN-77)航空母艦首次發射測試用反制魚雷(CAT)的畫面。
CAT的體積、重量只有MK-46 324mm輕型魚雷的一半。

一張2024年的船艦魚雷硬殺系統示意圖,是將反制魚雷(CAT)與魚雷警告系統(TWS)以所屬的
目標獲得組(TAG) 、戰術控制組(TCG)、備便存放總成(RSG)整合在一起。
(主要參考資料:灣仔:全球防衛雜誌358、359:魚雷反制科技)
──by Captain Picard
|
AN/SLQ-25魚雷反制系統 隨著二次大戰期間導向魚雷(最初是被動聽音)的問世,美國海軍開始裝備T-MK-4(FXR)魚雷干擾設備,是基於英國推出的Foxer魚雷干擾器的改進型;這是一種管式噪音產生器發展自對付聲感水雷的掃雷設備,由兩個30英吋長、直徑3/4英吋、間隔1/8英吋的鋼管構成,此一裝置在水中拖曳時因兩個管子相互碰撞而產生比船隻螺旋槳推進器更大的高頻噪音源,進而欺騙來襲的導向魚雷上當。T-MK-4在航速10節時的拖曳深度為60英尺,航速20節時拖曳深度為28英尺。 在1953年,美國海軍開始裝備新的T-MK-6魚雷干擾器來取代T-MK-4。T-MK-6以電力驅動的水下噪音產生器取代T-MK-4的鋼管,其拖曳體包括一個直徑6英吋電共鳴器以及用來驅動的電動馬達,馬達輸出軸以一個滾棒驅動噪音器。當電動機帶動滾棒在共鳴器內轉動時,就會發出欺騙敵方魚雷的寬頻噪音。T-MK-6的典型使用條件是以20節航速拖曳,拖曳深度約30英尺,拖曳纜繩約長300英尺。相較於機械式的T-MK-4只要拖曳在水中就會產聲噪音,T-MK-6能直接控制啟用或停止產生噪音,因此船艦需要使用聲納時可以立刻關閉干擾器但仍保持拖曳,不用聲納時就立刻開啟,不像T-MK-4必須花費許多時間收回或重新部署。T-MK-6一直在美國海軍服役到1970年代,裝備於驅逐艦以及少部分航空母艦上。之後仍有部分盟邦使用T-MK-6。 前述的T-MK-4與T-MK-6都是在水中製造一個掩蓋船艦螺旋槳推進器的高頻噪音,這種作法有許多限制:首先,使用聲噪干擾器也會嚴重干擾本艦聲納,因此船艦在使用聲納作業時就必須關閉干擾器。其次,這些干擾器由於金屬受海水腐蝕,壽命較短,佈放也比較困難。 在1961年,美國開始測試新的AN/SLQ-25水精(Nixie)反魚雷誘餌,發射的信號產生器是在船艦上,透過拖曳電纜將信號傳遞到拖曳體進行發射;水精具有更多的模式,除了可以像T-MK-6一樣製造大量噪訊來掩蓋船艦產生的噪音,或者船艦的不同聲響如主機、螺旋槳聲噪等等。AN/SLQ-25由美國通用航空噴射發動機公司(Aerojet General)的頻率工程實驗室(Frequency Engineering Laboratories)研製,在1974年獲得第一批量產合約,隨後普遍裝置於美國海軍艦艇上, 並大量銷售給西方盟國海軍。 經過國防產業歷年來的的整併,目前SLQ-25由波音(Boeing)旗下的Argon ST生產。 相較於拋棄式的誘餌,拖曳式誘餌只要沒有損壞,就可以一直反覆部署使用;此外,拖曳式誘餌的電力由船艦透過纜線提供,工作時間不受限制(拋棄式誘餌使用海水電池,發射入水後工作時間大約介於6至45分鐘),信號纜線也提供了船艦與誘餌的雙向通信,可隨時根據戰術情況調整魚雷誘餌的工作參數。此外,現代化拖曳魚雷誘餌也把拖曳纜線做成拖曳式魚雷預警聲納,能在比艦體聲納更遠的距離上探測到來襲的敵方魚雷。 基本結構
SLQ-25各系統組成,包括後端信號產生器的機櫃、人機介面、TAC拖曳陣列以及絞車等。 AN/SLQ-25的主體是TB-14A拖曳式音響反制器(Towed Acoustic Countermeasure,TAC) ,負責在水中發射信號來干擾/欺騙敵方魚雷;干擾信號由艦上的後端設備生成(包含信號產生器與放大器),產生的信號透過信號交換器送至TB-14A TAC的拖曳信號纜線,纜線上裝置一系列壓電換能器陣列,負責將電信號轉換成聲信好發射入水中。TB-14A TAC的拖曳纜線透過艦尾的RL-272雙鼓形絞車(功率10馬力,約7.5KW)進行收放 ,拖曳纜繩末端有一個細長的魚型拖曳體(長0.8m,直徑15cm),用來控制陣列的部署(例如深度)。AN/SLQ-25還有一個假負載,用於在靜態狀態下測試信號發射裝置,由信號交換器選擇將發射機的信號送往TAC或假負載。整個AN/SLQ-25的作業由一套遙控裝置進行監控,功能包括選擇操作模式、聲頻過濾、決定頻率循環時間等功能;一旦發現有潛在的敵方潛艦威脅,艦上人員就透過遙控系統控制絞車釋放TAC陣列到距離艦艇後方一定距離,然後開始發射聲噪信號來欺騙敵方魚雷;而具體的欺敵信號頻率、施放拖曳體的拖帶速率、拖曳體部署深度以及聲學操作方式等選擇都依照敵方來襲魚雷的特性而決定。 一般而言,美國海軍驅逐艦、巡防艦等水面艦艇的AN/SLQ-25都配備兩套拖曳裝置,安裝於艦尾的兩個艙門內,而美國航空母艦上則有多達四個拖曳體。操作時,兩個拖曳體採用一前一後的部署,兩者發射的頻率與信號強度不同,如此就能在船艦後方製造一個龐大的虛擬船艦信號,掩蓋船艦本身的聲學特性,誘使用被動聽音的魚雷瞄準SLQ-25形成的虛擬目標; 此外,萬一其中一個AN/SLQ-25拖曳體被魚雷摧毀,另一個仍能繼續發揮作用 。大型航空母艦由於產生的噪音場更大,因此需要多達四具拖曳體來產生足以掩蓋本艦的虛擬信號。冷戰期間,美國海軍核能潛艦部隊對蘇聯海域艦隊各項活動的情報蒐集(這類任務稱為Holystone)相當紮實,包括在蘇聯艦隊進行實彈演習時監聽蘇聯魚雷的各項信號,使得美國海軍獲得不少有用參數,能讓AN/SLQ-25騙過蘇聯魚雷的尋標器乃至於引信。
