MK-34/35/37/39/45潛艦用魚雷/SUBROC潛射反潛火箭
一枚美製MK-37 480mm導向魚雷。

布魯克級巡防艦(USS Talbot FFG-4 ex-DEG-4)艦尾魚雷管發射一枚MK-37魚雷。當時布魯克級巡防艦、
賈西亞級巡防艦艦尾都裝備兩個固定式魚雷發射管來發射MK-37魚雷,目的是朝魚雷來襲方向直接攻擊敵方潛艦。
由於線導魚雷日漸成熟,潛射魚雷不再只是單純直線追蹤水面艦聲源,因此後向魚雷管實用性大減,因此日後陸續拆除。

1950年代美國海軍潛艦最強大的戰術武器之一:MK-45星式(ASTOR)核子線導魚雷。

位於內華達州的Hawthorne彈藥博物館陳列的展品,三個綠色物體是美國海軍使用過的潛射魚雷,
由上而下分別是MK-37魚雷、MK-45核子魚雷以及MK-48533mm重型魚雷。

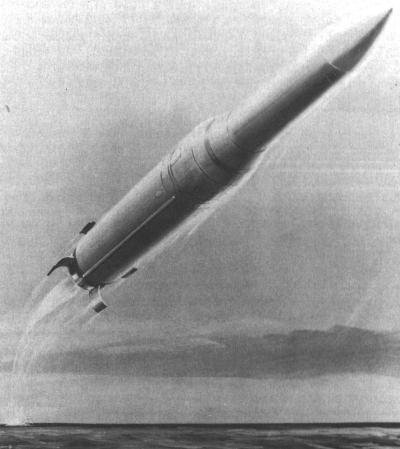
UUM-44潛射反潛火箭(SRBOC),由火箭將核子炸彈載運到第一匯聚區(約35海里)並投放核子深水炸彈。

出水點火升空瞬間的UUM-44潛射反潛火箭

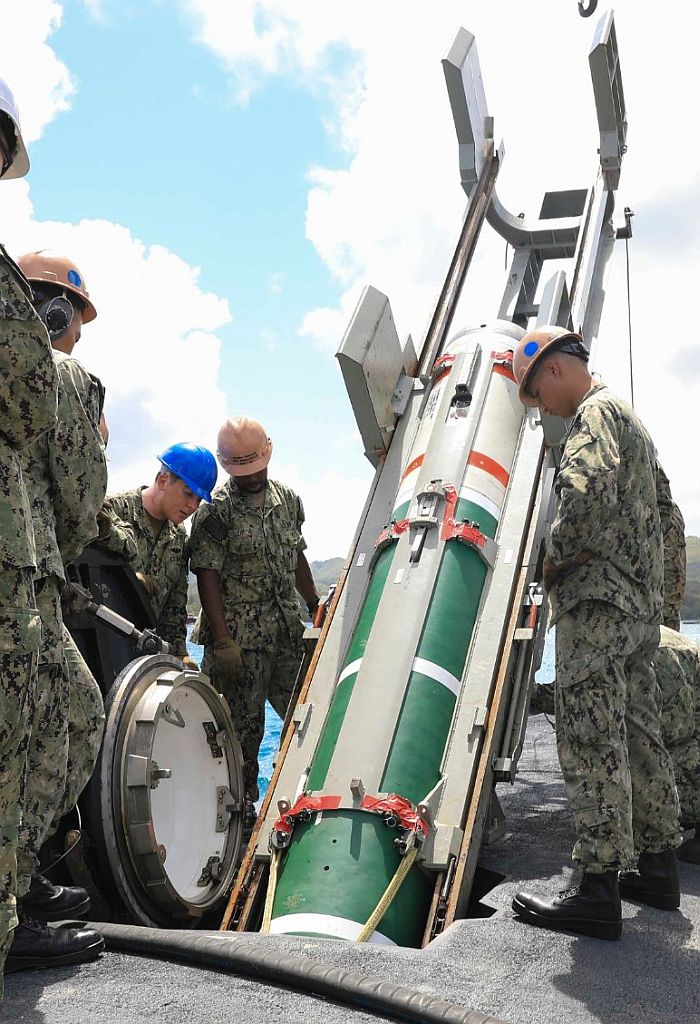
(上與下二張)洛杉磯級核能攻擊潛艦蒙特佩利爾號(USS Montpelier SSN-765)在希臘索達灣(Souda Bay)
的基地裝填MK-67潛艦用機動水雷(SLMM)。MK-67是利用MK-37魚雷改裝而成的自走水雷,
佈放之後可以自力機動部署到特定地點(如敵方必經的狹窄航道),抵達後就潛伏在海床,相當於沉雷。

洛杉磯級核能攻擊潛艦蒙特佩利爾號


(上與下三張)洛杉磯級核能攻擊潛艦安納波里斯號(USS Annapolis (SSN 760)裝填一枚MK-67水雷
;艦內人員架設輸送通道、移除部分甲板,再將裝填的武器從艦首逃生艙口降入艦內儲彈架。
架設通道的過程十分複雜,要移除艦內許多地板;一旦架設完畢,裝填彈藥的速率就相當快。


──by Captain Picard
|
MK-33被動歸向魚雷
MK-33美國海軍在1946年設計的533mm導向魚雷(最初稱為MK-334導向水雷),能由潛艦發射或由飛機投放,這是美國海軍第一種採用鋁合金製造殼體的魚雷。MK-33長3.962m,直徑533mm,重803kg,戰鬥部重249kg(HBX炸藥),採用電力推進,航速27節時射程15000碼(13710m),採用被動聲納尋標器。MK-33從沒有進入服役,但日後部分設計被MK-35被動歸向魚雷沿用。 MK-34被動歸向魚雷 MK-34是美國海軍在二戰末期(1944年起)設計的空投導向魚雷(最初稱為MK-44導向水雷),以1942年服役的MK-24空投音響魚雷為基礎,換裝一個磁致伸缩(magnetostrictive)被動聲力尋標器,1948年服役。日後美國海軍委託ORL發展MK-27 Mod4魚雷(見下文)時,也使用類似的技術來改進MK-34的導引系統。 先前的MK-24魚雷直徑19吋(483mm),長84吋(2.1m),全重310kg,戰鬥部重92磅(42kg)並採用MK142接觸式引信採用電池推進,航速12節,有效射程4000碼(3.7km),採用被動聽音歸向,搜索距離約10分鐘。 MK-34 Mod1長度125吋(3.175m),直徑與MK-24相同都為19吋(483mm),重522kg,戰鬥部重116磅(77 kg,HBX炸藥)。MK-34採用電力推進,搜索時航速11節,以11節航行的射程12000碼(11000m,約30分鐘),而最大航速為17節,航速17節時射程3600碼(3300m,約7分鐘)。 MK-34在1948年起服役,共生產4050枚,在1958年左右除役。 MK-27被動導向魚雷/MK-39線導魚雷 MK-27 在1943年服役,是美國第一種被動音響歸向魚雷──1942年服役的Mk 24 Fido空投反潛魚雷的潛射版本;因此,MK-27也是美國第一種潛射音響魚雷。 MK-27被美國海軍暱稱為Cutie,作為潛艦被日本反潛舢舨追擊時的自衛武器,潛艦能在緊急下潛同時,用艦艉魚雷管發射MK-27來反擊敵船。MK-27沿用MK-24的被動尋標器,此尋標器是朝側方(-90度)形成寬波束,因此搜索時魚雷需採螺旋航道來搜索目標。MK-27沿用MK-24的直徑,是19吋(483mm)而不是美國海軍魚雷管的21吋(533mm),也成為美國潛艦部隊第一種直徑為19吋的魚雷。作為純粹的反潛魚雷,MK-27不需要如21吋魚雷的大型戰鬥部(用來對付大型水面船艦),可減輕重量、加快裝填時間,較小的體型可增加魚雷靈活度以及減輕推進系統負擔(1950年代的魚雷電力推進能力仍然有限);另外,由於MK-27直徑小於魚雷管,因此可以採用游出式(swing out)發射,發射管注水後以魚雷自身動力游出,不需由壓縮空氣彈射,避免壓縮空氣在水中產生巨大聲響而使敵方潛艦警覺。 MK-27魚雷長90英吋(2.28m),重720磅(326.6kg),有效射程5000碼(4.6km),使用Mk 11 Mod 2接觸式引信,戰鬥部重95磅(43kg,使用HBX-1炸藥),最大航速12節,具有陀螺儀。由於MK-27航速太慢,並不適合作為反潛魚雷。1944年服役的MK-28被動歸向反艦魚雷,直徑就是21吋(533mm),航速20節。 在1946年起,賓夕法尼亞州立大學(Pennsylvania State University)的彈藥研究實驗室(Ordnance Research Laboratory,哈佛大學在1945年將上百名水下實驗室的魚雷研究科學家與設備移轉給賓州州立大學而成立ORL)以MK-26為基礎發展改良型,強化反潛能力。在1948年,蘇聯拒絕撤出朝鮮半島,並協助成立朝鮮人民共和國,美蘇情勢急速升高;因此,美國海軍在1948年推動改良MK-27成為反潛魚雷,稱為MK-26 Mod4。