AN/SPY-1 3D相位陣列雷達
提康德羅加級飛彈巡洋艦 鍛谷號(USS Valley Forge CG-50),艏艛上的板狀物就是SPY-1A相位陣列雷達的天線。

提康德羅加級飛彈巡洋艦羅伯特.史莫斯號(USS Robert Smalls CG-62, ex-USS Chancellorsville)
前部船樓與其上兩座AN/SPY-1B相位陣列雷達,艦橋後方裝有兩座AN/SPG-62照射器,主桅杆上
有一部在2010年代升級時換裝的AN/SPQ-9B X斷雷達。攝於2025年8月30日橫須賀基地。

羅伯特.史莫斯號(USS Robert Smalls CG-62, ex-USS Chancellorsville)後部船樓的AN/SPY-1B
相位陣列雷達,上面有兩部AN/SPG-62 X波段照射器。攝於2025年8月30日橫須賀基地。

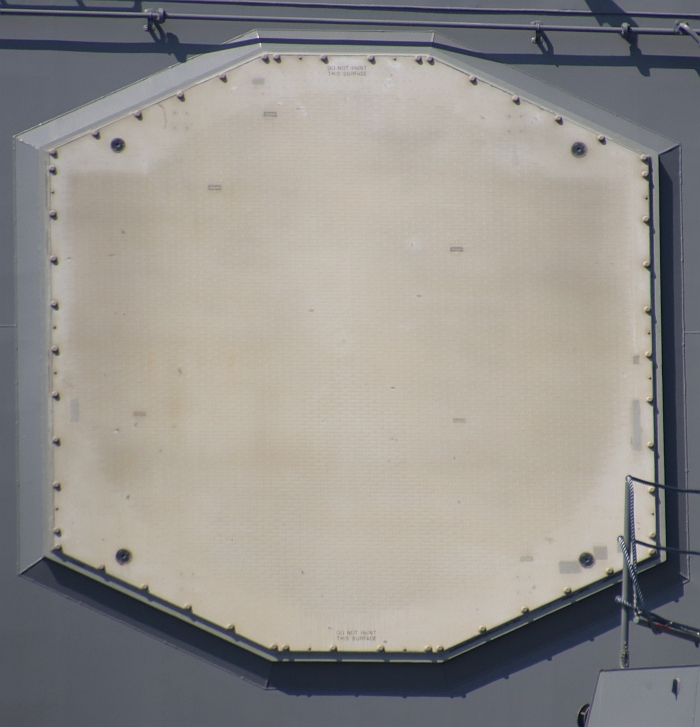
提康德羅加級飛彈巡洋艦安提坦號(USS Antietam CG-56)直昇機庫上方的兩面SPY-1A相位陣列雷達。
提康德羅加級的四面SPY-1A相位陣列雷達分為兩組,分別設置在前部船艛與後部船艛頂,
每組的兩個SPY-1A陣面共用一套雷達發射機(因此全艦有兩部SPY-1A的發射機)。

建造中的提康德羅加級 的蓋茨堡號(USS Gettysburg CG-64)的1號雷達室,可以看到艙壁安裝
一個AN/SPY-1B相位陣列雷達陣面。此時該艦工程進度約70%。

柏克Flight 1飛彈驅逐艦希金斯號驅逐艦(USS Higgins DDG-76),2023年10月13日攝於橫須賀。
伯克級的SPY-1D雷達系統將四個天線陣面集中於前部船艛上 ,共用同一套雷達發射機,
比SPY-1A減少一套。 柏克Flight 1、2(DDG-51~78)的前、後SPY-1D天線陣面安裝在同一高度。

柏克Flight 2A飛彈驅逐艦拉菲.強森號(USS Ralph Johnson DDG-114)的船艛,攝於2023年10月14日橫須賀。
相較於柏克Flight 1,柏克Flight 2A後部 增加了機庫結構,因此朝後的兩部SPY-1D相位陣列雷達的安裝位置
比前部抬高一些;為此,美國為SPY-1D開發了曲折導波管技術。

柏克級Flight 2A飛彈驅逐艦的偉恩.梅耶號(USS Wayne E. Meyer DDG-108)的後部SPY-1D(V)相位陣列雷達。
值得一提的是,偉恩.梅耶少將是原本神盾計畫的主管,偉恩.梅耶號則是美國建造的第100艘神盾艦艇。

柏克級飛彈驅逐艦穆斯汀號(USS Mustin DDG-89)的前部AN/SPY-1D(V)相位陣列雷達天線。
攝於2015年5月新加坡國際海事防務展(IMDEX 2015)。

柏克Flight 2A飛彈驅逐艦威廉.勞倫斯號(USS William P. Lawrence DDG-110)的後部AN/SPY-1D(V)
相位陣列雷達。攝於2019年5月新家坡國際海事防務展(IMDEX 2019)。

柏克Flight 2A飛彈驅逐艦杜威號(USS Dewey DDG-105)的後部AN/SPY-1D(V)相位陣列雷達。
攝於2025年5月7日新加坡國際海事防務展(IMDEX 2025)
日本金剛級飛彈驅逐艦霧島號號(DDG-174)前部的SPY-1D相位陣列雷達。攝於2025年8月

日本摩耶級飛彈驅逐艦摩耶號(DDG-179)的左後部SPY-1D(V)相位陣列雷達。
攝於2023年10月13日橫須賀軍港。日本愛宕級、摩耶級由於後部設置直昇機庫,所以後部兩面
SPY-1D(V)相位陣列雷達設置位置提高,與美國柏克Flight 2A類似。

生產線上的SPY-1D相位陣列雷達天線,每個天線陣列總共有4480個相移器。

(上與下)在2020年11月下旬,維修中的柏克Flight 2A飛彈驅逐艦奧斯卡.奧斯汀號(USS Oscar Austin DDG-79)
正為艦橋又前方位置安裝一面AN/SPY-1D(V)相位陣列雷達天線。


(上與下) 挪威南森級飛彈巡防艦羅爾德.阿蒙森號(HNoMS Roald Amundsen F311)的SPY-1F相位陣列雷達
,安裝在塔狀結構上。攝於2025年8月24日日本橫須賀。SPY-1F是SPY-1系列的縮小版,適用於較小的巡防艦。