美國海軍雷根號(USS Ronald Reagan CVN-76)航空母艦的人員進行AN/SLQ-25施放作業 的畫面,最前面的水兵手持拖曳體,準備施放出艙門外。
一套設置在甲版上的SLQ-25,可以看到絞車以及陣列前端的拖曳體。 作為一種拖曳式系統,SLQ-25的操作限制不少,包括在放出TAC之後,艦艇的速度便被限制在10至25節 (操作教範上建議放出拖曳裝置後時速最好不要超過15節,根據提康德羅加級與紀德級的操作經驗,都發生航速15節以上操作AN/SLQ-25而發生損壞的紀錄),也不能做太劇烈的轉向運動,以免過大的應力扯斷了TAC的纜線;但是閃避魚雷時卻艦艇很可能得用上高速與劇烈運動,因而造成了抵觸。 此外,收放操作纜線絞車時,也有不少注意事項,避免造成損壞或發生危險。 歷年型號 SLQ-25的第一種量產型為SLQ-25,信號纜線長488m。AN/SLQ-25的TAC可製造大量噪訊以掩蓋船艦產生的噪音,或者發射船艦 會產生的各種聲響信號(包括主機運轉噪聲、螺旋槳噪聲,以及艦船在特定運作方式、預期威脅特性之下產生的各種頻率的特殊噪聲等),使魚雷誤將誘餌當作船艦而轉向。 SLQ-25的TAC換能器的性能如下:全頻17.5~87KHz,低頻17.5~30.4KHz,中頻29.6~51.7KHz,高頻50.3~87HKz。 在1985年,頻率工程實驗室進行SLQ-25的改良作業,改良後稱為SLQ-25A,在1990年開始部署,並成為美國海軍發展水面船艦魚雷防禦系統(Surface Ship Torpedo Defense System,SSTD,見下文)的第一階段。除了少部分次要機械部位相同之外,SLQ-25A大部分設計與部件都 和原本SLQ-25完全不同。AN/SLQ-25A採用開放式架構,大量引進商規組件(COTS)取代過去的純軍規系統,提高計算機性能並降低後勤維護成本,此外使用光纖拖曳纜線(Fiber Optic Tow Cable,FOTC)取代傳統銅軸電纜,能減少從艦上發射機傳遞信號的損耗。SLQ-25A也有自我減測系統,大幅減輕維修減測的工作負荷。AN/SLQ-25A的干擾能力也有諸多改進,原本SLQ-25產生的各種不同聲噪信號(包含主機、螺旋槳)都相當分立,而SLQ-25A模擬不同音量、頻率的綜合聲噪特徵則更為逼真細緻,使敵方魚雷更難分辨 假目標。 進一步改良AN/SLQ-25B在1990年代後期問世。AN/SLQ-25B以AN/SLQ-25A為基礎,增加了兩項重要的附加功能:首先是結合專門用來偵測魚雷的拖曳式被動陣列感測器(Towed Array Sensor,TAS),又稱為三線接收陣列(Tripwire Acoustic Intercept Receive,TAIR),用來探測敵方發射平台(如潛艦)的聲納信號、魚雷發射時的發射管注水或彈射等瞬間噪音、魚雷推進器運轉以及尋標器拍發信號等;此項改進極具價值,因為偵測來襲魚雷最重要的裝備是拖曳陣列聲納(因為可以遠離艦體自身的噪音,虛警率較低),然而只有反潛任務的驅逐艦、巡洋艦才配備拖曳陣列聲納 ,而屬於高價值船艦的航空母艦、大型兩棲艦艇等都沒有,而SLQ-25B結合偵測魚雷與干擾的功能就能使其功能更為完備。TAS以光纖纜線與艦上 SQQ-89反潛作戰系統的魚雷識別與預警功能段(TRAFS,見下文)連結, 透過能偵測來襲魚雷的方位、速率等資訊,後端系統還能根據魚雷主動聲納尋標器拍發的信號特徵比對資料庫,辨認出來襲魚雷的號。AN/SLQ-25B新增的第二個重要功能就是對付主動歸向魚雷的干擾模式,在拖曳陣列上增加一個大功率聲源(High Powered Source,位於TAIR陣列之前),TAIR陣列接收來襲魚雷的主動聲納信號,後端系統自動分析之後,就發送信號給大功率聲源,朝來襲魚雷發射與其主動聲納相同頻率但增大震幅兩至三倍的假訊號,以製造假的聲納信號回跡,使得來襲魚雷上當。2000年代美國海軍SSDT演變成AN/WSQ-11系統之後,具備TAIR的AN/SLQ-25B也成為整個系統的重要基石 之後的AN/SLQ-25C在2007財年首次進入美國海軍服役,基本上是AN/SLQ-25A進行廣泛的電子升級,包括新的商規現成技術(COST)信號產生器、更長的光纖拖曳纜線,後端系統也增加新的魚雷反制模式。