MK-27 Mod4是配合新的電子設定式射控系統,使用65pin的臍帶(umbilical)纜線,導引系統引進真空管組件,並換裝新陀螺儀提高穩定性。MK-27 Mod4長度增至126英吋(約3.2m),用於提高戰鬥部體積以及推進電池容量,魚雷全重增至1175磅(532.9kg),戰鬥部重量增為128磅(58.1kg);雖然MK-24 Mod0電池支持的航行時間跟原本一樣都是12分鐘,但由於航速從12節提升到16節,射程遂從原本5000碼延長到6200碼(5.7km)。 由於作戰模式改變,MK-27 Mod.4在靠近水面進行自衛射擊時,射擊的目標從以往小型水面船隻(反潛舢舨)改成在通氣管深度的敵方潛艦,其深度與潛艦深度相當;此種情況下,為了避免魚雷發射後被動尋標器鎖定發射艦本身的聲音轉回來攻擊,因此MK-27 Mod4導引系統裡增加「反迴轉電路」(Anti-Circular Run,ACR),萬一魚雷發射後轉向180度就會自動失效。MK-27 Mod 4雖然航速略為提高為16節,但考量到魚雷本身航速必須比目標高出50%,理論上只能攻擊航速10節的目標,對於大戰末期出現的德國Type XXI潛艦(使用通氣管巡航就能達到10節,使用電池在水下衝刺時更達18節)幾乎無能為力;當時美國推測蘇聯很快就會仿製類似Type XXI水平的潛艦,因此MK-27 Mod 4只能作為過渡性的潛射反潛魚雷。從1949年開始生產,總共生產4000枚,服役到1960年左右而被MK-37取代。 由於MK-27時代的魚雷自導尋標器性能不足,搜索範圍有限,敵方潛艦只要進行高機動閃避,就很可能離開魚雷的尋標器範圍,導致魚雷迷失目標 ,甚至可能回過頭找上發射艦。因此,美國海軍在1955年委託ORL利用MK-27 Mod4魚雷來實驗線導技術,由一條金屬導線連接發射艦,能從艦上射控系統接控制;而Vitro corporation公司也參與此項工作。此種魚雷隨後被賦予MK-39 Mod1的編號,1956年進入服役。 MK-39以MK-27 Mod4被動音響魚雷為基礎,進一步加裝基於線導的控制系統以及總長度13000碼的導線(魚雷尾部有10000碼長的導線捲線器,魚雷管中另有長度4000碼的捲線器,總長度13000碼);由於射程延長到13000碼(11887m),MK-38也進一步升級推進系統,能全程以16節速率航行。MK-39沿用MK-27 Mod4的被動聽音尋標器,潛艦自己以的被動聲納波束會同時追蹤目標與發射出的MK-39魚雷,射控計算機比較聲納接觸方位以及魚雷方位差距而解算出修正向量,然後將修正信號通過導線傳到MK-39魚雷來修正航向;當魚雷上被動尋標器收到的目標音響訊號強度高到一定程度(代表已經迫近目標)或者導線完全釋放時,魚雷就切換成自主歸向導引。此種導向機制稱為「乘向」(bearing rider)導引,根據潛艦上的被動聲納的波束方向來修正航向。 MK-35長3.378m,直徑533mm,重578kg;戰鬥部維持與MK-27 Mod4相同,重59kg(HBX炸藥),採用電力推進,航速15.5節時射程13000碼(11.89km)。 美國海軍總共改裝過24艘潛艦(包含七艘二戰型潛艦),使其能發射並導引MK-39魚雷;這些改裝包括線導射控系統以及在魚雷管增加捲線器。但MK-39魚雷總產量僅60枚(一說是120枚),多數接受改裝的潛艦都沒有真正配備過這型魚雷。 MK-39線導魚雷使用上有許多不便;每艘潛艦每次只能發射一枚,艦上的被動聲納需持續追蹤目標來產生修正信號傳給魚雷,期間潛艦幾乎沒有戰術機動的自由;此外,MK-39魚雷的噪音容易讓敵艦警覺,而由於發射艦需要將發射管與前方聲納都對準目標,因此線導魚雷來襲方向幾乎等於向敵艦提示了發射艦的所在位置,極容易遭到反擊。 最後,MK-39在1960年代被兼具線導和尋標器的MK-37 Mod1所取代。 MK-28被動歸向反艦魚雷
MK-28由西屋電子(Westinghouse
Electric)製造,是一種被動聲納歸向的反艦魚雷,1944年進入美國海軍潛艦部隊服役,與MK-27反潛魚雷形成。MK-28長度246吋(6.25m),直徑21吋(533mm),配備一個重585磅(265.35kg)的MK-28
Mod2戰鬥部(使用HBX炸藥)以及Mk 14 Mod
2接觸式引信,最大航速約19.6節,有效射程約4000碼(3.6km),搜索時間約6分鐘,導引系統包括陀螺儀慣性導航以及被動聲納歸向。MK-28服役到1952年左右,被兼具反艦/反潛的MK-37魚雷取代。 在1946年,美國海軍委託通用電氣發展一種「通用型」(Universal)魚雷,兼具反艦與反潛功能(先前美國發展的各種導向魚雷,都只能分別擔任反艦或反潛任務),以反潛為主、反艦為輔,並發展空射(重量限制在1200磅以內)與艦射兩種版本;不過隨後空射型取消(因為空射型重量最好在1000磅以內),改為艦射與潛射型號,設定直徑是潛艦魚雷管的21吋(533mm)。MK-35預定取代先前的MK-24/27/32/33等各型導向反艦或反潛魚雷。 美國海軍對MK-35魚雷的性能要求是參照二戰末期德國的Type XXI型潛艦,由於其水下衝刺能達到18節,考慮到魚雷速度需大於目標速度50%,理論上需在27節以上,因此美國海軍要求MK-35的速度達到30節;此種航速要求恢復到無導引的MK-18電力推進反艦魚雷的水平,因此也能攻擊航速18至20節的水面船艦。而配合獵殺潛艦(SSK)組織成反潛組柵的需求,MK-35的射程需達15000碼級(約13.7km),以攻擊SSK的反潛責任區內的潛艦。 在當時,被動聲納尋標適合攻擊產生較大聲噪的高速目標(如巡航中的水面船艦或使用通氣管在水下航行的潛艦),而主動聲納適合攻擊在水下潛伏、以電池推進的潛艦。由於當時尋標器技術的限制,魚雷如航行速度太快,尋標器受到強大水流聲響以及本身航行自噪遮蔽,就聽不到目標的推進器空蝕噪音;但如速度太慢,又追不上水面船艦。