|
SPY-1雷達各衍生型比較 |
|||||||
| 型號 | SPY-1A | SPY-1B | SPY-1D | SPY-1D(V) | SPY-1F | SPY-1F(V) | SPY-1K |
| 製造國/製造商 |
美國/洛克西德.馬丁 |
||||||
| 用途 |
對空搜索/追蹤/武器導控(有限度) |
||||||
| 天線形式 |
平板固定式相位陣列天線X4 |
||||||
| 操作波段 |
S(E/F): (3100-3500 MHz) |
||||||
| 尖峰功率 |
4~6(MW) |
||||||
| 平均功率 |
32KW |
58KW | 58KW | 77~111KW | |||
| 陣列天線尺寸(m) | 3.84X3.67 | 3.65X3.65 | 3.65X3.65 | 3.65X3.65 | 2.43X2.43 | 2.43X2.43 | 1.67X1.67 |
| 單一陣面的收/發單元數量 | 4096(另有256個純接收單元與128個輔助單元) | 4350 | 4350 | 4350 | 1856 | 1856 | 912 |
| 波束寬度(度) | 1.7X1.7 | ||||||
| 最大偵測距離(km) | >325 | 約320 | |||||
| 探測掠海目標距離 | >80 | ||||||
| 脈衝回覆頻率(pps) | 可變動 | ||||||
| 特點 | SPY-1A的改良版,重量減輕。性質與SPY-1A相同。 | SPY-1A/B的降低重量版,四面天線共用一具發射機。性質與SPY-1A/B相同。 | SPY-1D的改良版,增強近岸與陸地的低空操作能力與電子反反制能力 | 低價位輕量版,體積縮小,多功能。專供外銷用。 | SPY-1F的改良版,增強近岸與陸地的低空操作能力與掠海反艦飛彈偵測能力。 | 超輕量版,體積價位較SPY-1F進一步縮小。 | |
| 適用艦種 | 七千噸以上的大型巡洋艦/驅逐艦 | 七千噸以上的大型巡洋艦/驅逐艦 | 七千噸以上的大型巡洋艦/驅逐艦 | 七千噸以上的大型巡洋艦/驅逐艦 | 航母、五千五百噸以上的驅逐艦/巡防艦/兩棲作戰艦艇 | 航母、五千五百噸以上的驅逐艦/巡防艦/兩棲作戰艦艇 | 中小型巡防艦 |
| 使用艦艇 | 美國提康德羅加級(CG-47~58) | 美國提康德羅加級(CG-59~73) | 美國柏克級Flight1/2(DDG)、日本金剛級(DDG)、西班牙F-100艾爾瓦洛.迪巴贊級(DDG) | 美國柏克級Flight2A(DDG)、日本愛宕級(DDG)、南韓KDX-3(DDG) | 挪威F-85南森級(FF) | ─ | ─ |
參考資料:尖端科技211、212─新世代艦載相位陣列雷達與21世紀防空艦(張明德著)
APL CONTRIBUTIONS TO AEGIS──by EDWARD P. IRZINSKI
AEGIS: ADVANCED SURFACE MISSILE SYSTEM──by JAMES D. FLANAGAN and WILLIAM N. SWEET
──by captain Picard
|
全世界第一種實用化艦載相位陣列雷達──革命性的AN/SPY-1是為神盾(AEGIS,另有專文介紹)艦載作戰系統發展而來的,可提供神盾艦艇所需要的強大偵蒐與射控能力。 AN/SPY-1系列的主承包商為美國無線電公司(Radio Corporation of America,RCA),後來RCA由於經營不善,被通用電機航太公司(GE Aerospace)購併成為其雷達電子部門;在1993年,GE集團將GE Aerospace以30億美元的價格賣給馬丁.馬里塔(Martin Marietta),馬丁.馬里塔與洛克西德集團(Lockheed Corporation)合併為洛克西德.馬丁集團(Lockheed Martin,簡稱洛馬),因此SPY-1雷達現在是洛馬 集團的產品。 除了RCA外,AN/SPY-1其他次承包商包括美國ALS電子公司(ALS Electronics)、計算機科學公司、利頓(Litton)工業公司、雷松(Raytheon)公司 (提供雷達發射機) 、德利台公司(Teledyne Corp)、聯合公司(Unisys Corp)等,整個研發記畫的主管單位是美國海軍海上系統司令部 ;在整個神盾系統與SPY-1相位陣列雷達研製過程中,約翰.霍普金斯大學應用物理實驗室(Johns Hopkins University Applied Physics Laboratory,APL)也作為美國海軍重要的技術諮詢者,負責審查承包商設計、發展關鍵技術以及改進系統設計等。 關於相位陣列雷達原理的介紹,請見「相位陣列雷達概述」一文。 概念研究階段:先進多功能陣列雷達(AMFAR) AN/SPY-1相位陣列雷的起源可追溯到1963年底美國國防部展開的先進水面飛彈系統(Advanced Surface Missile System,ASMS,是Typhon防空系統取消後的替代計畫),搭配的先進相位陣列雷達系統在初期概念階段稱為先進多功能陣列雷達(The Advanced Multi-Function Array Radar,AMFAR);在1967到1970年,AMFAR是ASMS的核心項目(ASMS在1969年底正式改稱為AEGIS神盾系統)。先前被取消的提豐計畫打算使用的SPG-59多功能追蹤/射控雷達 (另有專文介紹)採用倫伯電磁透鏡天線,後端發射機為併聯小型TWT發射機;而到AMFAR時代由於電子技術日漸成熟,因而改用相移器構成的相位陣列天線 ,後端也改用併聯的正交場放大器(Crossed Field Amplifiers,CFA)。AMFAR是種逐個脈衝收/發(pulse-by-pulse transmit/ receive),所有的波束收發操作都由後端數位計算機控制。
先進多功能陣列雷達(AMFAR)由APL主導開發,為AN/SPY-1奠定了技術基礎。 約翰.霍普金斯大學應用物理實驗室(APL)負責研發AMFAR項目所需的各種關鍵技術,確保它們能充分支援工程發展與演示,並滿足雷達系統的各種作戰需求,包括監視、追蹤、導引防空飛彈接戰等,並且能在強烈電子干擾環境下有效運作,同時還要滿足可維護性與可獲得性。AMFAR的關鍵項目與概念發展包括: 1.雷達發射機(transmitter)所需的正交場功率放大器(CFA)
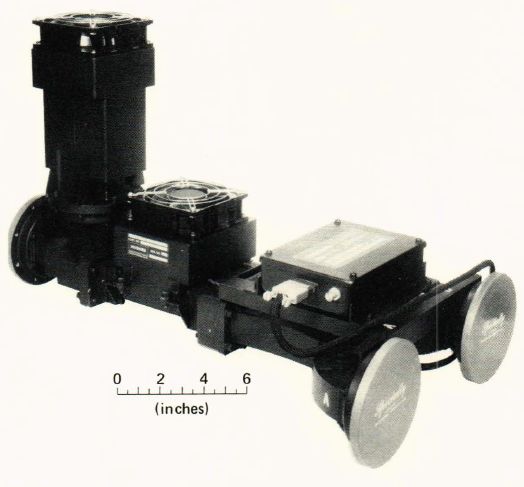
AMFAR的正交場功率放大器(CFA),這是雷達發射機的基本組件。
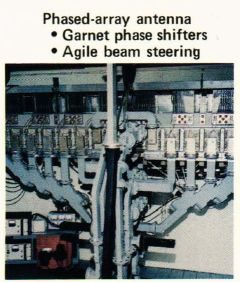
2.CFA的序列調節(series regulator)控制技術,維持目標動態指示(MTI)的穩定性 3.天線陣面上控制輻射單元相位的滯後迴路閉鎖(hysteresis loop latching)鐵氧體相移器(Ferrite phase shifters),使用亞鐵磁性石榴石(Ferrimagnetism Garnet)製造,能承受運作時的高溫。
AMFAR研製階段的的相移器 4.平面相位陣列雷達設計 5.用來提高電子反反制能力的波形產生與處理技術 6.在各種複雜背景環境下的自動目標捕捉與追蹤能力 7.對每個波束個別控制的計算機技術
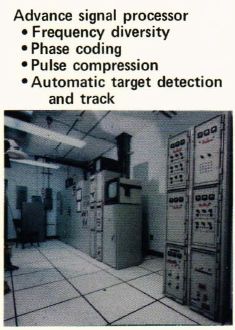
AMFAR後端的信號處理機櫃 8.自動測試功能 9.自動化故障隔離與重組,使得部分元件失效也不會影響整個雷達運作。