SLQ-25C之後安裝於美國海軍所有艦艇上,在2020財年起開始升級現有SLQ-25C進行EC-2升級程序。 在2009年,美國海軍正式授出AN/SLQ-25D合約,引進開放式系統架構,使其能夠輕易結合其他新系統,使其能利用AN/SLQ-25獲得的水聲資訊來支持情報蒐集與威脅分析等工作。在2012年,AN/SLQ-25D正式成為船艦魚雷防禦系統(Surface Ship Torpedo Defense System,SSTD,見下文)的一部份;隨後,AN/SLQ-25D被重新編號為AN/SLQ-25X,用來作為魚雷探測系統的拖曳部分。然而到2018年,美國海軍取消了SSTD中硬殺手段的魚雷防禦系統(TDS,見下文),SSTD以及AN/SLQ-25X也連帶取消。
為了接替被取消的AN/SLQ-25X,美國海軍在2022年又推出了AN/SLQ-25E的生集成序,主要著眼於替換原本AN/SLQ-25系統中的過時組件,將所有軟硬體升級到基於商規現成(COTS)組件,並致力於模組化以及引進開放式系統架構。AN/SLQ-25E在對抗傳統聲學導引(acoustic-homing)以及尾波導引(wake-homing)以及線導魚雷的能力都有所提升;美國海軍打算將所有現存的AN/SLQ-25都升級為AN/SLQ-25E。 水面船艦魚雷防禦系統(SSTD) 早期發展 由於魚雷尋標器日益進步,開始能分辨誘餌與船艦的信號,使得過去美國海軍用來干擾敵方魚雷的主/被動「軟殺」(Soft Kill)誘餌效益降低 ;許多先進魚雷如美國海軍MK-48續航力長,導引系統具有再攻擊模式,第一次沒有鎖定目標就會兜圈子或埋伏,等待敵方潛艦噪信在出現時進行「再攻擊」,使一次性的軟殺效能大減,何況這類潛射魚雷還有線導模式,由導線與潛艦連接而獲得人員控制,更難被加以干擾;此外,蘇聯推出了尾流歸向的反艦魚雷如53-65K,專門追蹤水面船艦的尾流,聲噪干擾對之不起作用 (不過實際上尾流導引也有限制,一般瞄準鎖定在特定距離(含前置量)例如離艦尾1000m,因此在這個距離以上先製造欺誘尾流就可以予以欺騙,例如自身轉圈或多艦交叉航行來擾亂尾流導引魚雷的導引系統邏輯等)。因此,當時美國認為必須發展能執行「硬殺」(Hard kill)的魚雷反制系統,直接將來襲的魚雷擊毀,才能應付日益精良的導引魚雷技術。於是在1980年代後期,美國國防部展開國家級的水面船艦魚雷防禦系統(Surface Ship Torpedo Defense System,SSTD)研究計畫。 依照當時規劃,SSTD以既有的AN/SLQ-25魚雷反制誘餌系統為基礎進行擴充。SSTD系統核心是一個多感測器魚雷辨識警告處理器(Multi-Sensor Torpedo Recognition and Alertment Processor,MSTRAP),連接艦上所有的水下感測器如艦首聲納、拖曳陣列聲納乃至反潛直昇機投下的聲納浮標(需透過反潛直昇機與艦載反潛系統之間的直昇機資料鏈)等等,發現魚雷來襲之後自動分析目標參數(包含魚雷方位、距離、速率、聲納尋標器工作頻率等),然後控制各種軟殺與硬殺手段進行攔截,軟殺 手段包括AN/SLQ-25既有的拖曳式主動誘餌以及發射式消耗性音響反制誘餌(Launched Expendable Acoustic Decoy,LEAD)。而用來「硬殺」魚雷的「反制魚雷」(Countermeasures Anti-Torpedos,CAT),由MK-46輕型魚雷衍生而來,稱為MK-46 Mod7。
美國海軍潛艦與水面艦都配置人力投擲的ACD MK-2反魚雷聲噪誘餌,而 發射式消耗性音響反制誘餌(LEAD)是以ACD MK-2 Mod1為基礎、改由北約 標準130mm誘餌發射器投擲的版本。 LEAD的發展於1991年開始,是以美國海軍潛艦使用的ACD MK-2 Mod1反魚雷聲噪誘餌為基礎發展而成,結合MK-12助推火箭以及在水面部署的充氣浮袋等,可由北約海軍標準的130mm誘餌發射器如美國MK-36 SRBOC、北約海蚋 (NATO Seagnat)或MK-15臼砲發射,必要時也能以人力投擲。魚雷來襲時,船艦可能已經來不及部署拖曳式的AN/SQL-25誘餌,或者因船艦要高速 航行以及急轉迴避而無法使用AN/SQL-25(拖曳纜繩很可能因受力過大斷裂),就可以迅速朝魚雷來襲方位的海面發射LEAD,或直接以人力投擲ACD MK-2誘餌。LEAD誘餌入水時,浮袋在海水衝擊之下充氣展開,使裡面的ACD MK-2誘餌穩定地漂浮在水中。ACD MK-2 Mod1的工作參數(部署深度以及聲學欺敵訊號頻率等)是由人工直接在誘餌上設定,而LEAD版則透過SRBOC發射器的信號介面來設定;發射或投擲入水後,ACD MK-2 Mod1會自動啟動尾部的螺旋槳推進器,垂直懸浮在預設的部署深度,誘餌上的聲學單元也依照先前設定的頻率不斷發出聲學信號,迷惑敵方魚雷的尋標器。