Nulka主動式消耗性誘餌
美國海軍提康德羅加級神盾巡洋艦安提坦號(USS Antietam CG-54)的誘餌發射器,中間兩組較長的雙聯裝發射器
就是MK-53 NULKA發射誘餌系統的MK-137 Mod 10發射器,兩側為MK-36 SRBOC的MK-137六聯裝誘餌發射器。
美國海軍在2000年代為提康德羅加級神盾巡洋艦展開大規模改良,項目包括加裝NULKA誘餌。

安提坦號在2014年美國海軍勇敢之盾演習(Valiant Shield 2014)中發射戰斧巡航飛彈的畫面,可以看到艦體中部的
MK-137 Mod 10 Nulka誘餌發射器。

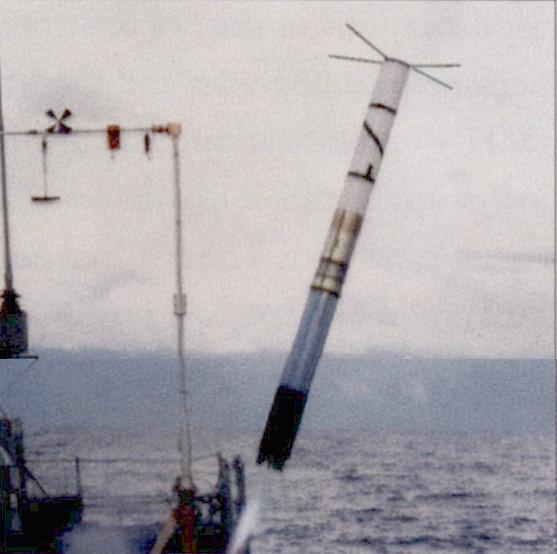
美國海軍柏克級飛彈驅逐艦梅森號(USS Mason DDG-87)在2018年環太平洋軍事演習(RIMPAC-2018)中
,發射一枚Nulka誘餌的瞬間。

美國柏克級飛彈驅逐艦穆斯汀號(USS Mustin DDG-89)的MK-137 Mod 10 Nulka誘餌發射器。
──by Captain Picard
|
前言 傳統的消耗性反飛彈裝備如紅外線誘餌或鋁箔片等在發射之後,其命運就忠實地由物理定律決定:本身有動力的誘餌就依照著簡單的拋物線航道飛行,而沒有動力的誘餌更僅相當於斜向拋射,沒多久就落入大海。此外,大部分的消耗性誘餌都是「無源」的反制裝備,也就是本身不會發出反制用的電磁波。 美國與澳洲合作開發的Nulka是一種離艦主動消耗性反制誘餌(off-board Active Expendable Decoy,AED),與傳統誘餌相較有兩大不同之處:第一是具有飛行控制能力、程式化的飛行模式以及較長的滯空時間,第二則是本身就擁有電磁干擾波發射器,故為「有源式」反制裝備。將主動電磁波反制裝置搬上發射式誘餌是近年來新一代艦載消耗性反制裝備的發展趨勢,導致此種趨勢的客觀環境之一就是反艦飛彈 日漸進步。 早期反艦飛彈採用圓椎掃瞄雷達尋標器,測量目標方位角的方式時需對目標多次發射電磁脈衝,測量脈衝震幅變化來判斷目標方位,因此以往艦艇只需要 複製敵方雷達信號脈衝,加入適當頻移而調製成假的回波信號(常用模式為距離欺騙和方位欺騙兩種),再以主動式電子反制系統朝敵方雷達發射,就能順利干擾使用圓椎掃瞄的反艦飛彈 ,使其朝向一個假的接觸位置(例如一團還在空中漂浮的金屬干擾絲製造的假目標)前進。然而日後較新型的反艦飛彈都改用單脈波(Monopulse)方式測量角度,只需發射一個脈波就能測出目標角度,對主動式電子反制裝備的一般手段(如發射頻率、相位、震幅、時間的干擾波 )完全免疫,因為這些後續補上的電磁波信號不影響單脈衝測角結果 ,一般的主動電子反制技術很難模擬單脈衝雷達的脈衝,無論是距離欺騙或方位欺騙都無法製造有效而且距離反制發射源(船艦)夠遠的假回波。由於艦載反制系統固定在船艦上,干擾源的方位對反艦飛彈而言永遠與目標相同,因此在干擾方位測定無效的情況下,就算反制系統能混淆反艦飛彈的測距,反艦飛彈還是能由追蹤角速度來獲得足夠的目標位置解算。 某些新型反艦飛彈甚至還有干擾歸向模式(Home on Jammer,HOJ),直接朝著干擾波的來源前進,讓主動式反制系統反而招致攻擊。 美國在1970年代初期就成功發展出單脈衝尋標器並用於飛彈上,因此估計蘇聯遲早也會發展出類似技術;蘇聯第一種配備單脈衝尋標器的反艦飛彈是1980年代的AS-16,其單脈衝終端主動雷達尋標器能輕易分辨鋁箔製造的誘餌,並且具有干擾歸向模式,將敵艦上主動電子反制裝置的電磁信號來源作為目標。 除了單脈衝尋標器帶來的挑戰之外,能識別目標外型的逆合成孔徑雷達(Inverse Synthetic Radar,ISAR)尋標器逐漸成熟,也讓各種傳統的無源誘餌(包括發射在空中散佈的金屬干擾絲,或者在水面上充氣的角反射器誘餌)效用降低。