E-2A/B/C/D鷹眼空中預警管制機
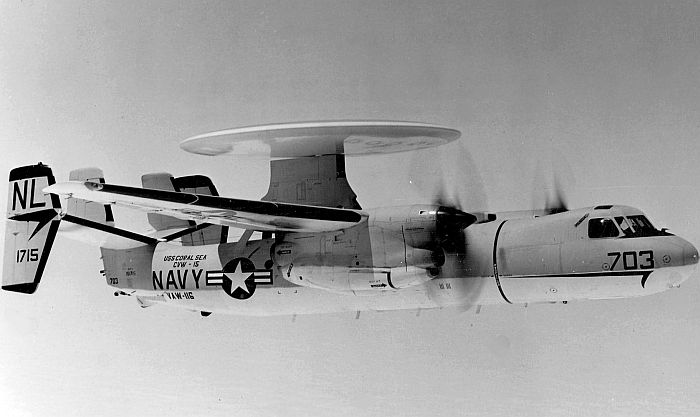
一架隸屬美國海軍的E-2A空中預警機,攝於1967年。E-2A是E-2最早的量產型。

最早的鷹眼W-2F-1原型機,之後編號改為E-2A。

一架E-2A空中預警機(左)與一架前一代的E-1B(右)艦載空中預警機。

E-2B是E-2系列第一種改良型號。

一架剛從航空母艦甲板起飛的E-2C。注意較新批次的E-2C Group 2都在機首漆上白色十字,
提醒彈射器操作人員增大彈射出力,因為機體重量大於較早批次的E-2C。