美國海軍在1990年代測試LEAD時,發現用MK-36 SRBOC發射器以火藥爆炸力量投擲時,經常會導致LEAD的干擾器失效,後來花了一段時間才克服。在1997年,LEAD通過美國海軍的技術與使用鑑定,1998年得到首批700套的訂單。 依照SSDT的發展計畫,首先將AN/SLQ-25升級為AN/SLQ-25A(如前述),第二階段則發展用來探測魚雷的聲學系統以及CAT反制魚雷;這是因為開發能快速處理來襲魚雷的聲納系統以及CAT反制魚雷,需要相當的資源與時間 。 魚雷探測拖曳陣列聲納與CAT反制魚雷 理論上,用魚雷攔截魚雷是非常困難的技術,手先受限於水下航行的物理特性限制,反制魚雷的最高航速很難比來襲魚雷高出太多(一般用防空飛彈來攔截敵方飛彈,都要求防空飛彈速率是目標飛彈的兩倍以上),而且反魚雷航速一旦太高則本身聲納尋標器就會受到強大水流聲噪干擾、效能大減。反魚雷的尋標器效能最多也只與魚雷相當(搜索與標定範圍通常不超過1km),光靠魚雷自導鎖定來襲魚雷有很多困難,而如果艦艇使用主動聲納照射來襲魚雷則會徹底暴露本身位置。再者,反魚雷如果使用較小的口徑和尺寸來增加備彈數量,則殺傷半徑也會減小,推進系統續航力以及戰鬥部殺傷半徑也會減弱;如果使用重型魚雷的尺寸,雖然殺傷半徑可能達50公尺,但是代價太高,艦上許多原本可以儲放攻擊性魚雷、戰彈的空間都會被自衛性的反魚雷佔據。而且一旦來襲魚雷加入迴避反魚雷的模式,反魚雷由於速度、續航力與偵測範圍都沒有優勢,將更難有效攔截來襲魚雷。先前美國為了發展能對付大潛深、高速 (40節左右)的蘇聯阿爾發(Alfa)核能攻擊潛艦而發展的潛射先進能力魚雷(ADCAP,即MK-48 Mod5)以及先進輕型魚雷(ALWT,即MK-50),都耗費了漫長的時間與高昂的成本,而要用導向魚雷攔截速度比潛艦更快、轉彎半徑更小的來襲魚雷,只會更加困難。 而 無論是以軟殺或硬殺的方式反制來襲魚雷,最重要的關鍵在於即時偵測到敵方來襲魚雷,並立刻得知其方位,然而這本身是極具挑戰性的工作。水面艦探測敵方魚雷這種小型高速目標的先天弱點,在於艦載固定式聲納通常位於艦首,然而船艦後方有推進器製造的龐大噪音與水流,任何設置在艦體的聲納都會被干擾與阻斷,形成偵測的死角;事實上,任何安裝在艦體上的被動聲納都會被船艦本身推進系統產生的噪音與震動干擾,導致偵測效能下降。再者,艦體聲納的尺寸有限,也導致先天物理上很難有效偵測波長大、頻率低的波段。許多實際運用經驗都顯示光靠艦載聲納偵測魚雷效果並不理想,虛警率極高,例如1964年促使美國派兵介入越南引發越戰的東京灣事件,事後調查顯示當時認為遭受北越魚雷攻擊的美國驅逐艦,應該是起因於聲納誤將螺旋槳推進器的噪音當作魚雷來襲;而1982年福克蘭戰爭時,也發生過英國特遣艦隊艦艇救援中彈受損的友艦時,聲納將友艦斷斷續續的發電機噪音當作接近中的魚雷,導致許多艦支被迫對實際上不存在的威脅進行閃避動作。 因此,只有能遠離艦體自身推進器噪音,而且陣列孔徑足夠的拖曳陣列聲納,能比較有效地準確偵測來襲魚雷。然而,傳統的線性拖曳陣列聲納在艦尾一定角度內,無法直接分辨目標在陣列的左邊或右邊,這是因為當聲波信號來自於與線性陣列為軸向的圓椎面時,陣列上聽音單元的響應完全一致;對於速度慢、距離遠的敵方潛艦,船艦可以透過改變航向、比較拖曳陣列聲納兩邊信號的變化來判斷方位,然而面對高速迫近的魚雷將沒有時間進行操作。針對這個問題,英國在1980年代研究出以三個單元構成「品」字形聽音組件,透過聲波抵達每一個組件的時間差,直接計算信號來源的左、右方位;又,為了有效計算聲源信號的方向,聽音陣列上每個單元的間隔距離需要介於聲源信號波長的1/4到1/2,由於魚雷的信號頻率不算太低(大於600Hz),以拖曳陣列聲納的尺寸並無問題。 美國海軍驅逐艦多配備AN/SQR-19拖曳陣列聲納,而針對沒有拖曳聲納的航空母艦、大型兩棲艦艇、後勤支援艦艇等,美國海軍則開發AN/SLR-24拖曳式魚雷預警聲納作為SSTD最重要的感測器,AN/SLR-24就打算使用前述英國開發的品字形陣列組件。 SSDT的初期研製過程 冷戰結束後美國國防經費大減,自然嚴重影響到SSTD的開發。第一階段的AN/SLQ-25A拖曳式反魚雷誘餌較為順利,從1990年左右裝備於許多船艦上。然而,接下來第二階段由MK-46衍生的MK-46 Mod7反制魚雷在沒有充足的研發準備之下,就進入作戰測試(Operation Test,OT),結果自然很不理想,於是遭到取消。沒有了反制魚雷,自然也不需要專門發展AN/SLR-24拖曳式魚雷預警聲納。而少了偵測魚雷最重要的拖曳陣列聲納,MSTRAP的效果自然大打折扣 。 在1997年7月9日至10日,MSTRAP在夏威夷周邊的太平洋飛彈測試場( Pacific Missile Range Facility)進行獨立的操作評估(Operational Evaluation,OPEVAL)。