1.研製雷達發射機測試工作的相干測試組件
為了確保全系統達成所需的高功率,並且增加系統可靠度(既使一部分組件失效或受損,整個雷達系統仍能在降級狀態下繼續運作),設計AMFAR端發射機時,選擇了由較多正交場功率放大器(Crossed
Field Amplifiers,CFA)併聯而成的方案(被捨棄的方案中包括由數量較少的CFA構成的方案);多個CFA真空管輸出的脈衝的向量加總,形成整個發射機的高功率單一脈衝輸出。然而,由於有許多CFA組件平行併聯,不同CFA之間產生的內脈衝振幅(intrapulse
amplitude)以及相位穩定性(phase
stability)就有許多顧慮;尤其是AN/SPY-1A基於操作需要,會在多種不同波形與脈衝長度之下操作,導致問題變得更為複雜。對於AN/SPY-1A這樣的相位陣列雷達系統,必須非常精確地控制脈衝之間的相位干涉(Pulse-to-pulse
coherence),才能根據信號準確判斷目標的距離與速率等參數。 2.雷達發射器簡化工程
APL為ASMS研製的高速波導開關,使得兩組天線陣面能以分時方式共用單一發射器, 可有效減低系統體積重量。 在ASMS早期研發階段,打算為每一個 相位陣列天線設置一組專屬的高功率微波發射組(high-power microwave transmitter assembly),四個天線陣面就需要四組發射機。而擔任技術諮詢的約翰霍普金斯大學應用物理實驗室(Johns Hopkins University Applied Physics Laboratory,APL)審查之後就設法簡化系統,透過一組高功率微波開關(high-power microwave multiswitch)讓兩個天線陣面共用同一組高功率微波發射機;此種設計透過波導開關(waveguide switches capable),讓微波發射機以分時(timeshared)方式輪流對兩個天線陣面輸出射頻能量。在當時,微波產業還沒有現成技術可以滿足這種高速波導開關的需求(需要在要求的高功率下快速可靠地切換),因此就由應用物理實驗室主導研究這種裝置,並委由幾個承包商進行設計工作,並由APL進行實驗與評估。最後,APL完成了這種波導開關的可行性研究。由於波導開關切換速率極快,兩個陣面共用發射機並不會使性能消減,但這對於簡化雷達系統頗有幫助,為神盾系統日後持續減重、降低成本奠定良好基礎。在1974年裝上諾頓灣號(USS Norton Sound AVM-1)實驗艦的神盾武器系統一號工程原型(EMD-1)中,SPY-1A相位陣列雷達就用上了此種高速波導開關的生產型。
3.信號處理器、計算控制單元簡化 4.改進標準防空飛彈上/下鏈傳輸 SPY-1A相位陣列雷達兼具為標準SM-2防空飛彈提供雙向資料溝通(上鏈傳輸、下鏈接收)的功能,然而在早期SPY-1A與標準SM-2飛彈的整合測試中發現一些問題,飛彈接收SPY-1A雷達上鏈(up link)傳輸時在部分情況下受到影響,包括在遭到敵方電子干擾時,或者在某些雷達波形扭曲的特定狀況之下。這個問題也由APL負責研究,測試之後確認上鏈接收裝置對於電磁波形變化與干擾過於敏感,隨後APL發展出最佳化的上鏈接收信號處理演算法,再搭配改進後的傳輸硬體進行測試。經過軟、硬體改進的上鏈接收器性能大幅增加,使得標準SM-2在波束扭曲以及強烈電子干擾環境下,仍能與SPY-1A相位陣列雷達有效進行傳輸溝通;而APL主導設計的改進型上鏈傳輸接收器也被納入量產型的標準防空飛彈。
SPY-1A技術簡介 SPY-1屬於被動式相位陣列雷達 ,採用S(E/F)波段(E頻:波長10~15cm:F頻:波長7.5~10cm)操作(3100~3500MHz),對空探測距離大於325公里,最大有效探測距離據約450km(大型的SPY-1A/B/D),能夠同時追蹤大量目標,並以分時的方式同時支援為標準SM-2防空飛彈進行中途導引。雷達控制系統也能執行一些特殊工作,例如在惡劣的天候追蹤目標與進行電子反反制(ECCM)。相較於波長較短的C、X波段,S波段由於波長較大,在大氣中的損耗較慢,傳遞距離較遠,但鑑別度也比較差 ,需要更大的天線孔徑才能達到射控等級的精確度,先天上就很難放入直徑有限的飛彈。 美國海軍從早年的3T到標準、海麻雀等半主動雷達導引艦載防空飛彈,都採用波長較短、精確度高的X波段(波長3~3.75cm),無法直接與SPY-1雷達的S波段匹配;因此,防空飛彈進入終端照明階段時,需要由SPG-62 X波段照射器負責照射工作。 值得一提的是,由於SPY-1雷達本身的追蹤精確度相當高,已經滿足射控等級的需求,因此由中途導引轉換至終端照射階段時,是由SPY-1直接指揮MK-99飛彈射控系統,將SPG-62 X波段照射器朝向特定方向(目標與飛彈對應方位)進行照射;此種照射模式被稱為指揮照明(Direct Illuminators)或樸役照明(Slave Illuminators),SPG-62只是個X波段照明波發射器而非真正的射控雷達,沒有雷達接收處理端。反觀美國海軍較早期的非神盾防空艦艇,由於配套的SPS-48E三維頻率掃描雷達精確度不足以達到射控級,飛彈進入終端照射階段時,只能給配套的MK-74飛彈射控系統(使用SPG-51D照明雷達)粗略方位提示,接著SPG-51D照明雷達還必須在提示方位重新搜索、捕捉到在空飛彈與目標,然後才能進行終端照射。 AN/SPY-1由相位陣列天線、發射機組、信號處理組、雷達控制器等部件構成。波源在AN/UYK-7(後期改成UYK-43)數位計算機的控制下產生射頻能量, 經過發射機的高功率射頻放大器放大之後,透過高速波導開關輪流輸入各天線陣面(SPY-1A/B為兩組天線共用一部發射機,SPY-1D則為四組天線共用同一部發射機); 此時,波束控制器根據計算機傳來的波束控制指令,產生陣列天線的移相指令,使發射機射頻輸出透過天線陣面,在空中形成所需要的波束。系統能 根據搜索、追蹤和飛彈中途傳輸等不同要求, 控制天線以同時或分時產生不同功率、相位、波束寬度、脈衝寬度和脈衝回復頻率的多種波束。雷達回波信號由陣列天線進入接收機的和通道與兩個差通道, 在射頻前置放大器內放大,再經變頻並放大後送至信號處理器,進行恆虛警與脈衝壓縮處理,最後得到目標距離、方位、高度與其他必要的資訊。 如果使用消除雜波的模式,在搜索和追蹤時可採用動態目標顯示處理。AN/SPY-1雷達的「搜索計畫與雷達資源管理」包括決定雷達波束在豪秒級的掃描區間該指向哪裡,以及根據當前威脅優先等級,分配雷達發射機的占空比(Duty Cycle),確保高威脅目標獲得更多的追蹤能量等等,這些都由UYK-7/43主電腦負責計算與下達指令。 AN/SPY-1雷達系統採用四面平板狀八邊形固定式相位陣列天線,每面天線涵蓋90度方位角,因此採用四面就能全時間涵蓋所有的方位角;電腦負責控制平板天線上 相移器的運作,進而控制雷達波束的功率、指向與波形等。純就性能而言,採用四面固定式陣列天線能全時間涵蓋360度方位角,擁有最佳的目標更新率;但同時配置四面陣列天線的體積、重量、成本較高,而且由於雷達天線必須盡量放在船艦高處來獲得較長的水平線探測距離,四個天線陣面連同發射機都要放在船艛高層,導致上部重量升高、重心不穩,整艘船艦的體積與排水量都要放大才能平衡。歐洲國家在1990年代到2000年代陸續研發的相位陣列雷達如英國的Sampson與法、義合作的EMPAR分別使用雙面與單面式平板陣列天線,放在旋轉基座上以涵蓋360度方位角,這種配置的成本較低、天線重量較小,而且可以放在船艦桅杆最高處,但如此目標更新速率也比較差,連帶也減少了為防空飛彈上鏈傳輸時的更新速率。 