Librascope Lora SUBICS-900水下作戰系統
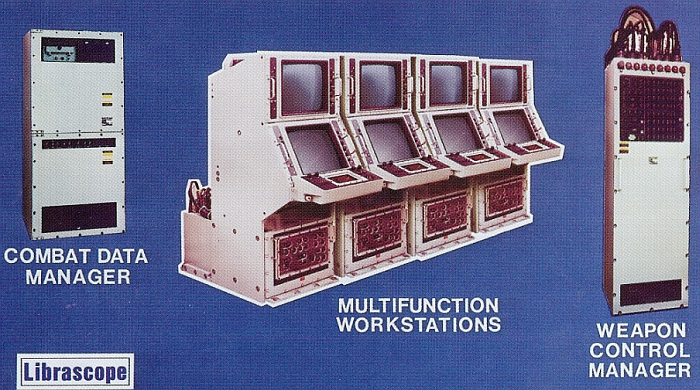
Librascope Loral的SUBICS-900潛艦作戰系統,主要中樞是圖中三個部分:一個戰鬥資料管理者(CDM)單元、
一個武器控制管理者(WCM)單元,以及四部作為人機介面的雙螢幕多功能工作站。
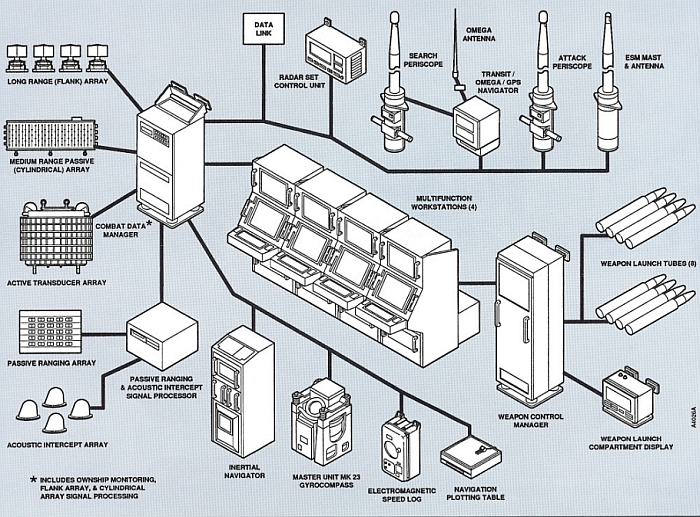
SUBICS-900潛艦作戰系統的系統架構圖
──by Captain Picard
|
在1970年代,美國位於加利福尼亞州格倫戴爾(Glendale, California)的Librascope公司曾推出SFCS MK1潛艦射控系統,當時號稱是全世界第一種全數位化的水下射控系統;SFCS MK1潛艦射控系統以美國海軍俄亥俄級彈道飛彈潛艦的MK-118潛艦射控計算機架構為基礎進一步發展而成,使用UYK-20電腦為核心,記憶體容量409K words,能同時接戰2個目標。SFCS MK1能整合15種不同的感測器,其中包括9種聲納。澳洲在1980年代升級英製奧克斯利級(Oxley class)柴電攻擊潛艦時,加裝了SFCS MK1潛艦射控系統來控制艦上的MK-48魚雷以及魚叉反艦飛彈。在1988年,美國同意出售埃及潛射魚叉反艦飛彈並整合在埃及向中國購買的033潛艦上,射控系統的介面由Loral提供,並整合在埃及選擇的德國製潛艦作戰系統中。 在1992年,Librascope被Loral Space & Communications購併,成為Librascope Loral;在1996年,Librascope Loral被洛克希德.馬丁(Lockheed Martin)集團購併。 在1990年代初期,Librascope Loral推出潛艦戰鬥系統900(Submarine Integrated Combat System,SUBICS-900)作戰系統,大量使用現成的商規軟硬體,作業系統平台為Unix。SUBICS-900以及同系列產品曾被多個柴電潛艦使用國採用。 SUBICS-900整合艦上所有的水上、水下感測器(含雷達、電子截收以及聲學裝置、光電感測),能同時追縱68個接觸目標。SUBICS-900具備整合監視偵察(Integrated Surveillance)以及威脅處理(Threat Prosecution)所需的戰術評估與計畫能力。作戰導航機能包括顯示電子海圖,修正本身船位與推測航位(Dead Reckoning,DR),依照戰術態勢規劃機動方案(包括航路以及速度),並且標示所有的天然或人為威脅。SUBICS-900能紀錄儲存任務期間獲得的電子、聲學以及影像,此外也內建訓練系統,可在停泊或航行期間執行各種任務與戰術模擬訓練程序。射控接戰方面,SUBICS-900最多能同時接戰四個目標,包括以三枚魚雷攻擊三個水面/水面目標,並發射一波反艦飛彈攻擊一個水面目標。SUBICS-900系統大量使用現成的商規軟硬體,作業系統平台為Unix。 