而為了兼顧追擊速度較高的水面目標以及在水下低速航行、噪音極低的潛艦,通用決定在MK-35上首次使用結合主/被動音響技術的尋標器。 為了達到美國海軍要求的30節航速以及15000碼射程需求,通用電氣採用海水啟動電池(Seawater-activated battery)來取代傳統的鉛酸電池;此電池以海水作為電解質,魚雷入水後海水才會進入,所以魚雷本身不需要攜帶電解液,可減輕重量,也不會有硫酸電解液的安全問題以及鉛酸電池的維護問題(需定期充放電來防止硫酸鹽化,充電過程又要排放氫氣以避免爆炸)。此種海水電池氯化銀(AgCl)作為陰極,鎂(Mg)作為陽極,這個組合具有很高的能量密度(理論上約460Wh/kg),是鉛酸電池(理論密度170Wh/kg)的兩倍多;其缺點是銀很貴,所以每次演習都需要設法回收操雷,因此有人稱MK-35為「魚雷界的勞斯萊斯」。 MK-35的推進系統也首度採用同軸反轉雙螺槳,而不是以往的單螺槳。兩個同軸反轉螺旋槳可自行抵銷扭力矩,使魚雷自然形成滾轉平衡;再加上MK-35的重心刻意設置於浮力中心下方,跟潛艦一樣能保持垂直靜穩定而不需要主動維持,使魚雷導引系統可省略專門的滾轉陀螺儀,降低成本並簡化系統。 MK-35長4.089m,直徑533mm,重803kg,戰鬥部重122.5kg(HBX炸藥),採用海水電池推進,航速27節時射程15000碼(13710m),無論射程、速度、威力都高於先前美國的導向魚雷。裝填於發射管時,MK-35透過一條直徑25mm的導線與艦上射控系統連結,艦上射控系統會傳來目標初始資料(方向、目標距離等),發射時就予以切斷,靠魚雷本身的主/被動聲納尋標器搜索敵方。MK-35能預置航道與射程、攻擊深度以及搜索模式(由左或由右)。MK-35的尋標器在被動模式工作時,聽音距離1000碼;而主動模式的工作距離1500碼;根據不同目標,MK-35尋標器有三種工作模式,分別是深度低於50英尺(對水面船艦或通氣管航行的潛艦)、大於50英尺(下潛的潛艦)以及無限制(不確定目標深度),發射前需選擇其一。 潛艦使用的MK-35是Mod1,艦射版是Mod2,兩者主要差別是潛艦上的射控系統指令信號是直流電輸出,魚雷導引系統是直接接收直流電(由魚雷電池供電),但水面船艦的射控系統指令信號卻採用交流電輸出。 雖然MK-35使用當時美國最先進的導向魚雷技術,作戰測試的結果卻不理想。以二戰型艦隊潛艦以9節速率潛航作為目標,由於MK-35魚雷以27節以上速率航行時噪音太大,潛艦在偵測驅逐艦發射魚雷入水的聲音後,可輕易透過TMA目標動態分析追蹤魚雷的路線,並規劃閃避航線,有效躲避MK-35魚雷。MK-35魚雷的主/被動音響尋標器工作距離只有1000至1500碼,而前面10000至14000碼的航行距離都只能依照發射前輸入的初始航線盲目前進;因此當MK-35發射後,潛艦聽到魚雷的聲音後改變航向,等MK-35魚雷到航程終端啟動尋標器時,潛艦很可能已經離開了魚雷可以追擊甚至探測的範圍。 MK-35於1947年推出,在1948年開始量產,1949年投入服役,至1952年共生產了400枚。在當時,美國海軍也一同開發MK-37導向魚雷,以MK-35作為攻擊性魚雷(攻擊目標如船團、驅逐艦)、MK-37作為防禦性魚雷(反擊敵方前來的反潛船艦),一如先前美國潛艦部隊使用21吋的MK-28被動導向高速攻擊魚雷(20節)以及MK-27低速防禦魚雷(12節)的組合。然而,後來美國海軍改變計畫,將技術更為先進、通用性高的MK-37作為「攻防兩用」魚雷,並完全取代MK-35。在1960年,MK-35除役,被MK-37取代。 此外,美國海軍還在1948年發展MK-35由反潛機投放的衍生型,編號MK-49,1949年服役。MK-49減輕了長度與重量,長度降為3.048m,重量降為602kg,戰鬥部重量只有68kg(HBX炸藥),航速25節時射程8000碼(7320m)。MK-49落水後進入螺旋搜索航道,以側向的被動尋標器搜索周邊所有方位(空投魚雷不需要擔心魚雷射後迴轉180度誤擊發射艦的問題)過程發現目標,就會反轉進入追擊航道(使用更低的轉彎速率擴大轉彎半徑);在追擊航道中如發現目標進入600英呎的距離,就切換到攻擊航道,以接近直線衝刺的方式衝向目標。而如果在追擊航道的繞圈中失去目標接觸,則魚雷會恢復螺旋搜索航道;而如果目標失去接觸時的距離小於600呎,則會以固定深度方式搜索,以增加重新接觸發現目標的機率。MK-49總共只生產200枚,服役時間不長,很快就被MK-43取代。 MK-36被動歸向魚雷 MK-36是一種533mm潛射魚雷,設計工作始於1944年,其特點是航速高(47節),但最後並沒有實際服役。雷體長6.248m,直徑533mm,重1814kg,戰鬥部重53kg(HBX炸藥),採用海水電池推進,航速47節時射程7000碼(3300m)。MK-36並無尋標器,只以陀螺儀和比例導引(pattern running)來維持設定的航向。 MK-37潛射主/被動歸向魚雷 MK-37是美國海軍在二次大戰結束後開發的潛艦用導向魚雷,研發工作始於1946年,由賓州大學彈藥實驗室(ORL)與西屋(Westinghouse)負責,其導引系統以先前MK-18魚雷的主動聲納尋標器為基礎,加上被動歸向功能,並使用新開發的雷體。MK-37堪稱美國海軍在二次大戰後第一種比較成熟的潛射導向魚雷,生產量大且服役時間久。 MK-37的聲納尋標系統以ORL的前身之一──哈佛大學水下聲音實驗室(Harvard University Underwater Sound Laboratory ,HUSL)先前開發的技術為基礎。