ISAR技術是透過雷達反射信號對目標成像,進而分辨出誘餌與艦艇外型的差異,甚至還可透過雙向資料鏈將目標的ISAR雷達影像傳回發射載台(船艦或軍機),以人工或自動作業方式進行目標辨識。蘇聯在1980年代推出的3M80蚊式(北約代號SS-N-22)超音速反艦飛彈就使用了逆合成孔徑雷達尋標器。而面對逆合成孔徑雷達(ISAR)尋標器,也只有靠主動式電磁干擾來製造適當的欺誘回波,有比較高的成功率。 由於很難直接精確複製單脈衝雷達的信號,主動反制系統的唯一有效對應措施,就是讓電磁干擾波發射源離開船艦,不僅避開HOJ攻擊模式, 還能製造多個方位不同的假目標回跡來避開單脈衝測角的優勢(就算單脈衝測角的電子反反制能力再強,如果一開始就抓到錯誤目標也會上當)。因此,能離開船艦的「有源式」發射性誘餌就是很好的選擇,除了單獨使用外,也能搭配艦載主動式反制系統來混淆反艦飛彈 ;由於電子科技進步,將複雜的主動反制系統的電路與組件才能夠塞入體積小的誘餌之中。將昂貴的有源干擾裝置當作消耗品射入空中之後,自然應該有較長的滯空時間以及設計過的欺敵航路,以增加作用時間 ,提高誘騙反艦飛彈的機會 。 此外,1982年英阿福克蘭戰爭時,英國遠征艦隊的電子防禦作戰經驗也顯示干擾彈滯空的時間必須延長。發現阿根廷軍機來襲時,英國遠征艦隊就會先發射干擾彈,在艦隊遠方上空散佈干擾絲雲,製造大型雷達迴跡來遮蔽艦隊,一開始就使阿根廷軍機(如果是搭載飛魚反艦飛彈的超級軍旗機)的射控雷達更難鎖定高價值目標;然而,從雷達第一次發現阿根廷軍機到阿根廷軍機(可能)發射飛魚反艦飛彈之前有一段間隔,一開始散佈的金屬干擾絲到飛彈真正發射時可能已經落海或被風吹散,失去了保護作用,而這段時間又很難讓艦上的人員重裝填干擾彈並發射形成新的金屬干擾雲。在當時,皇家海軍使用航空母艦搭載的海王式直昇機吊掛雷達反射器,在空中形成一個可以持久的大型假目避免接近英國航母的飛魚反艦飛彈真正遭到鎖定。而具有火箭推進的干擾彈,就可以提高在空中的作用時間,在前期敵機迫近,到後期萬一有飛彈發射而需要後續措施的情況下,更能達成防禦的目的。 Nulka便具備上述「有源」、「滯空時間長」、「具有特殊欺敵航路」等特性。 發展歷程
為了增加消耗性誘餌的效率以及運用彈性,同時應付日益刁鑽的反艦飛彈,美國海軍實驗室( Naval 依照DSTO方面在1970年代後期的估計,在擁有相當產量的情況下,每一枚這種主動式誘餌價格可控制在2萬美元以內;然而, 這樣的價格期待並不實際,「溫寧」計畫概念展示階段研發的懸翔式火箭載具顯示,光是載具的單位成本就達到1萬美元;此外在1979年,能滿足需求、搭載於誘餌上的主動式電子反制籌載仍不存在。 而未來最大的潛在客戶──美國海軍,此時也還沒有這類誘餌的正式需求。到1982年,估計每一發這種主動式誘餌的價格高達3萬美元(電子戰籌載與火箭載具大致各佔一半) ,同時期傳統的誘餌彈每發只要1000美元,新的北約海蚋(Sea Gnat)每發也只要5000美元。在1982年5月,投入福克蘭戰爭的英國皇家海軍Type 42驅逐艦雪菲爾號(HMS Sheffield D80)在南大西洋遭阿根廷海軍發射的法製飛魚反艦飛彈擊毀,引發全球關注,而這也是澳洲媒體首度廣泛公開報導澳洲正在開發的「溫寧」主動反制誘餌計畫。 美國海軍在1970年代末的偵察、電子戰、特種作戰與海軍辦公室(Reconnaissance, Electronic Warfare, Special Operations, Navy Office)等單位也提出了主動式電子反制誘餌的發展提案,打算透過修改後的MK-137誘餌發射器(屬於MK-36 SRBOC)發射。雷松( Raytheon)與桑德斯協會(Sanders Associates,後來併入BAE System)獲得主動式電子反制誘餌的概念發展合約,美國海軍研究實驗室(NLR)位於Dalmo Victor的分部也獲得資助發展另一種稱為「主動式電子浮標」(Active Electronic Buoy)的版本。