測試結果顯示當船艦部署AN/SQR-19拖曳陣列聲納時,MSTRAP的整體魚雷偵測效果滿足作戰要求,但在沒有SQR-19的情況下就無法達成理想效果,虛警過高;這個測試顯示MSTRAP無法光靠後端的信號處理與軟體撰寫來克服聲納硬體能力的先天限制 (尤其是缺乏拖曳陣列聲納)。因此,美國海軍作戰測評部隊(Operational Test and Evaluation Force,OPTEVFOR)建議不能單獨部署MSTRAP。整體而言,OPTEVFOR認為當時的SSDT整體測試並不成功,作戰使用上並不匹配,效果有限。 美國海軍的AN/SQQ-89反潛作戰系統從(V)14開始整合MSTRAP,稱為SQQ-89的魚雷識別與預警功能 段(Torpedo Recognition and Alernment Function Segment,TRAFS,到SQQ-89(V)15才算完備),結合艦上SQR-19拖曳陣列聲納、艦首聲納等數據來即時偵測來襲魚雷。此外,AN/SLQ-25B魚雷反制系統結合拖曳式被動陣列感測器(Towed Array Sensor,TAS),使原本的拖曳式干擾陣列也兼具被動探測來襲魚雷的功能,堪稱SLR-24拖曳式魚雷偵測聲納的延續。 英美兩國的聯合研究 英國基於1982年福克蘭戰爭中特遣艦隊飽受阿根廷潛艦威脅的教訓,也在1980年代中期開始研製魚雷防禦系統,計畫稱為Project Talisman。由於英美兩國魚雷防禦需求相似,遂展開技術交流,雙方在1998年簽署合作備忘錄(Memorandum of Understanding,MOU),由美國海軍水下作戰研究中心與英國防衛評估研究協會(Defence Evaluation and Research Agency,DERA)聯手進行SSTD相關研究。在這項合作論證計畫中,評估項目包括魚雷偵測/識別與定位(Detection Classification and Localisation,DCL)、指揮與控制、各種軟/硬殺對抗技術的可行性研究。這項聯合研究的結論指出,SSTD現行的軟殺手段可以有效對付自導魚雷;而整體結論指出SSDT是個長期項目,英美兩國應該繼續努力完成所有的開發工作,並繼續完成各自的SSDT系統。 英國版SSDT:Type 2170 在1990年代,英國與法國Thomson-CSF(後成為Thales)合作發展用來能夠更精確標定與識別的新型拖曳陣列聲納技術,成果應用在Thales的CAPTAS主/被動拖曳陣列聲納系列;而英國在1990年代推出的Type 2087拖曳陣列聲納,硬體架構就是CAPTAS MK.4。在2001年12月,英國國防部正式選擇Ultra Electronics為SSTD的主承包商,並與QinetiQ集團(即原本英國官方的DREA,2001年6月轉為民營的QinetiQ)合作,而美國廠商也參與合作,發展完成後型號稱為Type-2170,首先裝備於2000年代服役的Type 45勇敢級(Daring class)飛彈驅逐艦上,以後也會陸續配備於其他艦艇上。 Type-2170 SSTD全系統包括核心的處理器機櫃、兩具顯控台、Type-2070拖曳式魚雷偵測聲納(使用前述的品字形聽音陣列)以及魚雷主動反制系統、兩具用來投擲消耗式聲噪 裝置(Expendable Acoustic Device,EAD)的八聯裝發射器(左、右舷各一座)等,而相當於原本MSTRAP的核心能力則改稱為「魚雷主/被動偵察辨識」(Torpedo Recognition by Active and Passive Reconnaissance,TRAPR)。 美國海軍提出的偵測/識別與定位(DCL)項目,包括結合主/被動探測技術以及硬殺措施來消滅來襲魚雷。DCL的核心技術是一種兼具主/被動作業模式的拖曳陣列聲納,能以被動方式監聽魚雷航行的噪音以及魚雷尋標器信號,並以高頻主動探測方式偵測附近的水下物體、獲得精確的方位距離速率資訊並判斷是否為來襲魚雷,而最終的反制措施則包含硬殺。總共有兩家公司參與DCL計畫,英國Ultra Electronics以SSTD為基礎推出TRAPR DCL,2006年成功進行首次測試;而另一家參與DCL計畫的則是APC公司。 最初英國版SSTD的拖曳式誘餌仍使用SLQ-25的架構 ,由光纖拖曳纜線以及末端的拖曳體構成,後來由於技術進步,演變成結合主動聲噪反制與Type-2070拖曳式被動魚雷偵測聲納的系統;此拖曳陣列的前段是由主動聲噪發射器單元構成的陣列,稱為彈性拖曳體(Towed Flexible Body,TFB),能直接捲收入絞車,而TFB陣列之後隔著制震模組(Vibration Isolation Module,VIM)連接一段用來偵測來襲魚雷的Type-2070被動拖曳陣列聲納,陣列末端是一個用來控制陣列部署深度與航向的裝置。原本SLQ-25使用RL-272C絞車,而Type-2170則改用直徑更大的RL-272E絞車。TRAPR根據各聲納感測資料(包括艦首聲納與拖曳式聲納等),根據來襲魚雷聲噪以及魚雷尋標器信號來判定型號和來襲方位,然後產生防禦措施,包括建議船艦規避的動作(轉向與航速等)、控制拖曳式主動反制誘餌以及發射消耗性誘餌以適當的模式進行反制等。