一架準備從喬治.華盛頓號(USS George Washington CVN-73)航空母艦起飛的E-2C預警機。

(上與下)俯瞰E-2C。


一架已經換裝八葉片螺旋槳的E-2C。注意雷達圓盤天線頂部的敵我識別天線還是較舊的半球狀。

E-2C Hawkeye2000首次試飛的照片,注意機腹加裝了一個圓盤狀的協同接戰能力(CEC)的陣列傳輸天線。

一架E-2C Hawkeye2000。注意機腹的圓盤狀的CEC陣列傳輸天線。

一架在航空母艦飛行甲板上的E-2C Hawke 2000,機翼尚未展開。
注意雷達圓盤天線頂部的敵我識別天線是較新的杯狀。

一架E-2C(下)以及一架利用E-2機體衍生而來的C-2航空母艦用運輸聯絡機。

兩架飛越富士山的E-2C,較近一架已經換裝八葉片螺旋槳,較遠的一架仍使用原有的四葉片螺旋槳。

一個E-2C的編隊。

2010年代開始服役的E-2D,換裝AN/APY-9相位陣列預警雷達。
此照片為E-2D在2013年1月底首度參與紅旗演習(Red Flag)的照片。

(上與下)飛行中的E-2D編隊。注意敵我識別天線已經整合到雷達圓盤中,不需要在頂部增設額外天線;
此外機鼻漆上三角形記號來提醒彈射器人員增加彈射力道。

──by Captain Picard
|
格魯曼(Grumman)公司製造 長17.59 翼展24.56m 空重18234kg,總重19535kg,最大起飛重量23391~26082kg 極速650km/hr 巡航速率474km/hr 作戰半徑322km 續航力2855.8km 滯空時間4~6小時 Allison T-56-A-8(E-2A/B)/425(E-2C)/427(E-2C Group 1 update/Group 2)渦輪螺旋槳發動機X2(T-56-A-425每具4600軸馬力,T-56-A-427每具5100軸馬力) 機組員5人(正、副駕駛各一,系統操作人員三名,分別為戰鬥資訊中心操作員、航空管制員、雷達操作員) 起源 為了向外延伸航空母艦的防空偵測能力,美國海軍在二次大戰末期就開始在一些較大型的艦載螺旋槳攻擊機上裝置雷達成為雷達睄戒機,例如由TBF魚雷機改裝而來的TBF-3W。往後有數種改裝自美國海軍體積稍大的現成艦載機種的雷達機(例如由AD-1天襲者(Skyraider)螺旋槳攻擊機改裝而來的AD-3W/4W/5W)進入美國海軍服役,與先前雷達睄戒機的最大不同在於機上多了一、兩名通訊管制員,可利用無線電直接指揮戰鬥機作戰,而這便是艦載空中預警管制機(AEW)的先驅。 1950年代,美國海軍設計建造六萬噸級的佛瑞斯塔級(Forrestal class)航空母艦陸續進入美國海軍服役,能操作更大型的艦載機,因此美國海軍從1953年2月起開始規劃重量更大、功能更強大廣泛的新一代艦載空中管制預警機。在1955年11月23日,美國海軍發布了代號OS-139的一份提案,希望設計一種能相當於空中戰情室(CIC)的艦載預警機,設計競標在1956年2月正式啟動,項目代號VW(X)。VW(X)項目的要求是將一套性能強大的大型搜索雷達與一系列自動化戰術信息分配系統裝上飛機,包括當時尚在建構的海軍戰術資料系統(NTDS),可透過資料鍊與飛機、艦艇分享雷達資料並指揮機群作戰,具備完整的空中指揮管制能力;因此,VW(X的技術難度遠非早期將搜索雷達簡單地裝上飛機(如TBM-3W)可比。 在啟動VW(X)之前,美國海軍航空局就展開佈局,先啟動一個技術指標較低的競標案,發展一種過渡性的預警機來填補VW(X)成熟之前的過渡期。針對這項過渡性競標案,格魯曼(Grumman)公司立刻推出由該公司現有的C-1航母運輸機(S-2追蹤者(Tracker)雙發動機反潛機的衍生型)結合偵測距離250到300海里的AN/APS-82大型雷達而成(這也是第一種將雷達架在機背上);這個提案迅速脫穎而出獲得美國海軍青睞,就成為全世界第一種專用的艦載預警機,正式型號稱為E-1。雖然雷達功率提高不少,但E-1B追蹤者比起早期雷達睄戒機還是高明不到哪裡去,最主要的功能仍只是向艦艇回報雷達獲得的資料,本身的直接指揮管制能力還是僅限於透過無線電以語音指揮機群作戰;且E-1B機體不夠大,沒什麼進一步發展的空間,故很難經由提升而滿足往後美國海軍更高的需求。E-1B總共生產88架,1958年開始服役,到1977年除役。