在1942年,美國海軍啟動181號計畫(NO-181),分別委託哈佛大學水下聲學實驗室與通用電氣(General Electric,GE)以MK-24被動音響魚雷為基礎,發展主動音響歸向魚雷;在此計畫中,HUSL首次發展出磁致伸縮(magnetostrictive)技術來製作主動聲納的發射器(Transducer),被動聽音是將水中傳來的聲能轉成磁能,主動發射則是將磁能轉換成聲能;魚雷前端有多個發射器型成陣列,並套上橡膠外罩,合成的主動聲納波能向前聚焦。當時雖然通用擊敗哈佛取得MK-32的合約,但實際上哈佛的導引系統方案比通用先進,特徵包括引進都捕勒濾波來分辨主動聲納信號拍發到海底、海面或海中浮游物等回波造成的混響(為此要設計發誓電路、補償魚雷運動產生頻移的電路等,聲納必須使用長脈衝來減少魚雷自身噪音的干擾,並使用較窄的波束來減少不同方為的頻移...等),以自動音量控制(Automatic Volume Control,AVC)技術來自動偵測混響強度來調整探測門檻值(只探測音量比混響高出5分貝、持續時間超過5ms的訊號),使用角錐掃描(Conical Scan,聲納波束以一定偏角繞中線旋轉,藉由訊號強度變化判斷目標方位相對於中線的偏差角,如此只需要一組迴路就能測量目標方向)...等等。 一開始MK-37定位為跟MK -27相仿的防禦性反潛魚雷,是當潛艦遭到敵方水面反潛艦攻擊時用從後部魚雷管發射來自衛,其直徑跟MK-27一樣是19吋(480mm),比魚雷管(21吋)小,能使用游出式發射,或者利用導軌裝入533mm魚雷發射管裡。MK- 37初期設定的攻擊目標是排水量100噸、航速6節的敵方反潛巡邏艇,發射後可先以5節繞圈搜索45分鐘,發現目標後加速到30節追擊,但只能以此速率衝刺5分鐘(相當於5000碼距離)。隨後,美國海軍放棄無線導能力的MK-35,將MK-37作為攻防兼備魚雷,可同時攻擊水下的潛艦或水面航行目標;然而,如用來攻擊水面船艦,MK-37因為體型較小(直徑僅19吋,而不是原本反艦魚雷的21吋),威力就嫌不足。 MK-37魚雷採用鋅/氧化銀電池推進,理論能量密度可達460 Wh/kg,與MK-35的鎂/氧化銀海水電池相當。實際上MK-37的Mk-46鋅/氧化銀電池所達到的能量密度為50~60Wh/kg,比鉛酸電池的30~40Wh/kg高出近一倍。MK-37全程以26節航行時的射程為10000碼,低於MK-35的15000碼,主要是因為MK-37的體型與電池容量較低。不過MK -37的推進系統具有雙速能力,高速模式下推進馬達輸出34馬力,航速可達26節以上,而低速模式則以11.5馬力輸出,航速17.5節,航行距離23500碼航行距離。 MK-37在1955至1956年 進行發展測試工作,第一種量產型Mod 0在1957年進入服役。MK-37 Mod0直徑482mm,雷體長3.429m,重量649kg,採用MK-46鋅銀電池以及當時最安靜的電動馬達,以最大速率26節航行時射程10000碼(9.14km),速率17節時射程23500碼(21.5km),最大攻擊深度 約1000英尺(約305m)。配備一個150 kg、使用HBX-3炸藥的高爆戰鬥部。MK-37 Mod0採用主/被動脈被動都卜勒(Doppler)聲納尋標器歸向(主動尋標器信號頻率為60Hz),尋標器搜索範圍約700英尺(213m);魚雷射出後,中途航行階段靠著陀螺儀維持航道,接近目標時再開啟尋標器來搜索、鎖定目標。發射時,MK-37以自身動力游出魚雷管,而不是靠 外動力彈射。最初導引段的電子裝置採用真空管元件,爾後改成半導體固態組件。MK-37的推進系統採用MK-46銀鋅電池,被詬病過熱問題,這也被懷疑導致1968年6月5日美國海軍核能攻擊潛艦天蠍座號(USS Scorpion SSN-598)沈沒的兇嫌之一。 第一代的MK-37 Mod 0發射後,會先依照發射前從艦上射控系統獲得的初始航路航行(由魚雷的陀螺儀導航系統維持航向)15分鐘進入目標區,之後啟動被動聲納,以蛇形或繞圈航線搜索並追擊目標,當距離目標700碼時切換到主動聲納。由於發射後的預設航道時間長達15分鐘,敵方潛艦在這段期間很可能已經聽到魚雷聲噪並進行閃躲機動(改變航向與深度),等魚雷開啟尋標器時可能已經無法偵獲。 由於美國海軍已經透過MK-39魚雷驗證線導技術的可行性後,隨後也要求在MK- 37魚雷整合入線導系統,成為第一種同時具備主/被動聲納尋標以及線導模式的魚雷,型號為MK-37 Mod 1,在1960年服役。MK-37 Mod1發射後進入預設航道時,潛艦射控系統能持續根據敵方潛艦聲納接觸資料來計算出潛艦與魚雷的相對動態,計算出修正指令並透過導線傳遞給魚雷,使魚雷在啟動尋標器之前仍能有效接近目標。早期美國海軍配合MK-37 mod1使用的魚雷射控系統是Mk8射角計算器(angle solver),此系統以儀表來展示攔截目標所需的航向(即射控解算的參數),而操作人員則以一個人工控制的轉盤來控制射出的MK-37 mod1魚雷,將魚雷航向調整到由Mk-8射角計算器所指示的攔截所需航向重合,如此才能將魚雷控制到能以聲納尋標器鎖定目標的範圍;而之後美國海軍也新增了自動控制魚雷的射控功能。由於魚雷後部增加長度13500碼的導線與捲線器,MK-37 Mod1雷體長度增加到4.089m,重量增為766kg,由於推進系統不變,因此最大航速有所降低,而且最大航速航行時射程只有7.3km。 引進線導技術使MK-37 Mod1變得更複雜,並且面臨一些問題:首先,在「乘向」導引模式下(魚雷依照潛艦被動聲納波束方向前進),魚雷會保持在潛艦被動聲納對目標的瞄準線上,對於潛艦聲納而言,目標噪音就會與魚雷聲噪方向重疊,可能干擾潛艦聲納的追蹤作業。而目標潛艦透過探測來襲魚雷方向,也等於得知了發射的潛艦的方向;而之後的改進是修改導引迴路,使線導魚雷以不同的方向接近目標。此外,潛艦同時只能導引一枚線導魚雷,魚雷在線導階段航速只有14.7節(避免導線受力過大),潛艦的機動也大受限制。