SPY-1能在極短時間內完成監視空域內的掃瞄,目標更新速率極快 ,擁有極佳的多目標搜索/追蹤能力。此外,由於要波束指向的改變相當靈敏快速,目標反射信號的相位角出現變化時雷達便能立刻得知,並在瞬間改變波束指向, 從而繼續將目標鎖定於波束範圍內,因此目標就算高速運動且採取劇烈閃避也很難擺脫。SPY-1A的運作方式如下:以一道波束對85公里以內、水平線以上的空間半球不間斷搜索 任何空中或掠海飛行目標,另外間歇性對325公里半徑內的空間半球內進行掃描(早期SPY-1A由於計算機能量有限,只能每分鐘數次對300公里外的空域進行掃描;爾後由於後端處理能量日漸成長,SPY-1就能持續對遠程空域進行監視)。一旦發現可疑目標,雷達便於一秒鐘之內對該目標方位再發送出數次波束進行密集追蹤 ,並於極短的時間內描繪出目標軌跡;傳統旋轉天線雷達由於波束角寬,解析度差且功率較低,需要旋轉數圈(通常是三圈以上)才能達到此目的,而SPY-1則可在傳統雷達 天線旋轉一圈的時間以內就進入目標追蹤狀態。測得目標的距離、高度、速度和方向等資料之後, 經過神盾系統的電腦處理之後,適合的防禦性反應措施便會自動選擇出來,接下來就由神盾系統操控艦上武器與射控雷達進行接戰。以往美國海軍的旋轉式對空搜索 雷達由於精確度不足,僅能提供目標概略方位給防空作戰系統,因此導控飛彈的照明雷達在進入照明導控前還是得浪費些時間進行空域掃瞄來搜獲目標; 而SPY-1由於精確度足夠且更新速率極高(在SM-2飛彈中途導引階段,神盾系統處理SPY-1雷達回傳的資料,對目標更新速率快於每0.1秒一次),能取得精確 且即時的目標位置,艦上照明雷達只需根據這些參數便能在一開始就進入飛彈導控程序,直接朝目標發射照明波束。SPY-1的雷達發射機由雷松(Raytheon)公司製造,可同時使用數個頻道 ,自動地搜尋、追蹤數個目標。 AN/SPY-l的雷達波束由計算機控制生成,而波形產生程式則是根據戰場環境與威脅情況所設計的。由於現代化反艦飛彈雷達截面積,且往往採用掠海飛行, 盡可能壓縮敵方雷達可用的反應時間並隱藏在海面雜波之內,所以AN/SPY-l在海面附近的低空區域採用多波束高更新速率優先進行密集搜索,對其他中/高空域則 採用適當的波束與更新速率進行搜索(因為雷達偵測高空目標時不受地球表面弧度或障礙物影響,反應時間長;而掠海反艦飛彈只有在從水平面出現時才可能被發現) 。根據戰術需求,SPY-1的電腦能控制雷達波束集中於預測威脅可能出現的特定扇區;而除了全部雷達靜止外,SPY-1也可以進行部分靜止,只讓雷達波束在某些扇區掃瞄。 SPY-1A雷達雷達顯示器的靈敏度可視需要而調整,可選擇讓小型或大型目標更加顯著,而且還可以在某些目標上標示一個圓圈,等到其 到達某一預定的距離時,再對該目標密切監控。不過,戰情中心(CIC)的雷達操作者在追蹤小型目標時要特別小心,要過濾海鳥的資料以免檔案被填滿。 神盾系統與SPY-1雷達在設計階段時,已考慮到蘇聯海軍各種電子反制措施的進步, 故在SPY-1雷達的電子反反制能力上下了極大的心力。根據測試證明,SPY-1的旁波瓣極小,敵方的干擾信號無法進入;就算敵方干擾系統能有效地對付SPY-1的雷達筆狀波束, 也只能干擾到某個方位,波束在其他方位仍能正常工作,因此在雷達顯示幕上只能看到一條單線干擾閃光帶,但是干擾波束周圍的一切東西都能清晰地看到。 當確定干擾源方位後,SPY-1雷達可用最大功率發射出一連串強力波束,使其燒穿干擾波而抵達目標,繼續正常運作。此外,SPY-1也具備量好的自適應性, 能根據回波自動分析背景雜波模式或敵方電子戰模式,並立即以變頻、動態目標顯示與調整波形等方式,自動與干擾環境對抗。 美國海軍也曾測試以神盾系統與SPY-1雷達偵測美國空軍的F-117匿蹤攻擊機,結果顯示即便是雷達截面積低如F-117的目標,面對SPY-1的匿蹤效能也不理想,足見SPY-1偵測能力之優越。 SPY-1的高功率特性雖然使其擁有一流的性能, 但也使其比較容易被敵方電子支援系統偵知而暴露己方位置,甚至遭受敵方反輻射飛彈的攻擊,因此在某些場合例如遭到攻擊時會採取 雷達靜默措施。SPY-1關閉後,系統能於零點幾秒內立刻停止工作,雷達波束在不到一秒的時間內即從空中完全消失;威脅消失而重新啟動雷達時 ,首批訊號將於一秒之後傳回;接著電腦根據原來的訊號檔案,迅速掃瞄85公里外的海平面,以重新尋找所有的水面目標, 然後再對整個半球體空間實施過濾,在18秒內過濾完所有的目標,據以修正原有的檔案,20秒之後恢復所有戰術畫面與正常功能。 與先前美國海軍多種大型艦載雷達後端類似,SPY-1的後端軟體也具備利用大氣條件進行超水平線偵測的模式,包含標準大氣狀況或低空大氣導管效應(Duct effect)等。在標準大氣狀況下,常用雷達波會有向下彎曲的傾向,有時能使艦載雷達獲得60到120km以外的水面接觸信號。而大氣導管效應則是有特定條件: 在某些氣象條件下,離地表最近的對流層溫度會隨著高度而遞增(正常狀況為遞減), 形成逆溫層(Temperature Inversion Layer),而此區域的電磁波會沿著逆溫層的上下邊 界傳遞到數百公里以外,類似在導波管內傳遞的情況,而此種現象便稱為導管效應,而可引 導電磁波傳遞的逆溫層區便稱為導管或導層。大氣導管現象通常只發生在海上,而且具有季節性, 不過在波斯灣、阿拉伯海、波羅的海、東地中海、印度洋與南中國海卻經常出現此一現象。 SPY-1的後端利用前述大氣狀態的演算方式,便可偵測到水平線以下的水面目標。神盾艦上可架設SEWASP蒐集大氣參數,使得SPY-1雷達透過後端來計算處理經從水平線以外獲得的回波;依照神盾系統項目辦公室的估測,利用SEAWASP測量的 大氣數據,能讓SPY-1雷達探測範圍超越地平線以外約25海里(46km),對飛行速度600節的反艦飛彈可增加2.5分鐘的預警時間。 根據美國海軍在航母戰鬥群的測試應用結果顯示,1990年代以降經過改進的AN/SPY-1能同時承擔廣區域搜索監視、目標精確追蹤、空中交通管制、空中攔截指揮、反潛作戰指揮、 氣象監視、點防禦低空/海面搜索、攻擊控制等多種任務,可完全代替過去美國海軍的AN/SPS-43A/49二維長程低頻對空預警雷達、AN/SPS-48長程三維對空監視雷達、 AN/SPS-58脈衝都卜勒近程搜索與目標追蹤雷達、AN/SPS-55平面搜索導航雷達。 在可靠性與可維修性方面,SPY-1系列在設計時採用了許多有效的措施,包括: 1.把全系統分成多個獨立運作的信號通道,如果其中某些通道損毀或失效,其餘通道仍能有效運作,使得系統仍能繼續有效地工作(雖然整體效能有所降級)。 2.採用模組化設計:全系統依照功能予以模組化,使得系統某一功能可在兩條線路上保持獨立;如此,即便某一線路損壞,也不致使整個系統失效。 3.組件實現標準化:全套系統的100多萬個電子組件,區分於2500個種類之中,其中98%為美軍標準組件,利於服役生涯的後勤保障。 4.後端配備一個「工作準備情況測試裝置」,能自動檢測系統任何故障部位,並調整電路、隔離故障元件。由於擁有此一裝置,SPY-1能在一般工作情況下直接進行系統測試檢查,無須關機。