(上與下)由C-1運輸機加裝預警雷達衍生的E-1B追蹤者預警機, 是美國海軍第一種專用的艦載預警機。
至於VW(X)的競標者包括格魯曼、沃特錢斯.沃特(Chance Vought)、洛克希德(Lockheed)、道格拉斯(Douglas)等美國海軍艦載機廠商,最後由格魯曼獲勝,這就是鷹眼(Hawkeye)預警機;由於格魯曼已經先為美國海軍提供E-1追蹤者艦載預警機作為在VW(X)之前的過渡性機種,或許是格魯曼再下一城獲得VW(X)合約的主因。最初格魯曼發展的預警機代號為123型,後來獲得的型號為W-2F(原型機型號為W-2F-1),之後才改成E-2。由於E-2鷹眼服役初期有許多問題,因此美國海軍仍然仰仗E-1一段時間。 E-2的雷達採用一具八木式圓盤型旋轉天線,架設於機背上的旋轉座,成為E-2系列在外型上最大的特徵 ;此圓盤天線外罩直徑約7.3m,厚0.79m。在地面停放時,雷達天線的液壓機構可將天線降低0.64 m,以節省佔用的空間 。八木天線結構輕巧,在當時是最適合安裝在飛機上的天線,然而受限於航空母艦機庫空間,E-2的雷達罩尺寸只有直徑24英尺(約7.315m)、厚度2.5英尺(0.762m),這種天線孔徑相對於UHF波長(約10cm~1m)實在不足,只能產生很寬的波束,意味著雷達回波的精確度不高,只能在海面平靜的時候用回波時間差來推算目標高度,海況較高時就易受干擾,必須靠船艦的三維雷達來測量目標高度。除了主動雷達偵測之外,從E-2C開始裝備的被動偵測系統(Passive Detection System,PDS)也是一項重要作業裝備,在距離蘇聯Tu-95RT遠程偵察機雷達的有效偵測範圍的3至5倍就能截收信號並完成標定。E-2的機體採用兩具 艾力森(Allison,在1995年被Rolls Royce購併)的T-56系列渦輪螺旋槳發動機,垂直尾翼位於水平尾翼的兩邊,而兩水平尾翼中間各設有一個垂直安定面。到目前為止,全世界所有的AEW中僅E-2的機體是專門為E-2而開發的,其餘則都是利用市場上現成的大型機體發展而來。 此外,美國海軍也利用E-2的機體衍生出C-2艦載運輸機,作為往返於航艦與地面的運輸、聯絡機,於1964年首度試飛,1966年起進入服役,產量為58架。 與水面船艦的雷達相較,E-2不受地形與水平線造成的搜索範圍限制,而居高臨下的搜索方式使得任何空中的敵機或飛彈都無所遁形。E-2可在離航空母艦數百公里外進行偵測預警作業,並 以Link-4數位資料鏈與負責防空的F-14戰鬥機進行無語音的戰術情資交換;此外,E-2還可透過資料鏈將資料傳輸給整個戰鬥群的艦艇,因此其功能不侷限於指揮戰鬥機中隊作戰。在作戰時,攜帶AIM-54鳳凰飛彈的F-14戰鬥機的戰鬥空中巡邏(CAP)陣位在距離航空母艦戰鬥群內層防禦圈以外的500海里,接近或超過蘇聯Tu-95RT遠程偵察機的雷達偵測範圍,而E-2C部署在CAP前沿往後的50海里處指揮F-14。由E-2C與F-14組成的防空網,敵方以艦艇或飛機發射一定數量之內的飛彈攻擊航空母艦的企圖幾乎不可能達成。雖然使用渦輪螺旋槳發動機的E-2無論續航力、空中操作時間與空中管制能力等都不如美國空軍的E-3預警機,但其造價與操作成本均遠低於後者。 由於美國海軍非常重視電磁輻射管制(Emissions Control,EMCON),盡量降低航空母艦的通信、航管與雷達信號被蘇聯海洋監視系統(Soviet Ocean Surveillance System,SOSS)透過被動截收(包括陸基的通信監聽定位、海上的AGI情報船、長程偵察機乃至於US-P監視衛星)來標定航空母艦的位置。