早期MK-37 Mod1在演習中表現不佳,曾有發射24枚中故障16枚的記錄;在某一場演習中,11枚MK-37 Mod1魚雷雖只有1枚故障,但其中5枚被假想敵(核子潛艦)探測並成功迴避閃避;還有一場演習中發射40枚MK-37 Mod1,僅7枚命中目標,另有28枚失效或脫靶。 隨後MK-37又持續 進行改良,主要項目包括改進電子系統,尋標器用壓電陶瓷換能器(ceramic piezoelectric transducers)取代原本的磁致伸缩(magnetostrictive)換能器,搜索範圍遂從先前700碼(640m)增加到1000碼(910m)左右 ,而且能避免過去聲納在深度增加而導致靈敏度降低、使用距離縮短的問題。進行此一改良的無線導版本MK-37 Mod0改稱為MK-37 Mod3,而相同改良之後的有線導版本MK-37 Mod1則稱為MK-37 Mod2,約在1967年交付服役。雖然經過升級,MK-37 Mod 2/3在淺海嚴重混響環境下的表現仍然不佳,無法在此種情況下探測到推進器沒有產生空蝕噪音的敵方低速潛艦,而對抗20節以上高速航行的潛艦的命中率也會降低到10%。由於這樣的限制,美國海軍不太願意在目標距離8000碼以外發射魚雷,寧可在接近到3000~4000碼才使用,也就是放棄了原先採用線導的增程效果。 MK-37使用第一代的銀鋅電池推進,電池推進的優點是噪音較低,可以減少對自身聲納尋標器的干擾(當時魚雷聲納尋標器技術還不夠好),且不需要向水中排氣,推進器工作不受海水背壓影響,在較大深度操作並不會導致射程與航速降低;然而,以當時的技術,各型電池的能量密度都不足,魚雷的體積也裝不下夠強大的電動推進器,因此電力魚雷的航速太慢且射程過低,只適合攻擊柴電潛艦,根本不可能應付能加速到30節的蘇聯核能潛艦 以及水面作戰艦艇 。 根據美方估計,MK-37大致還能勝任對付二戰以後新造的柴電潛艦(水下航速13至18節,潛航深度600至700英尺,最大潛深不超過1000英尺);然而,以20節的MK-37攻擊航速20節的潛艦,攻擊有效性(effectiveness)只有10% 。MK-37的攻擊深度設定1000英尺是基於美國海軍潛艦的設計標準(當時美國潛艦作業深度為700英尺,並預計在短期內提高到1000英尺),然而接下來預估潛艦的潛航深度會進一步提高到1300英尺(約400m),超出了MK-37的攻擊範圍。此外,雖然理論上MK-37可以攻擊水面與水下目標,但由於其主動聲納尋標器對抗從水面反射的雜波的能力仍然不足,如果攻擊水面目標時就不得不仰賴被動聽音模式,如此目標只要關閉主機或使用發出主機噪音的誘餌,就很容易讓MK-37丟失目標。再者,一開始作為純粹防禦反潛的MK-37直徑只有19吋,其戰鬥部威力較低(只有150kg),對付潛艦時威力尚可,面對大型水面船艦時就很難有決定性的威力;例如1974年日本一艘潛艦鳴潮號奉命以魚雷擊沈在東京灣上失火的油輪時,就發現MK-37威力過低,直接命中兩枚都無法擊沈目標。因為這些問題,美國海軍獲得MK-37魚雷之後,仍繼續保留二次大戰時代的MK-14與MK-16無導引直航反艦魚雷;MK-14與MK-16都擁有46節的最高航速,在此航速之下兩者射程分別是4500碼(4115m)以及11000碼(約10058m),兩者在美國海軍服役到1970年代。 MK-37的導引與搜索模式
MK-37魚雷的導引系統從在艦上發射後,分為以下數個階段: 2.左右繞圈(Circle L or R):如果目標潛艦距離較近,魚雷完成預啟動航行到起動尋標器時,可能就已經接近目標,甚至與目標位置重合。因此,可設定尋標器一啟動,就以預設深度往左或往右水平繞圈,使音響尋標器立刻進行360度掃描來尋找附近的目標。此種模式似乎只用於目標深度小於150英尺的環境。 3.深度搜索(Depth Search),在左/右繞圈模式的基礎上,從設定的起始深度以固定速率爬升,形成向上螺旋的航線,爬升到150呎深度時再重新下潛回到原先深度,然後重複向上螺旋的航線。此種模式用於魚雷設定深度大於150呎的情況,用意是敵方目標潛艦聽到魚雷接近時可能會下潛進行躲避,因此深度搜索模式可以從敵方潛艦的最大設計深度開始,然後往上搜索直到離水面150英尺,以擴大垂直搜索範圍。 4.目標獲得與接近(Acquisition and Close-In):當搜索階段音響尋標器探測到的目標主動或被動音響訊號強度超過預設門檻時(意味非常靠近目標),就會瞄準目標方向進入歸向(Homing)模式進行攻擊。進入歸向攻擊模式時,魚雷就會啟動以下設定: (1).MK-37 Mod2線導型魚雷的魚雷操控台指示燈開始閃爍,提醒射手魚雷已開始歸向攻擊。 (2).魚雷控制器將推進器轉向速率提高一倍,使魚雷跟上目標的角度變化率(目標潛艦可能進行緊急迴避機動);爬升速率也增加一倍。 (3).如魚雷還在低速巡航模式,就增加動力切換到高速模式,以配合前述提高轉向速率、爬升率的需求。
(4).將主動聲納尋標器的脈衝發射頻率增加一倍,提高目標資料更新率。 5.再攻擊(Re-Attack):假如目標獲得與接近階段魚雷尋標器失去目標訊號,就得重新搜索以再次攻擊。在重新搜索前,魚雷會先進入4.25秒的「擱置」(Hold in)模式,保持原有的航向與角度繼續搜索。MK-37 Mod 2在「擱置」時間截止時,會先讀取在攻擊階段發射艦送來的指令,依指示的航線運動;同時,魚雷操控台的指示燈也會停止閃爍,意味重新搜索。而如果沒收到過指令,或者是沒有線導的MK-67 Mod 3,則魚雷會直接往上、往右繞兩圈重新展開搜索,如果搜索不到就返回原深度重新進入繞圈。