雷松與桑德斯的團隊最後都提交一種符合需求、能收/發電子信號的誘餌提案,但NLR卻沒有成功提交一個實際原型。由於無法提出一個可行的誘餌飛行載具方案,美國海軍沒有繼續進行這個計畫,直到1980年代中期澳洲提供自身的「溫寧」計畫的提案。在1984年5月22日,美國海軍與澳洲聯邦政府正式簽署研究成果分享協議(Research Exchange Agreement),雙方互相交換各自計畫的資訊。 在1984年時,美國海軍估計每一發這種主動式誘餌價格很難低於4.2萬美元,甚至可能由6萬美元起跳。 在1986年8月11日,澳大利亞 與美國簽署合作備忘錄,使這個計畫成為兩國合作計畫,稱為Nulka離艦主動消耗性反制誘餌(off-board Active Expendable Decoy,AED), 計畫總經費為1.1億澳幣(8700萬美元),其中7220萬澳幣的工作額度是在澳洲完成,雙方聯合計畫的總成本約1.3億澳幣。 在1988年1月16日,澳洲政府正式與AWA防務公司(AWA Defence Industries,AWADI)簽署合約成為Nulka的主承包商,負責Nulka的工程發展以及火箭系統;AWADI是英國航太澳洲分公司(British Aerospace Systems Australia Ltd,BAE)在1988年成立的子公司。在1988年10月,美國洛克西德.馬丁旗下的斯皮肯公司(Lockheed Martin Sippican Inc)獲得合約,負責發展Nulka誘餌的電子戰籌載(原屬Thales的ADIT也有參與)。其他次承包商包括澳洲航天技術公司(負責數位飛行控制系統)、澳洲防衛工業公司等 火箭發動機由美國Aerojet公司提供。 在1990年10月7日,Nulka在Woomera進行第一次陸上試飛(DT-IIA階段),隨後在1991年2月進行DT-IIA第二階段飛行測試(包含封閉式速度控制迴路),前六次都成功,但隨後三次由於組件可靠度問題(包含電阻材料、製造工藝)而失敗;為了解決可靠度問題,在1992年2月進入關鍵設計審查(Critical Design Review,CDR)之前必須再成功進行四次試射,在1991年12月成功進行了測試測試分析與修正測驗(Test Analysis and Fix trial )。 在1992年,Nulka在美、澳兩國的艦上展開測試,澳洲方面以柏斯級(Perth class)飛彈驅逐艦布里斯班號(HMAS Brisbane D41)作為平台,美國則以史普魯恩斯級驅逐艦約翰.漢庫克號(USS John Hancock ,DD-981)作為測試平台。在1992年5月19日,布里斯班號進行了Nulka的首次艦上試射(DT-IIB-D階段),結果相當成功 ;同年9月11日,Nulka在美國海軍約翰.漢庫克號上進行首次試射,第一次試射時火箭推進器爆炸而失敗,但接下來連續八次試射都成功完成,在1992年12月通過美國海軍的 作戰測試評估(Operational Evaluation Trial ,OPEVAL)以及澳洲本身Nulka作戰測試(OT-IIA)作業。在1993年9月,美國國會同意撥款資助Nulka計畫。在1993年11月,Nulka完成全尺寸工程發展階段。 在1991年,皇家澳洲海軍選擇Nulka作為SEA 1229主動飛彈防禦誘餌(Active Missile Decoy,AMD)計畫。SEA 1229計畫是澳洲方面對Nulka彈藥以及發射系統的基礎研發,Phase 1在1994年6月30日簽署合約,主要是發展射擊控制系統(此階段先發展一套獨立的誘餌發射系統,用於測試評估),並包括開發一套用於評估誘餌有效性的空載常規威脅模擬器( Generic Threat Simulator,GTS)。