英國版SSTD的八聯裝魚雷誘餌發射器
英國版SSTD的八聯裝魚雷誘餌發射器,攝於土耳其雷貝利島號 (TCG Heybeliada F-511)巡防艦上 相較於美國LEAD誘餌使用壓力較大、射程較遠的炸藥包投擲方式,英國版SSTD的EAD誘餌使用由Ultra Electronics開發的八聯裝發射器,使用壓縮氣體發射,壓力較低而射程較短,避免了美國LEAD早期發射後容易故障的問題。EAD發射後,後方會打開一個阻力傘來減緩落水速度,入水後釋出一個懸浮在水中的聲學反制裝置。EAD具有三種作業模式(美國LEAD應該也類似),第一種是模擬航行中的軍艦發出的噪音,第二種是模仿敵方魚雷主動尋標器發射欺誘的回波,這兩種模式分別用來對付敵方與雷的被動聽音與主動導引模式,而且都考慮到目標移動時會產生的都卜勒頻移;第三種則是噪音器模式(Jammer),持續發生高功率噪音來妨礙敵方魚雷的尋標器鎖定目標。 英國自用的2170型SSTD本身拖曳裝置的陣列聲納只有被動聽音模式,而Ultra Electronics公司參與美國海軍DC計畫(見下文)之後又增加主動偵測模式。對於部署Type 2087主/被動拖曳陣列聲納的艦艇(如英國Type 23巡防艦等),則Type 2087的主動/被動功能都可協助SSTD來偵測、追蹤與辨識來襲魚雷。 英國Ultra Electronics Ocean Systems與以色列拉斐爾(Rafael)合作開發了潛艦反魚雷誘餌(Submarine Scutter,SUBSCUT)以及發射消耗性誘餌(Launched Expendable Scutter,LESCUT),兩者技術類似,都屬於拋射式反魚雷誘餌。SUBSCUT可以預先裝填於潛艦內部或者外部的發射器,當潛艦聲納系統探測到魚雷來襲時,就能自動控制SUBSCUT發射;而LESCUT則接在投射火箭上,由船艦的誘餌發射器發射。SUBSCUT/LESCUT工作深度約10~300m,能先部署到水中,感測器能分辨特定型號的魚雷聲噪;探測到來襲魚雷的主動聲納尋標器信號,SUBSCUT/LESCUT能立刻識別,並自動產生且發射相應的干擾信號來干擾來襲魚雷(包含製造都卜勒頻移,讓敵方魚雷誤以為接收到移動中的目標潛艦回波)。當SUBSCUT/LESCUT誘餌的電池號進食,誘餌就自動刪除儲存的軟體並自沈,避免機敏參數被敵方取得。 AN/WSQ-11魚雷防禦系統(TDS) 不同於英國版Type 2170型SSTD只採用軟殺手段,美國之後繼續發展SSTD仍結合軟殺/硬殺手段。 MK-46 mod7終止之後,美國海軍將反魚雷項目降為長期的技術研究,稱為CAT反制魚雷(Countermeasures Anti-Torpedo,CAT),由賓系法尼亞州立大學應用研究實驗室(Pennsylvania State University Applied Research Laboratory,PSU-ARL)負責開發。CAT使用能相容於美國潛艦誘餌發射器的尺寸,整個體積比MK-46魚雷縮小一半,直徑只有6.75英吋(162mm),長度105英吋(2.667m),重量90kg。由於體積縮減,船艦與潛艦就能攜帶更多數量的CAT,而較小的體積也有助於增加CAT的靈活度。自然地,CAT需要能量密度更高的推進系統,能在有限的體積內提供足夠的推進功率,快速攔截來襲魚雷。因此,PSU-ARL採用與冷戰後期開發的MK-50先進輕型魚雷(ALWT)相同的化學能推進系統(Stored Chemical Energy Propulsion System,SCEPS,以鋰金屬與六氟化硫(Li-SF6)反應),能在7到11秒內加速到極速的一半。此種超小型魚雷之後發展成維通用輕量魚雷(Common Very Lightweight Torpedo ,CVLWT)項目,能根據不同需要換裝不同導引段,作為反魚雷或者超輕型反艦/反潛魚雷,能裝備於體型較小的無人飛行載具(UAV)、無人水面載具(UAV)或無人水下載具(USV)上。 在1999年,美國約翰.霍普斯金大學(The Johns Hopkins University,PSU)應用物理實驗室(Applied Physics Laboratory,APL)開始主導用於大型船艦的SSTD項目,發展一種結合主動/被動威脅目標探測、控制處理以及包含軟殺與硬殺的魚雷對抗手段(含CAT反制魚雷)的整體式魚雷防禦系統,裝備於柏克級飛彈驅逐艦、航空母艦、大型兩棲艦艇 (LHA、LHD、LPD、LSD、AGF、 LCC等)、後勤船艦(AOE、AKE等)上。在2000年代上半,這整套系統獲得AN/WSQ-11魚雷防禦系統(Torpedo Defense System,TDS)的正式型號與命名。 