AN/SPY-1的工作頻帶、頻寬、增益等 AN/SPY-1雷達的寬頻操作模式來自1972年開發的TRADEX S波段寬頻(Wide Band,WB)雷達的成果;TRADEX雷達使用稱為跳頻脈衝(frequency jumped pulses)的技術,產生一組中心頻率約3微秒(us)、透過不斷移動脈衝而獲得250MHz的頻寬,並以干涉積分(Coherent integration)的方式獲得足夠的距離精確度(約1m),而AN/SPY-1A的跳頻脈衝則是包含10個頻寬40MHz、中心頻率不斷移動的脈衝。 依照早期資料的敘述,AN/SPY-1的持續相干頻寬(sustained coherent bandwidth)為10MHz,瞬時頻寬(instantaneous bandwidth)達40MHz;此外,早期有幾篇論文指出AN/SYP-1有FL、FC、FH等三個子頻帶,每個頻帶寬度為40MHz(依照天線增益的情況來計算)。早期神盾系統SPY-1A相位陣列雷達的操作頻寬是垂直方向160MHz,或者60度掃描方位角120MHz。 日後神盾雷達系統的操作頻寬逐漸增加,最多能延展到400MHz;相較之下,1977年開始部署在阿拉斯加的AN/FPS-108 Cobra Dane大型陸基被動相位陣列雷達(主要用於偵測彈道飛彈)雷達的頻寬約200MHz,在45度方位角內獲得1.1m的距離精確度,方位角45度以外距離精確度約30m,而神盾系統與AN/SPY-1A的表現並不會比較差。依照1999年一篇林肯實驗室(Lincoln Laboratory)論文的內容,有個標題是「AN/SPY-1雷達的寬頻波形概念」(Wideband Waveform Concept for AN/SPY-1 Radar),使用400MHz的寬頻帶波形,基於原本AN/SPY-1雷達的操作頻段(3100~3500 MHz,操作頻帶寬400MHz)。在2002年,一篇論文標住AN/SPY-1雷達的操作頻寬為300MHz,這樣的頻寬大概能提供0.5~1m的距離解析度(range resolution)。 AN/SPY-lA的最短脈衝為5微秒(5us),脈衝壓縮大於128,系統增益(db)大於39.5分貝(db),聲噪係數(noisefigure)低於4.25分貝。早期神盾系統SPY-1相位陣列雷達的操作頻寬是垂直方向160MHz,或者60度掃描方位角120MHz;而到反彈道飛彈能力升級BMD 4.0.1版(2012年開始服役),SPY-1雷達的運作頻寬增加到300~400MHz。 依照外界報導,AN/SPY-1A雷達的增益為42分貝(dB,約15800),波束寬度為1.7度x1.7度;這是依照雷達增益的攻勢G = ρ(4πA/λ2)來計算,參數包括A(陣面孔徑)為12平方公尺,波長(λ)為 9.1 cm、 ρ為0.87(不過此參數似乎顯得太高);但實際上,如果波束角為1.7 x 1.7度,反推雷達增益大概只有9000。依照一份1978年論文,SPY-1A雷達接收端的噪訊(noise figure)大約是 4.25 dB(約2.66)。 依照公開資料,AN/SPY-1B雷達可產生的長度為6.4、12.7、25、51微秒(microseconds)的脈衝長度,脈衝壓縮率(pulse compression ratio)為128。依照1997年一份研究資料,神盾雷達脈衝產生的電磁干涉(electromagnetic interference)可達52微秒;不過隨著神盾系統日益升級以及納入BMD反彈道飛彈升級,SPY-1雷達的脈衝長度可能已經顯著改變。 在AN/SPY-1雷達發展反彈道飛彈模式時,引進了新的高能量波形(應該使用是不同的脈衝壓縮編碼),結合更強的都卜勒訊號處理技術,進一步提高對距離與速度的解析度,使處理器能從一群緊密相鄰、速度相近的目標中識別出飛彈的戰鬥部。 AN/SPY-1雷達各型號
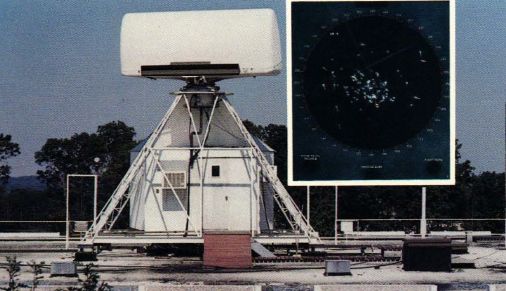
設置在RCA公司位於摩爾斯頓陸基雷達測試站(LBTS)的神盾系統一號工程發展原型(EMD-1) ,此結構包含一面相位陣列雷達與一部照射雷達,在1973年內進行了各項測試。
關於SPY-1雷達系統的原型測試過程,請見神盾艦載戰鬥系統一文。在1978年,美國海軍與RCA簽署SPY-1雷達的量產 合約。在1980年初,AN/SPY-1在EC-135、EA-6B與ERA-3B等電戰機的配合下,通過了為期五天的電子戰測試,測試完成後AN/SPY-1隨即定型為AN/SPY-1A。
以下分別介紹SPY-1系列的主要成員: SPY-1A是SPY-1系列的第一種量產型, 裝備於美國海軍第一種神盾艦艇──提康德羅加級飛彈巡洋艦的前12艘(CG-47~58)上。最早的SPY-1A由四面相位陣列天線、 波束控制處理器、信號處理器、射頻發射機、射頻接收機以及雷達控制/輔助設備組成。SPY-1A平均每個陣面的上甲板構造重量約13030磅(5..91公噸),下甲板重量為131584磅(59.685公噸)。 1.天線: SPY-1A有四面相位陣列天線,分為兩組,朝向前方與右方的裝在 首艛結構上,而朝向後方與左方的則位於機庫結構上方,涵蓋360度的方位,功能包括波束的成形、發射、接收與控制。每 個天線陣面結構的高度為4.06m,高度為3.94m;天線本身高度為3.84m,寬為3.67m。 每個SPY-1A的天線陣面包含68個子陣列,其中32個兼具發射與接收功能,另外36個是純用於接收的子陣列,每個子陣列有64個輻射單元或相移器(phase shifter),總計4352個收/發與接收單元。子陣列是天線工作時的基本單元,計算機根據波束生成的需求,分派若干個子陣列負責形成波束,進行某項工作。每個SPY-1A天線陣面總共擁有4480個輻射單元與相移器,其中包括4096個 結合發射與接收的單元、256個純翠接收的單元用來處理旁波瓣,此外還有128個用於電子反反制的輔助單元(純接收)。 在1973年啟用的神盾系統工程發展原型一號(EMD-1)的AN/SPY-1相位陣列雷達使用第一代鐵氧體相移器(Generation I Ferrite Phase Shifters),平均每個價格2000美元(1974財年幣值),整個雷達天線系統價格860萬美元。而1978年啟用的神盾系統工程發展原型三號(EMD-3)的SPY-1相位陣列雷達以及裝備於前12艘提康德羅加級(CG-47~58)的AN/SPY-1A,則使用第二代鐵氧體相移器,長度比EMD-1的第一代相移器減少50%,每個相移器價格也大幅減到200美元(1984財年幣值)。在工程發展(EMD)階段,每面SPY-1A的陣列天線重16900磅(7.666公噸),到了實際生產裝艦階段則降為12000磅(5.443公噸)。 SPY-1A的陣列天線能同時用於追蹤目標以及飛行中的SM-2飛彈,並包辦SM-2飛彈的上鏈/下鏈傳輸, 所以不需要額外的發射機/天線來執行上鏈動作。 2.波束控制器: 總共有兩具,分別管理前、後兩個射頻發射機與所對應的陣列天線,工作時利用來自信號處理器的相位移動控制訊號,為相連的天線陣面產生所需的發射和接收移相指令。3.接收機: 同樣分為前、後兩具,分別對應前、後的陣列天線組,可處理經由陣列天線、射頻前置放大器傳來的雷達回波,並將射頻能量轉換成中頻能量。4.信號處理器組: 功能包括為發射機產生射頻波形,以及處理來自接收機的雷達回波信號,最後將處理完成的AN/SPY-1A的圖像傳送給戰情室(CIC)的神盾顯示系統(Aegis Display System,ADS) 。整個信號處理機組合包括:一個中頻開關機櫃、一個中頻信息處理機櫃、一個類比/數位(A/D)轉換機櫃、兩個動目標顯示處理機櫃、一個脈衝壓縮信號處理機櫃、一個 輸入/輸出緩衝同步機櫃、一個波形產生器(WFG)機櫃、兩個輔助波形產生器(AWFG)機櫃(每個發射機配置一組)。