SEA 1229 Phase 2、3則在1995年結合成單一的階段,主要是配合安裝於澳洲紐澳軍團級(Anzac class)與阿德萊德級(Adelaide class)巡防艦上的相關系統整合工程,將AMD整合入這些艦艇的作戰系統中,此外也包含發展服役後的各項後勤與技術支援等。在Phase 1之中,BAE澳洲分公司在1994年6月30日獲得訂單,生產若干測試用的誘餌彈。在1994年10月,CSC澳洲分公司(位於阿德萊德)獲得一紙合約,負責射控系統發展階段的軟體確認與驗證(Validation and Verification,V&V)服務。 在1996年6月25日,美澳雙方簽署Nulka量產作業的備忘錄。 在1996年7月15日,位於澳洲新南威爾斯(New South Wales)Mulwala的生產設施通過了Nulka誘餌系統的量產準備審查(Production Readiness Review),意味量產工作準備就緒。 在1996年8月9日,澳洲政府將Phae 1的合約擴展為艦載射控系統以及相關發展、訓練作業(原本這些屬於Phase 2/3)。在1997年3月,皇家加拿大海軍與英國航太(BAE System)簽約,正式引進Nulka系統來裝備部族級(Iroquois class)飛彈驅逐艦。在1997年6月,澳洲政府正式簽署Nulka的初期量產合約,滿足皇家澳洲海軍和美國、皇家加拿大海軍的需求 ,美國海軍也在1997財年起編列預算購置Nulka。美國最初打算購置90套Nulka誘餌系統以及450枚主動式誘餌,在1996年又進一步擴大訂單 。在1997年3月,澳洲第一艘裝備完整Nulka系統得阿德萊德級飛彈巡防艦墨爾本號(HMAS Melbourne FFG05)在雪梨花園島海軍工廠完成了所有系統整合工作。在1998年8月17日,Nulka系統在美國海軍史普魯恩斯級驅逐艦彼得森號(USS Peterson DD-969)上正式通過由美國海軍指揮官作戰測試評估團隊(Commander Operational Test and Evaluation Force)主持的第二階段B(OT-IIB)作戰測試(Operational Eevaluation Test)。在1999年1月18日,美國海軍正式宣布Nulka進入里程碑3( Milestone III ),進入全速率量產。總計SEA 1229Phase1花費2000至6000萬澳幣,Phase 2/3花次6000萬至2億澳幣。 基於SEA 1229 AMD的成果,澳洲隨即正式展開Nulka的開發計畫,稱為SEA 1397。SEA 1397 Phase 1為全工程發展階段(Full Scale Engineering Development,FSED)與操作評估,在1998年1月16日完成;Phase 2是研究合約,在1996年3月簽署,1997年完成,Phase 3是後續的評估與生產改進/發展(product improvement/development),Phase 4是提供壽期生涯的製造與支援系統,而 Phase 3/4的合約是在2001至2002財年簽署;Phase 5包括庫存補充(Phase 5A,2009年完成)以及發射器子系統升級(Phase 5B)。 在2001年8月31日,Nulka正式進入皇家澳洲海軍服役,並在2001年10月17日通過作戰測試評估(Operational Evaluation,OPEVAL);在2005年3月11日,Nulka達成全戰備能力(Operational Release,OR)。在2006年1月1日,皇家澳洲海軍頒佈Nulka的服役期間支援(In-Service Support,ISS)合約,在2011年又簽署GTS的ISS合約。 在2007年,裝備Nulka誘餌系統的艦艇正式達到100艘,包括83艘美國船艦、14艘澳洲船艦與3艘家拿大船艦(部族級驅逐艦)。 至2009年,澳洲6艘阿德萊德級(此時有2艘除役)與8艘紐澳軍團級巡防艦以經全面加裝Nulka系統 ,而此時仍在規劃中的荷伯特級(Hobart class)飛彈驅逐艦也裝備Nulka。 在2010年,第1000套Nulka系統出廠。 從最初澳洲本國少數頂尖科研人員以及研究機構進行的前瞻構想,經過超過20年努力,Nulka成為 澳洲國防產業規模最大的例行出口項目,也堪稱澳洲對西方軍事技術最具代表性的貢獻。