因此,戰時EMCON作業下 ,航空母艦的航空管制作業遂改由E-2C接手,避免航空母艦發射HF的TACON管制信號,不過屆時E-2C的航空管制作業與回收飛機管制任務就會十分沈重。 另外,在EMCON作業中,E-2C預警機 經常被作為航空母艦戰鬥群以及其他海軍單位的UHF/VHF通信中繼傳輸平台,這嚴重佔用了E-2C的有限系統資源(UHF通信的高指向性意味著極低的旁波瓣,使得敵方接收天線一定要在 主波瓣行進方向截面上才有可能接收,所以在EMCON作業中比較不會暴露位置,但UHF通信需要一個中繼傳輸平台;一般而言UHF通信使用衛星當中繼,但在全球部署狀況下,通信衛星不會隨時隨地通過航空母艦戰鬥群上方 ,在沒有衛星時就只好使用E-2作為UHF中繼傳輸,雖然E-2並不是一個夠理想的傳輸平台)。美國海軍的因應是改進操作層面,戰鬥群指揮官需要向下水明確表達戰術議題以及子戰鬥群指揮官的決定權限,盡量減少非必要的UHF溝通;美國海軍也發展簡潔指令系統,使用有限的UHF快速傳達指令,而由於空載的Link-14與艦載的Link-11數位資料鏈出現,使EMCON作業中每次有限的通信時刻都能同時向整個航母戰鬥群的單位發佈戰術指令,大幅增加作業效率。如此,不僅將有限的UHF通信效率最大化、避免無限制地佔用E-2C的頻寬,也強話了EMCON作業中的反應與操作能力。 E-2A/B/C E-2首架原型機於1960年出廠,同年10月21日首次試飛;第一架量產型號為E-2A,1961年4月19日首次試飛,第一架於1964年1月19日交付美國海軍,開始取代E-1成為美國海軍制式艦載空中預警管制機。E-2A採用單機功率3155軸馬力的T-56-A-8渦輪螺旋槳發動機以及一具由GE生產、偵測距離約200km的AN/APS-96雷達。AN/APS-96採用 類比式的移動目標指示(Moving Target Indicator,MTI),以單延遲線固定目標對消技術,將前後兩道雷達回波相減,位置固定的雜訊由於回波相同而被消除,只有移動目標因為都卜勒頻移使後續回波產生細微改變,相減後仍能保留出差值,如此就能分辨海上固定物體產生的雜波;此外,又使用林肯(Lincoln)實驗室開發的時間平均雜訊同步調空基雷達(Time-Averaged Culttered-Coherent Airbone Radar,TACCAR)技術,鎖定海面雜訊相位差,將回波的相位平移相減,消除預警機本身飛行速度對動態目標分辨造成的影響。以上技術能鎖定寬而弱的海面雜波,但無法應付窄而強的陸地回波,因此APS-96雷達缺乏內陸操作能力 ,只能在海上提供預警和引導友軍機群執行任務。 到1967年為止,總共有56架E-2A進入美國海軍服役。E-2系列的第一種改良型──E-2B於1969年2月20日首度試飛,主要改良包括換裝具備內陸操作能力的APS-111雷達,並以Mod-Ax計劃開發的新型L-304數位電腦取代原來的類比計算機、改善機上電子設備的可靠性、加大水平尾翼兩端的垂直尾翼面積等。至1971年為止,共有51架E-2A被升級為E-2B。 在將E-2A升級為E-2B的同時,美國也開發更新型的E-2C,改良幅度更大。 美國總共建造兩架E-2C原型機,於1971年1月20日首次試飛,同年中投入生產,量產型於1972年9月23日首次試飛,1973年起交付美國海軍,1974年2月起開始行程作戰能力。 相較於E-2B,E-2C的主要改良為換裝APS-120雷達、性能提升的T-56-A-425發動機 (單機功率5100馬力),並加裝一套利頓(Litton)的AN/ALR-59(後來升級為AN/ALR-73)被動偵測系統(PDS)。為了因應新增的航電系統,E-2C還增加了一套冷卻系統,此系統的進氣口裝在機背上。 相較於APS-111雷達,APS-120配備一具新的強化穩定性發射機、一具自動偵測器和擁有恆定誤警率(CFAR)電路的系統電腦,擁有較強的雜訊與旁波瓣抑制能力 ,並繼續沿用雙延遲線固定目標對消技術,具備有限的對陸地俯視能力,不過對抗陸地上空雜訊的能力還是不足。 