從1960年起,美國開始發展能在水下高速航行的MK-48導向魚雷(使用熱力發動機),在1972年服役,隨即開始替換艦隊中的MK-37魚雷;不過剩下的MK-37直到1990年代初期才完全從美國海軍除役。 MK-37衍生應用: 1.用於MK-9水下特戰載具 MK-37可以裝載於MK-9水下特戰載具(SWA)上。MK-9是MK-7海豹小組輸泳載具(SEAL Swimmer Delivery Vehicle,SDV)的衍生型。MK-7是美國海軍第一種實用化的SDV,在1967年測試,1972年投入越戰在北越海域使用;MK-7編制一名駕駛,可搭載三名特戰人員,乘員艙為開放式設計,因此搭載人員都得穿著全套潛水裝備;MK-7 SDV使用鋅/氧化銀電池作為動力,後期型號還加裝導航聲納與都卜勒導航系統。潛艦透過額外加掛乾式掩體艙(SDD)搭載SDV,接近到近岸後,特戰人員透過潛艦的逃生艙口到船外,進入SDD艙,然後駕駛SDV出發前往目標區海岸線,完成任務後同樣搭乘SDV返回潛艦。而MK-9是以MK-7為基礎、在敵方港口攻擊停泊船隻或進行水下破壞的特戰載具,編制有一名駕駛員與一名導航人員,後部空間用來裝載一枚水雷、MK-37魚雷或炸彈,裝載MK-37魚雷的型號稱為「距外武器套件」。相較於MK-48魚雷,MK-37體積與重量相對較小,比較適合由MK-9載具攜帶。MK-9完成了作戰測試,但此計畫隨著美蘇冷戰緩和,在1989年遭到取消。 2.NT-37魚雷 MK-48出現並取代MK-37後,美國海軍與諾斯洛普(Northrop )在1968年起合作對庫存的MK-37進行大幅改裝,稱為NT-37,專門銷售給盟邦,在1970年代陸續出售給盟邦(歐洲國家、以色列、日本、加拿大等),但美國海軍本身沒有採用。NT-37以MK-46 324mm輕型魚雷使用的活塞熱力發動機(使用OTTO II燃料)取代原本的鋅銀電池推進,航速比MK-37增加40%,最大航速達到36節(此時射程為15000~18000碼,約13.7km~16.5km,比原本增加1.5倍以上),以23.7節速率航行時射程更達到40500碼(約37km),攻擊深度也有增加。由於航速大增,NT-37能以無導引方式直線攻擊高速航行的水面船艦。美國海軍也協助提升MK-37魚雷導引系統,對小型目標的探測距離可增加一倍(對大型目標探測距離不變);雖然如此,由於活塞熱力發動機運轉噪音高於電動馬達,更高的航速也意味魚雷本身螺旋槳噪音大增(因轉速增加、空蝕加劇),所以在淺海環境下尋標器探測效能反而比先前降低。NT-37第一種型號是NT-37C;之後,諾斯洛普又陸續更新NT-37的導引系統,NT-37D以半導體組件取代聲納處理器的類比零件;NT-37D採用數位化的導引系統,擁有半導體控制器,能使用軟體控制,核心為81086數位處理器,其主動模式探測距離增加了50~90%,被動探測距離增加100~200%。NT-37的最終型號是NT-37F。估計有諾斯洛普總共出口600枚NT-37給客戶,其中200枚是最終的NT-37F型。 3.MK-67機動水雷 在1978年,美國將若干MK-37改裝成MK-67潛艦用機動式水雷(Submarine Laid Mobile Mine,SLMM),在1983年正式部署,從1978年至1985年總共將899枚MK-37魚雷改裝為MK-67。MK-67保留MK-37魚雷的導航系統以及推進系統,換裝MK-13空投水雷的戰鬥部,以具備磁性/震動/水壓感應的「目標偵測裝置」(TDD,Target Detection Device)作為引信;此外,取消聲納,原空間用來裝置成輔助控制系統,電池也經過修改,能以更低的速率航行更遠的距離。MK-67發射後,導航系統依照預設航道前進,航行一定距離(根據螺旋槳運轉的圈數)之後切斷動力並沈入海底待命,當TDD感應到上方通過的船隻產生的信號(聲響、磁性、水壓等)就引爆;因此,MK-67只適用於淺海。 MK-67仍沿用原本MK-37的類比式電子零件,為了與1980年代核子攻擊潛艦(如後期型鱘魚級、洛杉磯級等)的數位射控系統相容,需要做一些數位-類比信號轉接。在1992年。有廠商建議為MK-67 SLMM換裝與NT-37系列魚雷相同的數位控制系統,使其能由軟體控制,並將檢修間隔從原本1.5年延長為6年,但此概念沒有獲得採納。 MK-67能部署在海峽、海灣、淺水域等敵方艦艇必經的咽喉點,或者直接進入敵方港口進行封鎖,其自行部署最遠約10海里;抵達部署位置後,MK-67能潛伏至海床,類似一枚沈底的感應水雷。MK-67隱蔽性極佳,而且能自行部署到位,負責佈雷的潛艦在同一處釋放就可以把水雷部署在周邊多個地方,敵方極難防範。 在冷戰中的戰爭演習中,美國海軍核能潛艦單位發現擁有自航能力的MK-67水雷是非常隱蔽而有效率的反潛方式,尤其是在對蘇聯、中國方面在太平洋一側的淺水近岸水域,這是憑藉美國的先天地理優勢以及美國陣營的地緣政治優勢。由於美國擁有太平洋的制海權,蘇聯在太平洋一側的反潛體系(無論海空力量或固定設施)勢力沒有深入太平洋(當時中國海上監視與反潛體系幾乎不存在),因此美國海軍核能攻擊潛艦能沒有顧忌地在太平洋高速渡航直衝中國淺海地區而不用擔心製造的噪音被遠程探測(蘇聯只能在依托近岸的反潛探測體系探測到接近時的美國核能攻擊潛艦,預警時間很短),快速抵達蘇聯及中國潛艦進入太平洋所必經的狹窄水道並部署MK-67自走水雷,水雷專門鎖定特定的蘇聯潛艦聲紋,一旦蘇聯潛艦試圖穿越水道就可能觸發水雷而遭到攻擊。在21世紀初期,中國海上勢力崛起,但中國海軍水面艦隊以及核能潛艦進入西太平洋,仍然必須穿越與日本、台灣、菲律賓(都是美國盟邦或準盟邦)等第一島鏈之間的特定狹窄水道,美國核能潛艦快速部署諸如MK-67之類的感應式自走水雷,就有很大的發揮空間。
美國海軍曾打算發展更新型的SLMM來替換MK-37,但冷戰結束後軍費緊縮,原本用MK-48改裝成SLMM的計畫被取消,所以仍保留部分MK-67水雷。最後一種能裝備MK-67水雷的攻擊潛艦是洛杉磯級,美國海軍並沒有為後續維吉尼亞級核子攻擊潛艦上數位化程度更高的系統來整合MK-67。
MK-45星式核彈頭魚雷
美國大西洋鱈魚號(USS Torsk SS-423)紀念潛艦的魚雷艙,左側的綠色魚雷 就是MK-45星式核子魚雷。