(上與下)柏克級Flight 2A飛彈驅逐艦的威廉.勞倫斯號(USS William P. Lawrence DDG-110) 船艛兩側各設置兩組MK-53 Nulka誘餌發射器。攝於2019年5月新加坡。
基本技術 一套Nulka由四個主要子系統構成,分別是探測威脅來源的電子截收裝置(ESM)、AWA研製的誘餌射控計算處理機、發射器、 以先前「溫寧」計畫為基礎的懸翔式主動誘餌彈構成。Nulka干擾彈長208.3cm,直徑15cm,單枚重50kg,可搭載12.2kg的有效荷載;誘餌彈為圓柱型,頂部有一組類似直昇機的四葉片旋翼(透過馬達驅動),透過旋翼旋轉來使彈體轉動,進而將誘餌彈的電子干擾天線對準目標方向。旋翼下方就是Nulka搭載的有源干擾籌載,由美國斯皮肯公司提供,能發射I/J波段信號(這是反艦飛彈尋標器的典型操作頻率),以大功率轉發類似反艦飛彈尋標器的I/J頻信號回到飛彈,使飛彈誤以為得到回波;此一有源干擾機的扇區覆蓋較廣,單枚就能同時針對好幾枚反艦飛彈進行轉發。Nulka火箭向量推力控制系統包含三塊可控的阻力板,每個都由獨立的電力伺服裝置驅動;其中,一對阻力板安裝在火箭發動機噴管上,用來產生一個縱軸向的力矩來控制彈體旋轉,第三塊減速板斜向通過火箭發動機噴嘴,能直接減低火箭產生的推力,彌補誘餌在空中因為燃料消耗而減輕的重量,使誘餌維持控制在預設的軌跡。為了滿足長時間懸浮制空以及精確控制軌跡等需求,Nulka干擾彈配備由固態微處理器控制的脈衝火箭發動機以及向量推力控制系統;干擾彈搭載數位式飛行控制處理器(digital Flight Control Unit),安裝在火箭發動機前面,整合有廉價型大氣速率感測器、三軸速率偵測器(由兩組雙軸陀螺儀構成)來掌握誘餌本身的運動,並根據發射前設置的參數以及升空後船艦傳回的修正指令,控制誘餌的發動機與氣動面來調整誘餌的航跡。 Nulka系統具有一個由澳洲AWA公司研製的誘餌射控計算處理機,根據船上電子截收裝置(ECM)等感測裝置傳來的威脅參數(包括威脅類型、目標輻射信號特徵、目標飛行速度與方向、外界風速與風向等)或人工輸入的參數,自動計算Nulka誘餌的相關操作參數,包括發射時間、方位、在空中的最佳飛行軌跡等,再經由一個介面將參數傳給發射管裡的Nulka誘餌。Nulka干擾彈發射之後便由誘餌本身搭載的數位處理器來控制,干擾彈搭載的電磁波發射器會發出類似船艦的雷達回跡以吸引敵方反艦飛彈的雷達尋標器,並依照預先輸入的高度(通常為100m)和軌跡在空中徘徊,模擬船艦在海中運動的軌跡,以吸引來襲的反艦飛彈;除了發射前預設的參數之外,Nulka的艦載系統也能持續根據艦上感測器的資料來計算修正參數,將修正的飛行指令傳給在空中懸翔的Nulka誘餌。透過特殊的氣動力控制系統,Nulka可以在空中向上、向下或橫向移動,或繞縱軸向旋轉,模擬船艦在海上的運動,讓敵方反艦飛彈的導引系統軟體更難分辨這是誘餌或真實目標。由於具備優秀的操控性,Nulka能在60節的強風以及五級海象等惡劣氣象環境下有效運作,能在空中懸停與定位。Nulka能在發射升空後的10秒以內就位並展開工作,並能在空中停滯大於55秒鐘,射程與制空時間大於傳統的無源誘餌。在較低的飛行高度下,Nulka無論是運動軌跡或發射的電磁信號都酷似一艘船艦,一枚在空中的Nulka就可以對同一個扇區裡所有的來襲飛彈產生迷惑效果,能有效對抗飽和攻擊;Nulka最後會讓飛彈從誘餌下方通過,使之無法重新截獲目標。