SUBICS-900系統主體包括一個戰鬥資料管理者(Combat Data Manager,CDM)單元、一個武器控制管理者(Weapon Control Manager,WCM)單元,以及四部作為人機介面的多功能工作站(Multi-function Workstations)。CDM的計算機設備整合在一個機櫃裡,主要工作是整合艦上所有導航設備、聲學與電子感測器傳來的本身位置動態以及目標接觸信息,進行各樣整合運算處理、分配工作。 WCM則整合了武器射擊的控制與運算功能,主要設備整合在一個機櫃裡,並且有一個專屬的武器控制介面;WCM具備自動威脅處理能力,協助操作人員控制魚雷、反艦飛彈等武器攻擊目標。透過WCM,操作人員發射前設置魚雷與反艦飛彈的參數,準備完成後執行發射;魚雷發射後,透過導線與操作人員進行雙向互動,操作人員透過導線下達指令、更改參數等,而魚雷則將聲納接觸信息與本身運作狀態從導線回傳給操作人員。WCM能同時攻擊四個水面/水下目標,包括同時指揮三枚線導魚雷攻擊三個水下/水面目標,加上發射一至四枚反艦飛彈攻擊一個水面目標。 艦上操作人員透過四個多功能工作站存取SUBICS-900的各項機能,包括作戰導航、擬定戰術計畫、整合監視情報、威脅處理、監視全艦系統運作與判斷故障、艦上訓練、紀錄與存取數據等等;每個多功能工作站有兩個縱列的19吋CRT顯示器,解析度為1280x1024,刷新率為60Hz,具備觸控功能。 SUBICS-900整合的導航相關系統包括: 1.用於水面航行或潛望鏡深度的船隻定位、航速測定系統,包括Transiti衛星導航、Omega、無線電導航系統以及GPS衛星定位系統等。 2.慣性導航(Inertial
Navigator)在浮航與潛航狀態隨時計算潛艦本身航向、位置、速度、艦體姿態等信息。 4.回聲探測器(Echo Sounder)利用主動聲波,探測潛航深度、海床深度、潛艦所在身度的聲速與水壓等。 5.一個航跡桌(Navigation
Plotting Table),由艦上戰鬥資料管理系統(CDM)提供各種感測器信息,負責推算目標姿態、距離以及動態分析。 1.艦首圓柱狀被動陣列聲納(Cylindrical Array Sonar):負責中距離寬頻/窄頻探測、窄頻與DEMON目標識別,能同時追蹤八個目標。 2.被動測距聲納(Passive Ranging Sonar):用來計算已經被圓柱狀主/被動陣列聲納探測到的目標的距離。 3.側舷平面被動陣列聲納(Flank Array Sonar):提供長距離監視、寬頻/窄頻探測、窄頻目標識別,能同時追蹤八個目標。 4.被動聲學截收聲納(Acoustic
Intercept Sonar):負責截收敵方主動聲納信號並進行定向、識別等作業,主要用於探測有敵意船艦或來襲的水下武器。
6.本艦空蝕與自噪監視系統(Ownship Cavitation and Self-Noise
Monitoring):能探測本身船艦噪音,對水聲系統進行必要適應調整,降低自噪干擾,同時也監控本艦是否發出異常聲響。
|