在1950年代美國推出核子潛艦時,也預估蘇聯隨後就會推出能持續在水下高速航行的核能潛艦 。雖然當時直航魚雷的航速已經可以達到45節以上,但同時期的魚雷導引系統根本無法在這樣航速帶來的噪音之下有效工作(此時美國各型導向魚雷航速都在27節以下,無法追擊能輕易在水下以25節左右持續航行的核能潛艦 )。 在1956年11月,美國國家科學院(National Academy of Sciences)的水下作戰委員會(Committee on Undersea Warfare,CUW)發佈諾布斯卡( Nobska)報告,針對未來蘇聯潛艦威脅以及水下作戰趨勢提出建議,而美國海軍也據此展開魚雷重整研究計畫(Research Torpedo Re-Configuration,RETORC )來檢討當時美國海軍的魚雷需求,對付潛航深度與航速日益增加的蘇聯潛艦。「諾布斯卡」報告建議美國海軍採取兩種路線: 在長期而言,需要提高魚雷推進系統與導引系統的性能,發展擁有更大航速、操作深度、射程的新型潛射導向魚雷,能有效對付高速、大潛深的蘇聯核子潛艦;然而,以上需要大量的技術突破才能實現,並非一蹴可幾。因此, 「諾布斯卡」報告建議,美國海軍在短期內先開發兩種搭載核子戰鬥部的反潛武器,分別以火箭和魚雷作為載具,與會的「氫彈之父」愛德華.泰勒(Edward Teller)就支持此一構想;面對高速核子潛艦時,從反潛武器射出到抵達目標區域時,核能潛艦已經在水下移動一段距離(30節航速的核能潛艦,2分鐘就能移動約1英里),而只有核子武器的廣大殺傷半徑才能克服這樣的距離(事實上,麻省理工學院在1950年就建議發展低當量核子深水炸彈進行反潛作戰,以避免蘇聯潛艦憑藉數量優勢保合併穿透艦隊或運輸船團的反潛網)。因此,當時美國海軍發展兩種潛射核子武器,分別是UUM-44潛射反潛火箭(SUBmarine ROCket,SUBROC),以及MK-45星式(Anti-Submarine TORpedo,ASTOR) 線導核子魚雷。SUBROC主要是在時間緊迫的情況下,攻擊距離在第一匯聚區(約35海里)的目標,在這種距離下反潛火箭點火升空的噪音很難被敵方察覺;而ASTOR核子魚雷則用來對付距離較近(約15000碼以內)的目標。 原本「諾布斯卡」報告建議美國海軍以現有的魚雷為基礎,結合當時正在發展的MK-101 Lulu輕型核子深水炸彈的W34核子戰鬥部,快速生產100至200枚核子魚雷來滿足當前的需求;然而,美國海軍武器局(BuOrd)仍決定從頭發展一種新魚雷來配合W-34戰鬥部,就是MK-45星式魚雷。 MK-101 Lulu是美國海軍第二代核子深水炸彈,項目在1954年啟動。美國海軍第一代核子深水炸彈是1951年參謀聯席會議批准開發的ALIAS,型號為MK-90 BETTY,以先前供戰鬥轟炸機攜帶的MK-7輕型原子彈為基礎開發,重2500磅(其中1234磅是耐壓殼),戰鬥部威力相當於3萬噸TNT,設計上是在2000呎深度引爆,利用水下震波破壞敵方潛艦的水密性。MK-101 Lulu的核子戰鬥部是W-34 Python,是以直徑20吋、重1500磅的MK-28/TX-28戰術核彈進一步發展而來;W-34進一步將直徑縮減到18吋,重量不超過300磅。原本TX-28是二級(Two Stage)核武(即氫彈),第一級先引爆產生核分裂,並以其高溫高壓啟動第二級來產生核融合反應,當量相當於百萬噸級;而W-34則是單純的核分裂武器,只有第一級,爆炸當量縮減到1.5萬噸。W-34具有水壓(Hydrostaic)引信,依照特定深度的水壓來引爆。MK-101 Lulu由於縮小體積,S-2F追蹤者反潛機可以攜帶兩枚(如果是第一代的MK-90就只能攜帶一枚) 。此外,MK-101的結構強度可承受水面衝擊,不像MK-90還需要減速傘來減緩落水速度,意味著MK-101投擲後能更快入水,縮短抵達引爆的深度的時間。 星式魚雷的研發工作從1957年11月開始(屬於緊急開發計畫),在1959年研發完成並開始評估,在1960年夏季在剛服役的飛魚級核能攻擊潛艦天蠍座號(USS Scorpion SSN-589)進行測試評估,1961財年批准服役,1963財年正式交付美國海軍服役。 MK-45 Mod.0星式核子魚雷直徑為19吋(483mm),雷體長5.71m(比MK-37常得多),重1057kg,採用 一具出力160馬力的鎂/鋁化銀海水電池馬達推進,最大射程約11000~15000碼(10~13.65km),最大航速約40節 ,這可說是海水電池能夠提供的最高航速。MK-45發射後會來到100英尺深度(約30.5m),等到加速到27節以後啟動積分電路計算魚雷航行;而當MK-45魚雷加速到40節以上後,會再上升或下潛到發射前預定的引爆深度,設定範圍介於100至1000英尺(30.48~304.8m)之間,可殺傷在深度2000英尺(約610m)潛航的潛艦。MK-45 Mod0配備一枚W-34核子戰鬥部,當量約11KT。由於當時聲納尋標器無法在40節航速之下有效工作(聲納尋標器會被流體噪音以及魚雷自身的發動機噪音遮蔽),因此星式魚雷沒有攜帶任何自導尋標器,完全由潛艦透過導線下達指令來控制,而使用星式魚雷的潛艦則需安裝專用的MK-18類比式自動射擊解算裝置。 MK-45魚雷發射後會先爬升或下潛到100呎深度,待速度達到27節後啟動速度積分電路來計算距離。當魚雷加速到40節之後,會再爬升或下潛到指定深度,深度可設定在100~1000呎之間。MK-45魚雷也具有反繞圈電路,以避免魚雷掉頭危及發射艦。 此外,MK-45魚雷沒有配備一般的接觸式或磁感應引信,完全由潛艦透過導線傳輸引爆指令,因此星式魚雷的線導系統有兩個頻道,一個用於魚雷航行遙控,另一個用於下達引爆指令。這樣的設計可降低核子戰鬥部意外引爆或引爆失敗的機率,然而這也意味潛艦仍需要具備相當的測距能力,引導星式魚雷靠近目標到核子戰鬥部的殺傷半徑以內,然後以遙控方式引爆。 