日後澳洲DSTO以及美國等都進一步研究擴展主動式誘餌的能力,例如DSTO研究以小型渦輪扇發動機來取代原本的固態火箭發動機,能讓懸停式誘餌在空中持續操作更久的時間;而美國、澳洲也都曾研究在Nulka上裝置更多樣化的籌載,包括雷達、紅外線搜索/跟蹤系統,使Nulka也能作為補充船艦生存能力的監視裝備。 澳洲為Nulka提供的配套電子截收裝置(ESM)是AWA研製的被動雷達識別系統(PRISM), 採用四個喇叭餽源單脈衝天線陣列,結合信道化的電晶體接收機(使用比振幅技術),透過後端分散式計算機網路來處理接收到的信號, 後端資料庫能儲存600種已知的電子威脅信號。此一ESM的探測信號頻率範圍是2~18GHz,測向精確度優於10度(rms),動態範圍50dB, 靈敏度高於-70dBm,能在多種輻射背景信號中即時發現威脅的脈衝信號來源,並對之進行側向與分類。之後進一步改良的PRISM-II將工作頻 率擴展到更低的頻段(0.5~18GHz),PRISM-III進一步引進瞬時測頻技術以及脈衝分析技術,後端資料庫容量也擴大到儲存2500種已知電磁威脅信號。 在Nulka發展初期定義的架構中,系統的控制處理核心為誘餌發射處理器(Decoy Launch Processor,DLP),透過發射器介面單元(Launcher Interface Unit,LIU)與艦上每個誘餌發射器連結。在全工程發展(Full Scale Engineering Development)階段中,進一步確定DLP與LIU的分工:DLP與艦上感測器或作戰系統連結,取得目標資訊並進行射擊解算 ,然後選擇要用來接戰的誘餌發射器,透過LIU將誘餌發射參數設定到指定發射管的誘餌上;而LIU在傳遞指令時, 會根據所選擇的發射器進一步算出射擊參數細節,以滿足DLP要求達成的彈道,為此系統還需要從船艦上的動態感測裝置(航向、船艦運動狀態等) 以及風向、濕度、溫度等大氣感測裝置取得必要資料作為解算依據。 為了配合美國海軍的需求,Nulka全工程發展階段還使用修改後的美國AN/SLQ-32電子戰系統結合,直接提供目標參數並控制Nulka誘餌系統。 在澳洲海軍自用的Nulka系統架構之下,DLP直接與艦上作戰系統連結, 由在艦上作戰中心整合,需要一個射控面板(Fire Control Panel)作為操作人員的控制。 在1994年6月30日簽約啟動的澳洲海軍主動飛彈防禦誘餌第一階段(Active Missile Decoy,AMD Phase 1)中,澳洲自用版Nulka系統架構爭過調整,將原本LIU負責的彈道記算功能 整合到射控面板(Fire Control Panel)中,使得誘餌發射器本身所屬的控制迴路與裝備能夠簡化, 能夠放載一個更輕更小的機箱內。然而,一開始相關單位擔心AMD Phase 1的預算不足以完成這些研發工作 (包括研製射控面板面板以及重新設計LIU)。 理論上,美澳雙方可以研製一種共通的處理器動力供應單元(Processor Power Supply,PPS,誘餌發射器的伺服控制與信號傳輸介面), 然而澳洲AMD計畫選擇發展自己的版本。 澳洲海軍AMD計畫辦公室選擇CEA公司為Nulka研製PPS單元,雖然這引來主承包商AWADI的不滿。 由於AMD Phase 1計畫初期設定的安全限制,顯著降低了處理器速度, 這個問題在1995年射控面板的初期設計審查(Preliminary Design Review)中 被暴露出來,而安全限制也影響了其他許多性能;隨後,這些限制在後續的研發工作中被取消。 澳洲版的Nulka使用四聯裝的長方型發射箱,加拿大皇家海軍也使用相同的版本。 相較於美國版Nulka與SLQ-32電子戰系統結合,澳洲版Nulka是獨立單元,透過介面與艦上作戰系統連結,因此更具有彈性,比較利於出口。