依照美國海軍系統司令部(Naval Sea Systems Command )簡報的資料,AN/WSQ-11 TDS系統是建築在先前SSTD之上繼續發展與完善,整套TDS系統包括魚雷警告系統(Torpedo Warning System,TWS)、AN/SLQ-25A/B/C魚雷反制系統(含配套的AN/SQQ-89反潛作戰系統的相關控制後端)以及整合其中的TAS魚雷感測陣列、艦載聲納系統(如拖曳陣列聲納)、CAT反制魚雷系統等。TWS堪稱TDS的核心,這是個獨立而完整的戰術控制、警告、檢測系統,結合船艦上所有相關魚雷感測系統,為水面船艦提供魚雷探測、識別、警告能力,經計算處理後自動產生各種可擊敗敵方魚雷的對應戰術措施,包括具體的船艦規避方案、軟殺干擾與硬殺攔方案等。TWS由目標獲得組(Targer Aquisition Group,TAG)、戰術控制組(Tatical Concrol Gropu,TCG)、備便存放總成(Ready Stow Group,RSG)組成。TAG透過各種水下感測器的資料偵測來襲魚雷、識別其型號以及標定位置(Torpedo Detection,classification and Localization,TDCL) ,其中最重要的是能直接分辨左、右側的被動拖曳陣列聲納(例如AN/SLQ-25B的TAS接收陣列或其他艦載拖曳聲納),並打算進一步納入主動聲納偵測。TCG是整個系統的人機介面 ,負責處理、展示TAG提供的資料,艦橋與作戰中心都設有TCG顯控台,能提供魚雷來襲警報、顯示來襲魚雷方向、距離、速率等資訊;TCG能根據TAG的目標情資自動進行射控解算,並自動將目標資料與射擊解算參數(包含操作模式)輸入CAT反魚雷,最後由操作人員透過TCG顯控台發射。而RSG則是艦上儲存CAT反制魚雷的裝備。 CAT又分成反魚雷(Anti-Torpedo Torpedo,ATT)以及全彈裝備(All-Up Round Equipment,AURE),其中ATT是反魚雷本身,而AURE則是ATT的儲存與發射器,由一個信號介面與TWS連結,並由TCG來控制發射。AN/WSQ-11能以人工或自動模式操作:在自動模式下,TWS系統根據各感測器獲得的戰場態勢自主分析判斷,並選擇適當的軟/硬殺對抗措施,而操作人員仍可參與戰術決策過程;在人工模式下,操作人員將威脅狀態輸入系統中,並由人工決定使用何種軟、硬殺手段。整個系統又稱反魚雷魚雷防禦系統(Anti-Torpedo Torpedo Defense System,ATTDS)。 依照美國海軍的資料,AN/WSQ-11 TDS項目從2006至2008財年進行TDCL的海上展示,2009財年進行CRUDES TDCL系統規格發展。ATT的工程原型階段一(EDM-1)配合通用輕量魚雷(CVLWT)在2007財年進行海上測試;而用來進行系統發展與驗證(System Development and Demonstration)的工程原型階段二(EDM-2)則在2008財年進行設計,並於2010財年完成。在2009財年,會製造ATT工程原型的相關建造裝備(應用於CRUDES)。美國海軍在2017財年在一艘運輸船艦、一艘後群支援船艦上測試TWS,而CAT預計在2021年開始裝備後勤船艦。在開發TWS/CAT的同時,美國海軍也持續進行AN/SLQ-25A/B/C的改進計畫,稱為AN/SLQ-25X,採用開放架構,模組化設計、數位化控制。
(上與下)2013年5月中旬喬治.布希號(CVN-77)航空母艦首次測試 反制魚雷(CAT)的畫面。
在2013年5月中旬,美國海軍首次在喬治.布希號核子動力航空母艦(USS George W. Bush CVN-77)上測試結合CAT反制魚雷的TDS的工程發展模型(EDM);在這項測試中,總共發射了10枚訓練用魚雷來模擬攻擊喬治.布希號,而艦上的TDS測試了全套的功能,包括由TWS系統偵測、識別目標,TCG解算射擊參數並控制發射CAT反魚雷攔截目標。5月第一次測試後,根據經驗對系統進行調整改進,在11月再進行一次測試,共發射六枚魚雷模擬攻擊。測試時為了節約經費,部分工程發展模型2(EDM2)階段的CAT魚雷使用性能較低的OTTO燃料活塞發動機,一部分則使用電池推進系統(可反覆充電使用),只有少部分CAT魚雷使用全功能的封閉循環渦輪。早期測試階段基於安全考量,模擬目標的來襲魚雷設定在比真實魚雷更深的深度,而接下來的測試才將目標魚雷設定在接近實戰的航行深度。 完成測試後,CAT在2014年正式開始部署,優先部署於航空母艦上。在2017財年,美國海軍會驗證ATTDS的潛在升級項目。 到2016年底,美國海軍已有五艘航空母艦部署了CAT反制魚雷以及配套的魚雷警告系統魚雷警告系統(TWS),分別是喬治.布希號(USS George H. W. Bush CVN-77)、艾森豪號(USS Dwight D. Eisenhower CVN-69)、老羅斯福號(USS Theodore Roosevelt CVN-71)、杜魯門號(USS Harry S. Truman CVN-75)以及尼米茲號(USS Nimitz CVN-68)。 