5.發射機組合: 分為前後兩組,每組發射機分別向兩個相應的陣列天線饋送射頻能量,兩部發射機共用8個集中式的高壓電源。每組發射機包括 一個射頻特性監視器(RFM)、三個驅動/預驅動機櫃,以及兩組並連的末級正交場功率放大器(Crossed Field Amplifiers,CFA)機櫃。每個末級放大器由16個正交場放大器(CFA) 平行並連而成,由導波管將射頻能量送至天線陣面;每個CFA的峰值功率約132kW,每8個CFA負責供應一面陣列天線所需的射頻能量,兩組末級放大器總共有32個CFA,因此輸出的總功率應為4.2MW;公開資料指出SPY-1A的整體峰值功率約為5MW,平均功率32KW,不過這應該是CFA放大器組的輸出功率理論值,而不是實際上雷達陣面輻射的實際功率(射頻能量從發射機經過導波管傳輸到天線陣面,途中難免會有損耗)。 原本SPY-1A/B/D使用的發射機開關是真空管組件,每個天線共有八個,全系統32個,到2010年代以後會被固態晶體管組件取代。6.雷達控制/輔助設備:以一具AN/UYK-7數位電腦與相關處理程式為主體,以一個位於戰情室的UYA-4單色顯控台作為人機介面,並配置一個數位磁帶單元當作儲存裝置。 控制電腦的功能包括:決定雷達的工作順序、處理搜索和追蹤資訊、隨時回報目標追蹤的最新狀況、為在空的標準SM-2飛彈進行上/下鏈傳輸(up link/down link)、處理AN/SPY-1A雷達和戰備狀態檢測系統的數據 、支援雷達控制顯示工作等等,此外也作為AN/SPY-1A雷達系統與神盾的武器控制系統(WDS)或其他部分的介面。 受限於1980年代的計算機科技,早期SPY-1A面臨許多功能限制:首先,雖然SPY-1A雷達單一陣面能同時對200個以上的目標進行高精確度的單脈衝(monopulse)追蹤(四面天線總共可同時追蹤800個目標) ,但當時後端系統能力有限,因此單一陣追蹤數量被限制在128個 ;第二,雖然SPY-1A雷達本身功率強大,偵測距離超過300公里,但考慮後端系統的能量,因此只在85公里以內的半球實施密集搜索,平時對於300km以外的目標只偶而分配一些波束,無法滿足持續性的長程對空監視要求。 因此,當時美國海軍在神盾巡洋艦(提康德羅加級)上又追加另一具傳統的AN/SPS-49二維長程對空搜索雷達,對450km的遠程空域實施持續性的搜索;一旦發現可疑目標,再以SPY-1A對該區域實施密集追蹤。裝備SPS-49雷達還有 另一個用意,就是作為預防SPY-1故障的一個備份;此外,SPS-49位於桅杆頂部,架設位置高於SPY-1A雷達,對低空目標探測距離較長。不過1990年代以後,隨著電子與計算機科技突飛猛進,神盾後端處理能量迅速成長 ,能對200海里(370km)以內的空域進行密集監視,可靠度也越來越值得信任,提康德羅加級艦上那具SPS-49雷達便益顯多餘;此時這具雷達唯一的價值,大概就是最大偵測距離仍比SPY-1長約100公里而已。 美國海軍從2008年開始為提康德羅加級執行的巡洋艦轉換計畫(Cuiser Conversion Program,CCP)中,便開始將這具已經形同雞肋的SPS-49雷達拆除。 1990年代初期SPY-1A進行改良,將UYK-7電腦換成UYK-43,而UYK-43再經過商用科技(COTS)改良 ,同時追蹤目標數提升至3000以上,電子反反制能力也有顯著提升。
(上與下)一艘提康德羅加級飛彈巡洋艦正在進行AN/SPY-1相位陣列雷達天線安裝作業。
美國海軍在2003年將一套SPY-1A相位陣列雷達(單天線)捐贈給美國國家強烈颶風實驗室(The National Severe Storms Laboratory,NSSL),安裝在該機構位於奧克拉荷馬州諾曼(Norman, Oklahoma)的測試場地,用來探測與研究大氣。為了減少氣候影響,這套SPY-1A雷達陣面安裝在球型外罩內。這部雷達一直使用到2016年5月31日除役,之後被更新型的先進技術展示(Advanced Technology Demonstrator,ATD)固態雷達取代。
美國海軍曾將一套SPY-1A相位陣列雷達捐贈給國家強烈颶風實驗室(NSSL), 從2003年使用至2016年。這部SPY-1A外部加裝雷達罩。 SPY-1B/(V) 在1980年1月,美國就展開SPY-1A的改良工作。在1984年3月8日,美國海軍與RCA簽署生產改良型SPY-1A的合約,同年5月29日簽署生產雷達行波管的合約,這就是性能精進且重量減輕的SPY-1B, 並安裝於普林斯頓號(USS Princeton CG-59)起的提康德羅加級 飛彈巡洋艦上。第一套SPY-1B原型在1984年11月首度進行偵測測試,而普林斯頓號上的神盾系統與SPY-1B雷達在1989年達成初始作戰能力(IOC)。 SPY-1B的整體架構、功率、天線尺寸皆與SPY-1A相當,但使用了更新的科技以增加系統性能、減低系統的重量與複雜度。 由於電子技術的進步,SPY-1B引進超大型積體電路(VLSI)技術,使得系統的電子機櫃總數由SPY-1A的11個降至5個, 重量減輕30%(SPY-1A每個陣面重12000磅或5.44公噸,SPY-1B每個陣面則降至7900磅或3.58公噸),系統中分離的數位模組數量由3806個大幅降至1606個。 SPY-1B針對雷達天線、發射機、信號處理、控制等做出不少改良,主要分為以下項目: 1.天線:SPY-1B引進了新的相位陣列天線,雖然外觀與SPY-1A類似,但實際上有顯著的改進,例如功率峰值提高、平均旁波瓣降低。原本SPY-1A陣面由10行波導功率合成,SPY-1B改由七行帶狀線合成,使陣面布局更近似圓形孔徑 ,長度與寬度大約都是3.65m(12英尺)。原本SPY-1A天線由68個子陣列構成,每個子陣列包含64個輻射單元,總共4352個單元;而SPY-1B則是每兩個輻射單元就構成一個子陣列,整個天線共有4350個輻射單元,構成2175個雙單元子陣列,外加兩個旁波瓣對消子陣列(每個對消陣列同樣由二個組件 構成);由於子陣列數量大增,AN/SPY-1後端控制電腦分配子陣列的彈性就大幅提高。原本SPY-1A使用無相位調整能力的近場測試設備(ANFASTI),SPY-1B則以具備相位調整能力的ANFASTII取代,可更精確控制天線孔徑上的相位和振幅分布。 原本SPY-1A使用四位元有補償相移器,在SPY-1B上被更輕、更緊致的新型七位無補償相移器取代,不僅進一步減少相位變化量,而且單面天線重量只有SPY-1A的65%。 其他措施包括提高製作陣面的加工精度、採用高錐度照射等等。由於SPY-1B波束指向偏離軸心大角度時的能量與脈衝長度都比SPY-1A更好,因此對抗大角度俯衝目標的能力也有所提升。與SPY-1A相較,SPY-1B天線的旁波瓣強度減少15dB。 2.信號處理器:SPY-B信號處理機組引進超大型積體電路(VLSI)技術,從而使系統體積重量大幅減低,性能與可靠度則向上提升。 SPY-1B的信號處理器由11個16位元微處理器構成,運算處理能力強化不少。SPY-1B的信號處理損耗比AN/SPY-1A減少3dB,採用單脈衝搜索,改進對低雷達截面積 目標的探測能力;此外,信號處理器組內建了自我檢測與自動故障隔離功能,可減輕戰術計算機的額外負擔。 3.改進發射機組:主要是提高射頻脈衝的佔空比。SPY-1B換用新的調制開關管 (EIMACY633A)和正交場放大器(L4707或SFD-262) 作為發射機的末級功率放大和驅動/預驅動器,並以新設計的固態開關管驅動器來取代SPY-1A的電子管型驅動器。。 