AN/ALR-59被動偵測系統包含四組接收天線,分別位於機首、機尾與水平尾翼兩端,可接收來自空中、海上、地面電磁訊號,由中央處理器控制進行同步掃瞄;接收到電磁信號時,處理器比對不同接收天線的信號強度與時間差,自動計算出信號來源的精確方位,同時也能自動分析信號的相關參數並進行判別。 而ALR-73是一種能同時以多頻段同步進行掃描作業的可變電子偵察系統,結合多部雙波束天線、數位式閉環快速調諧本機振蕩器、專用邏輯處理機等技術,具有速度快、精度高的特點,有效接收距離達740km以上,是機載雷達的兩倍,能在蘇聯海上長程偵察機的雷達有效偵測距離以外就截獲其信號;ALR-74採用比振幅和干擾儀相結合的方法測向,作業頻率範圍涵蓋0.5~18GHz,分4個頻段,結合高功率信號、數據處理機和資料庫,可探測來自空中、地面、海上武器系統的雷達,能快速截獲敵方信號、進行分選、目標識別等作業,並且使E-2C在不發射雷達波的情況下進行電磁來源定位。由於加裝ALR-59/73,E-2C機鼻也因為加裝PDS的天線而增長53cm。 E-2的標準機組人數為五名,包括正駕駛、副駕駛以及三名位於後艙的戰管人員,分為雷達官(RO)、戰管官(CICO)與空管官(ACO),其中CICO在任務執行期間為全機的任務指揮官,負責指揮所有作業;ACO負責空中管制,並處理通信系統和衛星連線等;而雷達官則為預備的空管官,此外也是機上的武器官。如果任何一名戰管人員因故無法繼續執行任務,則由其它的戰管人員調整系統進行遞補。在飛機起降階段,飛機的最高指揮權則在正駕駛手中。 E-2C Group 0/1 E-2C的第一種主要改良型E-2C Group 0,第一架屬於此規格的是1976年12月出廠的第34號E-2C,最主要的改良是換裝APS-125雷達;比起APS-120,APS-125增加先進雷達處理次系統(ARPS),以新的數位式動態目標目標指示器取代APS-120的類比系統,自動化程度也增加了 ,後端系統也完整地整合了APS-125雷達與PDS被動偵測系統。ARPS使APS-125擁有更強的抗雜波能力、電子反反制能力與完全自動化的內陸操作能力 ,探測距離也有所提升。APS-125對高空轟炸機的偵測距離為741km,對低空轟炸機為463km,對低空戰鬥機408km,對低空巡航導彈269km,對船艦約360km。遭受干擾時,APS-120雷達的作用距離減少2/3,而APS-125雷達的有效距離只減少5%左右。APS-125的生產一直持續至1982年,而美國海軍所有的E-2C都在1977年至1984年提升至Group 0的標準。此外,為了防堵海上走私與販毒,美國海關也利用澳洲皇家海軍除役封存的P-3B反潛巡邏機加裝APS-125雷達,成為P-3 AEW藍色哨兵空中預警機,而美國海岸防衛隊也將一架C-130運輸機加裝APS-125,成為EC-130V預警機,這些改裝型預警機的電子系統配置都與E-2C大同小異。 在1983年新生產的E-2C飛機上又用新的AN/APS-138雷達取代了原先的AN/APS-125雷達。該雷達包括一個新的全發射孔徑控制天線,以便減少旁瓣,對付日益嚴重的干擾威脅。該雷達能探測1250萬立方公裡監視包線內任何地方的空中目標,同時監視海上交通情況。 從1983年出廠的E-2C又進行進一步改良,稱為Group 1,主要是換裝APS-138雷達。APS-138換裝一具新的低旁波瓣全孔徑控制天線、先進雷達處理次系統技術 、數位式移動目標處理器(MTI),由於減少了旁波瓣,靈敏度與抗雜訊干擾能力大幅加強,減低了在陸地與水面上空操作的虛警率以及被敵方干擾的機率,能同時追蹤/顯示250個目標的接觸點 ,雷達掃瞄面積約38.4萬平方公里,平均有效偵測距離約380km以上。APS-138還整合一具X波段敵我識別系統(IFF),能與ALR-73共同處理資料,及時反應電磁環境的狀況。至1987年,美國海軍所有的E-2C都提升至Group 1的標準,而美國海關的4架P-3 AEW也以APS-138取代APS-125。