作業時,使用星式魚雷與SUBROC潛射反潛火箭的潛艦以被動聲納監聽為主;星式魚雷以40節的航速,要攔截30節的潛艦而言仍不夠快,所以美國海軍認為應避免使用主動聲納拍發,使目標警覺遭到攻擊而加速逃逸,導致MK-45魚雷無法追擊。因此,最初美國海軍希望透過核子戰鬥部增強威力來彌補反潛射控系統的誤差,但實際上搭配SUBROC與星式魚雷的潛艦仍需要擁有相當精確的被動聲納測距能力,單純依靠被動探測的目標動態分析(TMA)來獲得測距資料 ,避免主動聲納拍發讓敵方警覺。美國海軍在1950年代後期進行被動式水下射控聲納可行性研究(Passive Underwater Fire Control Feasibility Study,PUFFS),在1960年代推出實用化的BQG-4 PUFFS聲納系統,部署在Guppy III、刺尾魚級等柴電攻擊潛艦上,理論上有效工作距離長達20000碼,足以支持MK-45魚雷的到最大射程,其方位測量精度高達0.1度,測距誤差為5%,相當於在Mk 45的12000碼最大射程上時誤差600碼。然而,PUFFS在新型淚滴型艦體的長尾鯊級(Thresher class)核能攻擊潛艦上的測試結果並不理想(因為淚滴型艦體的背部不再是直線,使得PUFFS的三個聽音器無法維持直線基線),使得美國海軍放棄在之後新造核能攻擊潛艦上部署PUFFS的計畫。這使得美國海軍最新型核能攻擊潛艦缺乏配合星式魚雷的精確被動射控聲納系統,而擁有PUFFS系統的則卻是不適合對抗蘇聯核能潛艦的柴電攻擊潛艦。 星式魚雷的使用限制甚多,由於採用威力強大的核子戰鬥部,美國海軍潛艦部隊普遍對這種武器反感,認為星式魚雷是一種「同歸於盡」的武器,爆炸威力將同時擊沉目標與自身,在大多數戰術情況下並不好用;不過實際上W-34的當量不大(僅11KT),殺傷半徑大概只有1海里,而且實際服役後都將最低引爆距離射置在離發射艦2050碼(1874m,約略為1海里)來保障發射艦的安全,然而這仍難以消除美國潛艦部隊人員的疑慮。而且萬一航行途中導線故障或斷落,魚雷 與上面昂貴的核子戰鬥部就會平白損失。 在1970年代,設計來追擊高速核能潛艦的MK-48重型導向魚雷服役後,由於實用性良好,MK-45就失去了存在的必要,因此這種核子魚雷在1976年從美國海軍除役;剩下的MK-45魚雷 由西屋(Westinghouse)公司進行改裝,以MK-102傳統高爆戰鬥部取代核武,加裝一個尾流歸向(Wake Homing)尋標器(一個朝上的被動聲納)而成為MK-45 Mod1自由式魚雷(Freedom Torpedo),當時打算銷售給其他盟邦,不過最後並沒有獲得訂單;自由式魚雷曾一度有希望出口土耳其,但1974年土耳其入侵北賽浦路斯後此案告吹。換裝傳統高爆戰鬥部之後,MK-45 Mod 1/3長度與重量略有變化,長5.766m,重1004kg。
SUBROC潛射反潛火箭
SUBROC反潛火箭點火升空的瞬間。 1956年,探討未來反潛作戰的諾布斯卡( Nobska)會議建議,首先發展裝備兩種核子戰鬥部的反潛武器,來對付能在水下高速移動的核能潛艦,作為高速導向魚雷技術發展成熟前的過渡性武器;這包括UUM-44潛射反潛火箭(SUBmarine ROCket,SUBROC),以及MK-45星式(ASTOR) 線導核子魚雷。 SUBROC主要是在時間緊迫的情況下,攻擊距離在第一匯聚區(約35海里)的目標,在這種距離下反潛火箭點火升空的噪音很難被敵方察覺;而ASTOR核子魚雷則用來對付距離較近(約15000碼以內)的目標。SUBROC從魚雷管發射後浮出水面點火升空,依靠慣性導航飛行到預設的目標區並釋放一枚核子深水炸彈 ,下沈到預定深度並引爆。 SUBROC全長約6.7m(22英尺),發射重量1800kg(4000磅)、直徑533mm,搭載一枚當量1~5KT的W55核子深水炸彈(直徑350mm,重213kg),飛行距離約55km(35海里左右),被美國海軍視為能從魚雷管發射的「迷你北極星彈道飛彈」。美國海軍也曾考慮讓SUBROC搭載在空中引爆的核子戰鬥部,用來攻擊一整個區域的水面船團。 SUBROC反潛火箭在1965年服役,配套的W55核子深水炸彈在1968年生產完畢(總共生產285件),服役期間曾裝備75艘美軍核子潛艦 ,依靠艦上的大型被動聲納(包括艦首球型聲納、拖曳陣列聲納等)與計算機進行射控解算。在1989年 ,SUBROC因為美蘇核武限制條約而退役。
美國海軍在1980年代發展的UUM-125海矛潛射反潛火箭想像圖,原本預計取代UUM-44 SUBROC 美國海軍曾在1980年代發展UUM-125海矛(Sea Lance)反潛火箭來取代UUM-44潛射反潛火箭以及水面艦的ASROC反潛火箭 ,能由潛艦533mm魚雷管或水面艦MK-41垂直發射器發射,波音在1982年獲得合約成為主承包商。UUM-125全重約1400kg(3086磅),全長6.25m,直徑533mm,由潛艦上的MK-117數位射控計算機提供射擊解算;UUM-125以EX 116 Mod 0火箭發動機推進,飛行速率1.5馬赫,飛行距離很長,中途採用慣性導航,飛抵目標區後釋放戰鬥部;潛射型UUM-125封裝在一個膠囊容器中,從魚雷管射出後浮出水面,才點燃火箭發動機升空。UUM-125最早發展的型號是UUM-125A,搭載一枚W89核子深水炸彈(重147kg,直徑338mm,當量200KT,有效殺傷半徑10km),射程185km(100海里);在1980年代中期,美國海軍又決定發展搭載MK-50輕型魚雷的版本,稱為UUM-125B,射程降至65km,此後美國海軍就決定取消UUM-125A核武版本。在1986年,美國海軍與波音簽署UUM-125的全規模開發合約,在1988年恢復了水面艦發射的型號。然而由於美蘇冷戰全面緩和,海矛反潛火箭計畫在1990年取消。
|