4.原本SPY-1A的每個天線陣面區分為32個實體的發射子陣列,以子陣列作為波束分派的單位,而從SPY-1B則改用計算機控制分派,使波束的管理與分配更具彈性。 SPY-1B增加了具備自動柵鎖定(Auto-Grid Locks)裝置的SGS系統,以Link-11資料鍊將數艘艦艇的雷達整合在一起運作並共享資料 。此外,SPY-1也增加了越天頂追蹤模式,使雷達波束能指向垂直方位,能有效偵測以終端拉高再俯衝模式攻擊的飛彈(如蘇聯AS-4與AS-6) 。早期的SPY-1B使用UYK-7主電腦與UYA-4顯示系統,後期型則換成UYK-43電腦與UYQ-21顯示/控制台。 由於天線元件、後端信號處理組件與計算機的改良更新,SPY-1B在降低天線旁波瓣、雷達運作佔空比(duty factor)、減少信號處理器損耗、提高對抗背景雜波與電子干擾等關鍵性能都更上一層樓。依照一般公開資料敘述,SPY-1B的峰值功率與SPY-1A相當,但是平均功率提高一倍,這意味著SPY-1B的CFA發射機的佔空比(duty cycle)是SPY-1A的兩倍。一般資料指出SPY-1B平均功率為58KW,峰值功率為4~6MW。 而改良後的控制電腦程式也改進了雷達波束在各種環境運作下的自適應性與抗干擾能力。目前SPY-1B已被升級為SPY-1B(V),提高了動態目標指示能力(moving target indication )。 SPY-1D
伯克級的SPY-1D雷達系統將四面天線集中於前部船艛上,共用一套後端發射機。< 在1985財年,美海軍簽署了輕量化的AN/SPY-1D雷達系統與配套神盾Baseline 4系統的發展合約,準備用於規劃中的伯克級神盾驅逐艦上,於1987年進行鑑定測試,第一套AN/SPY-1D於1989年1月交付美軍。在1990年度, GE繼續改進AN/SPY-1D的電子反反制能力。AN/SPY-1D雷達 的天限陣面、技術與後期型的SPY-1B相當(每個陣面有4350個輻射單元),但結構大幅簡化,並引進更新的電子科技,使得成本、系統複雜度與重量都有所降低 ,四面天線加起來的峰值功率與平均功率理論上和AN/SPY-1B相似。依照2004年國防科學委員會報告(Defense Science Board Report)發表的「contribution of space based radar to missile defense」記載,神盾雷達平均雷達發射功率口徑是485KW/平方公尺 ;如果這是指SPY-1B/D雷達(當時SPY-1D(V)尚未問世),考慮到天線面積約12平方公尺,其平均功率約為40KW,介於SPY-1A(32KW)與SPY-1B(58KW)之間。 在2002財年,SPY-1D每個相移器的成本為100美元,到2006財年時進一步降為80美元。 SPY-1D的後端發射機的組件大致與SPY-1B相同,但是SPY-1B擁有兩組發射機、每組負責供應兩個天線陣面;而SPY-1D則只有單一發射機供應四個陣面。雖然如此,由於發射機是透過高速波導開關以分時(time sharing)方式輪流供應每部天線,因此SPY-1D雖然只有一部發射機,但天線發射功率維持與SPY-1B相同。 柏克級的四具SPY-1D相位陣列雷達天線集中在同一個船樓結構上,此種天線構型稱為Mod 5,整套系統僅使一組集中式雷達發射機,不過採用更新的技術, 包括以新的水冷式60Hz高壓電源取代SPY-1A/B的400Hz高壓電源,使得整體總輸出功率仍與SPY-1A/B相當,但是系統功率重量比 改善40%,且成本降低40%;而原本分散於二個艙室的後端電子裝備,也被簡化到一間艙室裡。為了配合中式的發射機 ,SPY-1D的波束控制程式也經過收改。後端處理控制方面,SPY-1D以UYK-43電腦取代SPY-1A的UYK-7, 以UYQ-21彩色圖形顯示/控制台取代SPY-1A的UYA-4,處理能力大幅提升。從神盾Baseline5.2版起,SPY-1D又增加一具追蹤起始處理器(Trace Initial Processor,TIP),以UYK-44中型電腦為核心,能根據所搜獲的目標,決定是否需要進行追蹤,並消除背景雜波,提高低空目標偵測能力。柏克級從 DDG-68起以COTS技術改良SPY-1D,用Motorola 68040處理器取代SGS中的UYK-44。由於SPY-1D的可靠度與後端處理能力比SPY-1A更加精進,加上為了節省成本與排水量,柏克級就省略了提康德羅加級裝備的SPS-49對空搜索雷達。 柏克級的神盾系統經過簡化,省略原本的MK-86艦砲射控系統,改由神盾系統中的MK-34艦砲武器系統 (Gun Weapon System,GWS)控制,而SPY-1D也直接負責為MK-45提供目標追蹤資料,而不再需要裝備一座X波段照明雷達。 從伯克級的Flight 2A(DDG-79起)開始,由於在艦尾設置直昇機庫,朝向後方的兩面陣列天線遂升高2.4m,因此雷達發射機與陣列天線遂分開放置於 上下兩層甲板,發射機位於天線之下(原先天線與發射機都設在同一層甲板),這個天線構型稱為Mod 7;而發射機與雷達之間仰賴的曲折導波管工程, 是主要的技術挑戰,因為長而曲折的導波管容易使能量損耗增加,尤其是導波管彎曲的部位洩漏射頻能量較多,損失能量且使雜訊過大;而如果上層結構因波浪衝擊等外力因素而搖晃震動, 使內部的導波管發生些微形變,將使雷達的射頻能量不穩定,導波管故障受損的機率亦相對增加。除了伯克Flight 2A之外,西班牙的F-100神盾巡防艦將雷達天線也採用發射機與天線分離的方式,天線位於艦島後方的塔狀物上層,發射機位於下層, 使得艦體重心不至於過份升高,而此種為F-100修改的SPY-1D版本被稱為SPY-1D(F)(F代表巡防艦,Frigate),又稱Block 709。 由於F100的艦體平台僅六千噸級,因此SPY-1D(F)的體積重量比原版SPY-1D略減,陣列天線的收發單元也稍微減少,性能略為降低。 SPY-1D(V) 由於冷戰結束以後美國海軍經常得去接發生衝突的地區執行任務, 艦隊越來越靠近敵國海岸,因此洛克西德.馬丁公司從1998財年開始發展SPY-1D的改良型──SPY-1D(V),提升在陸地沿岸的操作能力, 包括應付陸地上複雜地形造成的回波干擾、低空陸上目標的偵測、強烈電子反制環境下的操作等能力都有所提升;此外,過濾海面雜波、 偵測掠海反艦飛彈的能力也有增加。SPY-1D(V)的提升重點包括雷達發射機性能、信號處理能力以及控制電腦等,引進COTS技術來改進運算能力,以一部HP PA-RISC處理器取代原本由UYK-43電腦負責的戰術運算工作(如追蹤起始處理器等),而HP PA-RISC的運算能力是UYK-43的數倍;而原先的UYK-43則改為負責非戰術性的運算並連接現有系統, 並以開放系統模組套件(Open System Module,OSM)加以改良,提高其擴充能力。除戰術運算外,HP PA-RISC也用於吸收雷達性能提升後額外增加的信號處理工作量 。 發射機方面,SPY-1D(V)的發射機使用新一代正交放大器(CFA),输入功率增加45%,聲噪係數(noisefigure)降低2分貝,占空比增加33%(從SPY-1D的10%增為約13.3%);因此,如果早期SPY-1D的加總平均功率以58KW計算,SPY-1D(V)由於CFA輸入功率與佔空比增加,四個陣列天線平均發射功率增為111KW(如果不考慮輸入功率增加而只考慮佔空比增加,則SPY-1D(V)平均功率為77KW) ;此外,SPY-1D(V)接收端也換裝砷化鎵(GaAs)半導體技術的固態低聲噪放大器(LNA)。