緊接著的改良型E-2C Group 1 update於1987年推出,換裝新的APS-139雷達與推力更大且更省油的T-56-A-427發動機。比起APS-138,APS-139強化了電子反反制與對小型目標的偵測能力,號稱能在320km外偵測到巡航飛彈。但是APS-139的生產僅到1989年就結束,旋即被更新型的AN/APS-145雷達取代。發動機方面,相較於原本的T-56-A-425,T-56-A-427的推力增加15%,燃油消耗量則減少13%,這使E-2C Group 1 update的滯空時間從E-2C的6小時6分鐘增為6小時54分鐘。 在1986年,美國海軍與格魯曼公司簽署價值1400萬美元、為期3年的先期研究合約,對於在E-2C機翼前緣、機身和水平尾翼翼面上安裝適形相位陣列雷達天線的可能性進行研究;不過這項研究在日後並沒有下文。 在1991年第一次波灣戰爭期間,美國海軍航空母艦上總共有27架E-2C飛機參戰,共出動1183架次,總飛行時數4700小時,除了擔負空中預警之外,也負責通訊中繼工作。在作戰期間,美國海軍發現E-2C的通信能力有所不足,為此日後便陸續追加衛星通訊能力,並進一步改良雷達系統來提高性能,而這些都呈現於Group 2規格中。 E-2C Group 2
一架E-2C Gropu2(N),此時仍使用原本的四葉片螺旋槳。E-2C Gropu2(N)機首都漆上 白色十字來提醒彈射器操作人員增加出力,因應此機較大的起飛重量。 1992年以後交機的-2C屬於更新的Group 2規格,原有的18架E-2C Group 1日後也提升為Group 2的水準。而前述美國海岸防衛隊操作的EC-130V由於經費被砍,便於1993年移交美國空軍,美國空軍接收此機後立刻將該機的APS-125雷達換成APS-145,編號則改為NC-130H,隨後擔任一些測試工作。 E-2C Group 2最重要的改良是換裝APS-145雷達,此雷達擁有新的低脈衝重複頻率(PRF)操作模式,成為E-2系列所配備的第一種兼具高、中、低頻三種模式的雷達,搭配一具赫茲爾坦公司的RT-988敵我識別收發器。APS-145仍使用八木旋轉天線,透過一個三 通道旋轉同軸耦合器將雷達與敵我識別器信號餽送至飛機內部的設備;雷達信號經赫茲爾坦公司OL-93/AP雷達信號處理器餽送至OL-77/ASQ中央處理器(由兩具L-304處理器構成,具有8個容量8192 byte的記憶體(可擴充為10個),此外有獨立的顯示用記憶體,容量為4096 bytes),而RT-988敵我識別收發機接收的信號則經赫茲爾坦公司OL-76/AP敵我識別探測/處理器餽送到中央處理機。 APS-145的雷達波束掃瞄範圍涵蓋水平半徑570km、垂直高度24.4km的範圍,總共達2500萬立方公里,雷達掃瞄面積則約102萬平方公里,將近為APS-138的三倍。APS-145的碟型天線的旋轉速率由6轉/分降至5轉/分, 最大偵測距離增至650km左右。由於使用新型環境處理器(Environmental Processor)以及三脈衝複頻技術(Triple Pulse Repetition Frequency),APS-145偵測陸地目標的能力較以往提升不少 。利用高速數位處理器,APS-145後端能模擬出4000個以上的都卜勒濾波器,在不同的回波長度與寬度上運作,可以根據與地面的相對速率過濾掉局部的強大地面雜訊,因此無論是的電子反反制能力與對抗地面背景雜波的能力 都比過去大幅提升,能有效追蹤地面上空戰機大小的目標(然而對雷達回波薄弱、經常隱藏在地形雜波中的小型巡航飛彈仍力有未逮),同時也保有APS-138/139的MTI。APS-145的自動化程度也進一步提高,藉由自動化的頻率選擇與顯示系統,AP-145能自動調整對地/對海掃瞄的最佳操作參數,不斷地變換掃瞄方式以及分割掃瞄區域,能完全自動處理而不需人力介入調整,大幅減輕操作人員的工作負荷。