美國為Nulka提出的一個發射器版本是MK-137 Mod7,直接在原本MK-137 Mod4 六聯裝誘餌發射器上結合Nulka的雙聯裝發射器;而將雙聯裝Nulka發射箱獨立設置的版本 是MK-137 Mod10。 美國版本的Nulka是整合在AN/SQL-32電子戰系統底下;而考量到控制成本,美國版Nulka打算盡量利用現有MK-36 SRBOC誘餌發射系統的技術,直接利用現有SRBOC的MK-137發射器來結合Nulka誘餌發射箱。 美國也決定,將原本Nulka系統架構之下的發射器介面單元(LIU)裡相對應的誘餌射擊解算工作一併整合到誘餌發射誘餌發射處理器(DLP)之中, 其餘的發射器介面功能則改由每個誘餌發射器附屬的介面與控制單元負責,稱為動力供應處理器(Processor Power Supply,PPS)。 在1994年初,美國海軍選擇Dahlgren公司來為這種結合Nulka的SRBOC誘餌發射器開發新的PPS,而美國海軍也在1995年6月開始與AWA防衛工業協商修改Nulka軟體架構 ,把原本由LIU負責解算的功能整合到DLP裡,稱為飛行控制軟體通用軟體(Flight Demand Algorithms Common Software)。這種利用MK-137發射器技術結合Nulka發射箱、新的PPS單元以及新版DLP的美國版Nulka系統,稱為MK-53誘餌發射系統 。美國在1994年推出兩種配合Nulka的發射器,一種是直接在MK-137 Mod4六聯裝發射器上附加雙聯裝Nulka發射箱的版本,稱為MK-137 Mod 7,第二種則是在MK-137底坐上設置獨立的雙聯裝Nulka發射箱,稱為MK-137 Mod10。依照最初的規劃,PPS要同時控制Nulka以及原本的SRBOC誘餌(包含雷達與紅外線誘餌); 然而,為了節約成本、避免發射系統過於龐大複雜,美國海軍最後還是決定讓PPS單元單獨控制Nulka, 日後美國海軍實際部署的MK-53 Nulka系統也都配置MK-137 Mod10發射器。 澳洲在2010年代下半開始發展的Nulka性能增強(Enhanced)計畫,包括換裝新的電子掃描陣列(ESA)發射機、 新的緊致接收機鏈以及更好的隔絕層,提高性能。
澳洲紐澳軍團級巡防艦的柏斯號(HMAS Perth F-157)的四聯裝NULKA誘餌發射器 ,設置在前部船艛兩側。 攝於2015年新加坡國際防務展(IMDEX 2015) 部署方面,Nulka可由本身的射控系統操作 而自成一個獨立的防禦系統,或者整合至艦艇的整體戰鬥系統內。美國海軍 將Nulka反制系統整合至下一代美軍艦艇必備的船艦自衛系統(Ship Self Defense System,SSDS)中,並且獲得良好的測試成果。Nulka以經安裝於提康德羅加級飛彈巡洋艦、柏克級飛彈驅逐艦、史普魯恩斯級驅逐艦、懷德貝島/哈潑渡口級 船塢登陸艦等超過130艘美國艦艇;在2007年7月,美國海軍裝備Nulka的船艦數量達到83艘,而全世界裝備Nulka的船艦也至此超過100艘 ;至2010年6月,超過150艘澳洲、美國、加拿大海軍船艦配備了Nulka誘餌。 此外,洛馬集團在2000年代推出用來搭配MK-41垂直發射器的可擴展發射系統(Extensible Launching System,ExLS)時,也將Nulka納入,這是一種四聯裝的發射裝置,可裝入MK-41的發射管;其他納入ExLS彈種包括RAM Block 2以及非視線火力投射系統(Non-Line-of-Sight Launch System,NLOS-LS,2010年中旬遭到取消),都採用四聯裝設計。
Nulka誘餌升空瞬間。注意前部的四個旋翼,這是用來控制誘餌彈體旋轉。
從美國海軍MK-137 Mod 10發射器發射的Nulka誘餌
從澳洲海軍艦艇發射的Nulka誘餌。
|