原本美國海軍希望到2035財年,所有航空母艦以及高價值艦艇都能配備兼具軟/硬殺能力的完整TDS;然而,TDS的研發只持續了五個財年,到2018財年就終止了(總計花費約7.6億美元,2017、2018年財年編列了約8500萬美元),而美國海軍對這個項目並不是非常認真,累積的資料不足。隨著TDS項目取消,SSTD以及相對應的AN/SLQ-25X也跟著取消。TDS項目取消後,原本裝置CAT的船艦陸續將之拆除。 TDS後續發展:ATT CRAW 雖然TDS項目暫時中止,但美國海軍以CAT為基礎繼續開發通用超輕型魚雷(CVLWT)。在2016年,賓夕法尼亞州立大學應用研究實驗室(PSU-ARL)將CVLWT的設計轉移給軍工業界。未來的無人機(UAV)以及大型無人水下載具(UUV)都可能裝備超輕型魚雷,使之具備水下攻擊能力。 在2020年5月公布的2021財年美國海軍預算申請中,出現了反魚雷緊湊快速攻擊武器(Anti-Torpedo Torpedo Compact Rapid Attack Weapons program,ATT CRAW)項目, 記載是發展一種85英吋長(2.16m)、直徑6.75英吋(171.45mm)的武器(實際上就是延續CAT的規格),能由垂直起降無人航空機(VTUAV)、水下無人載具(USV)部署發射來攻擊敵方潛艦, 並且是基於已經開發完成的反制魚雷(ATT)的硬體發展。隨後CRAW獲得MK-58的編號。在2024財年預算中,美國海軍正式將原本CAT項目的裝備發展與程序整合到CRAW項目中。 在2025年7月初公布的2026財年美國海軍預算申請中,包括AN/SLQ-25E魚雷反制系統的能力精進含增添硬殺能力,即納入MK-58 CRAW並整合在甲板發射器內,目標是部署在 隨後CVLWT成為MK-58緊湊型快速攻擊武器(Compact Rapid Attack Weapon,CRAW)。依照預算文件,最終完成的反魚雷防禦系統(ATTDS)會由幾種新的軟殺、硬殺能力以及早期預警能力構成,能強化探測、辨識魚雷以及摧毀的能力。ATTDS的主要感測器平台沿用AN/SLQ-25E的 魚雷探測拖曳陣列,並以現有魚雷警告系統(TWS)為基礎,在使用CRAW進行硬殺的前提下,強化目標識別以及射控指引能力;此外,ATTDS也會透過技術插入(TI)的方式,進一步提高目前AN/SLQ-25E的軟殺能力。此項目也會發展CRAW使用的發射系統,同時相容於硬殺的CRAW與軟殺的ADC-MK2聲學反制誘餌。反魚雷版本CRAW預計在2026年7月在水面艦上進行測試,此項目的軟、硬體一旦發展成熟,會用技術插入(Technology Insertions,TI)的方式增加到現役海軍船艦上,使現役船艦的反魚雷能力螺旋升級,升級活動持續到2030財年完成。 在2026財年CRAW項目的預算中,大約2400萬美元是用來發展安裝在水面船艦跟潛艦上的反魚雷(ATT)軟體,並排訂在先進處理器構築2(Advanced Processor Build,APB2)交付,APB-2的發展持續到2026財年第四季。至於APB-1則是發展CRAW用於維吉尼亞級核子攻擊潛艦的反潛作戰版。 除了關於反魚雷(ATT)項目外,2026財年美國海軍預算中也配合CRAW發展名為「左輪槍」(Revolver)以及「裝填器」(Reloader)的設備來相容於維吉尼亞級核子攻擊潛艦的533mm魚雷發射器跟垂直發射器,每一個發射管能容納多枚CRAW或3吋的無人空中載具(UAV)及無人水下載具(USV)。
AN/SLQ-61輕型拖曳魚雷防衛任務模組(LWT TDMM) 為了配合空間與容量較為有限的LCS濱海戰鬥艦艇,美國海軍以AN/SLQ-25為基礎發展了輕量化版本,稱為AN/SLQ-61 輕量化拖曳(LightWeight Tow,LWT)魚雷防禦任務模組(Torpedo Defense Mission Module ,TDMM),是LCS任務模組(LCS MM)計畫的一部份。AN/SLQ-61是一種模組化、全數位控制的軟殺魚雷反制系統,使用一套拖曳式水下魚雷探測以及聲學干擾發射系統,可用來對抗主/被動聲納導引或尾流歸向的魚雷。相較於AN/SLQ-25,AN/SLQ-61的體積與重量顯著減低,因而更適合部署在LCS以及其他的小型水面作戰艦艇上;而AN/SLQ-61的設計與性能也是針對近岸淺水域作業環境進行優化。 在2018年5月2日,美國海軍發佈,AN/SLQ-61 LWT魚雷反制模組在一艘商用船隻上成功完成為期兩天的測試,這是AN/SLQ-61最終海上測試的一環,隨後就準備部署到所有的LCS艦隊上。LCS近海戰鬥船艦項目任務模組( Mission Modules,MM)主管Theodore Zobel表示,此次測試非常成功,並且代表AN/SLQ-61已經準備好整合到LCS近海戰鬥船艦上。
|