SPY-1D(V)在 在2003年4月3日首度進行艦上測試,2004年 左右隨著柏克Flight 2A的平可尼號(USS Pinckney DDG-91)首度進入美國海軍服役, 使用神盾Baseline7系統的伯克級Flight2A飛彈驅逐艦(DDG-91開始)都裝備SPY-1D(V)雷達。 此外,隨著美國海軍為神盾系統增添反彈道飛彈能力,透過後端軟體的改進,SPY-1B/D雷達在追蹤彈道飛彈時的操作距離超過了2000km。依照一些模擬資料(如Yakov D.Sherman的"Radar cross section estimates from Computer simulation of Aerial Target Radar Scattering, Recognition, Detection and Tracking"一書),推測AN/SPY-1D(V)對雷達截面積(RCS)僅0.0025平方公尺的目標擁有超過80km的偵測距離 。依照另一份公開資料記載,當時即將部署的SPY-1D(V)雷達能在165公里(90海里左右)外探測到如高爾夫球般大小的目標(大約直徑1.68吋),換算之後對於3.3GHz頻段的信號,雷達截面積相當於0.0025平方公尺;依照這份資料的換算,SPY-1D(V)對於大小類似彈道飛彈戰鬥部的目標(對於3.3GHz頻帶的雷達截面積約為0.03平方公尺),探測距離達310公里。 在2016年上旬,消息傳出美國海軍打算對較早期的柏克Flight 1/2的SPY-1D相位陣列雷達進行升級,重點在升級天線提高探測靈敏度,增進艦隊防空與彈道飛彈偵測能力;改良型天線的初步設計工作在2016年初已經完成,預計在2022年起陸續為柏克Flight 1/2進行升級。在2018年4月12日,美國海軍海上系統司令部(Naval Sea Systems Command,NAVSEA)與洛馬集團簽署價值6850萬美元的合約,生產並交付5個升級的SPY-1D(V)雷達,這是SPY-1D(V)改用低噪聲放大器(LNA)組件天線的第一個生產訂單,雷達的信噪比(靈敏度)比原本SPY-1D(V)提高四倍,改善了反彈道飛彈作業時性能。這五個天線中,其中四個安裝於一艘接受BMD升級的柏克級飛彈驅逐艦上(此時尚未排定),另一個則交付瓦樂普斯島(Wallops)的美國海軍設施,進行持續的測試驗證工作。 除了美國的柏克級之外,日本的金剛級飛彈驅逐艦(相當於日本版的柏克級)以及西班牙新一代的F-100飛彈巡防艦也使用SPY-1D雷達系統,而南韓也在2002年7月底決定其新一代KDX-3七千噸級飛彈驅逐艦採用神盾系Baseline7.1版本與SPY-1D雷達系統。
SPY-1系列的外銷用縮小版(FARS、ADAR-2N、SPY-1F/K)
左側是挪威海軍南森級巡防艦(Nansen class)HNoMS Roald Amundsen (F311),裝備巡防艦用的 AN/SPY-1F相位陣列雷達;一旁停靠的是一艘西班牙海軍F100艾爾瓦洛.迪.巴贊級
(Álvaro de Bazán class)飛彈巡防艦,裝備AN/SPY-1D相位陣列雷達。 針對國際市場上四、五千噸級的中小型作戰艦艇,SPY-1系列也發展出數種專供外銷的縮小版。 SPY-1系列最早出現的外銷型是1980年代推出的巡防艦相位陣列雷達(Frigate Phase Array Radar,FPAR),用來競標當時北約各國合作研發中的北約90年代共同巡防艦 (NFR-90)的北約防空做戰系統(NAAWS)防空系統。FPAR是當時以GE公司領導的NAAWS競標方案的核心,基本上是神盾系統的縮小版。FPAR每面天線陣列的長、寬約為2.43m, 每面天線由1056個相移器組成,偵測距離約為SPY-1A的六成,可導引標準SM-2與海麻雀ESSM防空飛彈。除了NFR-90之外,同時期台灣也在醞釀以光華一號飛彈巡防艦為基礎發展的先進防空艦(稱為先進戰系案,ACS) ,因此GE航太也推出FPAR的姊妹版──ADAR-2N(相位陣列雷達二型海軍型)參與競標,其數據、性能與FARS相仿;但是NFR-90計畫在1990年1月瓦解,台灣的ACS也在1995年宣告取消。 ADAR-2N每面天線只有1056個相移器的天線,約是SPY-1A的1/4,理論上ADAR-2N因為天線孔徑小, 波束角度較寬(能量不集中),且陣列面積降低導致接收信號的強度也下降,解析度與低角度目標追蹤能力理當遜於SPY-1A;但是ADAR-2N卻首創引進COTS商規組件來進行信號處理 (據說是RISC R3000,其運算能力優於早期SPY-1A的軍規電腦組件),在測試時低角度目標追蹤性能優於同時期的SPY-1A,SPY-1A直到後來也進行升級後才要回領先。 雖然FPAR與ADAR-2N都沒有外銷實績,然而隨後洛馬繼續以FPAR/ADAR-2N為基礎,結合AN/SPY-1D的系統經驗,發展出SPY-1F相位陣列雷達,搭配神盾系統的衍生版本來角逐新一代中型防空艦艇的市場。SPY-1F天線陣列的尺寸為8 x 8英尺(2.43 x 2.43m),每個陣面由1856個相移器構成, 比FPAR/ADAR-2N略大,可稍微增加偵測距離與目標分辨能力。 由於陣面與功率小得多,AN/SPY-1F的探測距離大約只有AN/SPY-1D(陣面12 x 12英尺,每個陣面有4350個輻射單元)的54%,約180公里級。與西班牙F-100的SPY-1D相同,SPY-1F同樣採用發射機置於下層、天線位於上層的分離設計,其相對較小的天線系統可安裝於塔狀桅杆的上部,利於中小型艦艇的安裝佈局。 西班牙為挪威皇家海軍設計建造的南森級(Fridjof Nansen class)巡防艦是第一種採用SPY-1F雷達系統的艦艇,搭配縮小版神盾系統 。依照Norman Polmar的世界海軍武器系統第五版(World Naval Weapon Systems, 5th Edition)記載,SPY-1F的探測距離是SPY-1D的54%(約180公里級);不過依照洛馬集團的說法,SPY-1F對高空典型目標(高度3000m以上、雷達節面積3平方公尺)雷的最大探測距離可達320公里。 在德國方面,德國曾委託洛馬集團針對在德國F-124巡防艦上安裝SPY-1F相位陣列雷達與小神盾系統進行相關初步設計,作為F-124的APAR/SMART-L等雷達/戰係組合萬一發展不順時的備案;雖然最後F-124獲得成功,不過也由於這個淵源,使德國順利將SPY-1F與迷你神盾系統導入其外銷艦艇設計,例如德國新型MEKO A-200外銷用巡防艦也將SPY-1F列為選擇性配備。此外,洛馬集團也比照SPY-1D(V)的改良模式,推出SPY-1F的衍生改良型──SPY-1F(V),強化了近岸操作能力以及掠海反艦飛彈的偵測能力 ;但礙於天線孔徑的限制,SPY-1F很難具備合格的彈道飛彈偵測能力 。 此外,SPY-1系列還有一種新推出的衍生型──比SPY-1F更輕更小的SPY-1K,天線尺寸僅5 x 5英尺(1.67 x 1.67m)每面天線擁有912個天線單元,適合裝置於不到3000噸的中小型艦艇上。截至目前為止,SPY-1K還沒有接獲訂單。以洛馬集團為首先進巡防艦銷售聯盟(AFCON)為競標2004年初以色列新一代巡防艦計畫,便推出一種兩千噸級「迷你神盾巡防艦」設計,其主要偵測裝備就是SPY-1K(V)相位陣列雷達,不過並沒有獲得以色列青睞。
|