為了配合APS-145更遠的搜索距離,E-2C Group 2也換裝操作距離更長的APA-171敵我識別器,此系統能同時以多種模式操作,並具備自動干擾測頻器,當識別通道上出現電子干擾時立刻通知操作人員。與APS-145雷達搭配操作的仍為ALR-73電子截收裝置。在一般情況下,AP-145能在648km外偵測到大小如轟炸機的目標,在480km外偵測到戰鬥機大小的目標,在258km外偵測到巡航飛彈 ,並能同時監視空中與海上目標。拜後端處理能量大增之賜,APS-145雷達能同時追蹤/顯示超過2000個目標,並同時指揮超過40架在空戰機同時執行攔截接戰任務。 除了雷達之外,E-2C Group 2還有其他改良,例如換裝彩色的新型加強主顯示單元(Enhanced Main Display Unit,EMDU),具有一具內建的微處理器,能以視窗方式運作,並在地圖上顯示地形曲線,訊號處理能力較以往E-2C的顯示單元增加10倍;機上三個戰管人員面前 各有一具相同的AN/APA-172彩色顯控台,每個操控台都能執行所有的機能,因此當其中一個顯控台因故無法執行任務時,其功能便可立即調整至其他顯控台來遞補。AN/APA-172使用10吋(25.4cm)主顯示器顯示來顯示目標平面位置、速度向量等相關數據,並以5吋(12.7cm)輔助顯示器來顯示文字資訊,而人機介面包括鍵盤與光筆等。此外,E-2C Group 2的L-304中央任務電腦中增加一部強化型高速處理器(Enhanced High Speed Processor,EHSP),能增強真時(Real Time)追蹤能力,檔案處理能力也增加四倍,此外也在任務電腦中新增數位資料紀錄/複製器。E-2C Group 2還配備改良後的航艦用航空慣性導航系統二型(Carrier Airborne Inertial Navigation Sysgem,CAINS II),相當於在原本的AN/ASN-92 CAINNS一型中整合入GPS全球定位系統。機上其他導航系統包括AN/APN-153多卜勒導航儀、CP1085/AS大氣電腦、太康(TACCOM)導航儀等設備。。通信方面,E-2C Group 2配備聯合戰術資訊分配系統(Joint Tactical Information Distribution System,JTIDS)等,整合了HF/VHF/UFH波段的通訊設備,包括柯林斯無線電公司的AN/ARC-51A雙向超高頻無線電、AN/ARQ-158超高頻無線電、AN/ARQ-34高頻資料鏈和AN/AIC-14A機內通話系統等,並納入空軍Link-4A(對空軍軍機或空軍地面單位)、海軍Link-11(對艦艇、其他E-2C預警機等)及三軍共同的Link-16資料鏈,同時也整合了許多反反制設備,無論進行語音通訊或資料傳輸時都具有更強的抗干擾能力。E-2C Group 2新增的其他航電還包括標準中央大器資料電腦(Standard central Air data Computer)等。為了使機上新增的諸多航電系統順利操作,E-2C Group 2換裝功率更大的12ton機內空調系統。E-2C Group 2仍使用T-56-A-427發動機,起飛距離564m,降落滑行距離439m,航程為2852km。 由於改良階段不同,E-2C Group 2前後又分為四種次型,包括E-2C Grouop 2(X)/(N)/(M)/(C)等,主要差別在於電子偵測截收系統(PDS)、戰術顯示器、導航系統、自動駕駛系統等。其中,E-2C Group 2(C)是最新的次型,擁有最完整的規格,包括AM/ALQ-217電子偵測截收系統、前述改良型L-304中央任務電腦、ACIS/MFCDU戰術顯示器、ASW-50自動駕駛系統。通訊方面,E-2C Group 2(X)/(N)/(M)等次型都裝備2具高頻無線電(HF)、3具超高頻無線電(UFH)與一具極/超高頻(V/UFH)無線電,而E-2C Group 2(C)則將其中一具HF無線電拆除,換成一具ARC-210多通道數位無線電與高速戰術資料鏈,以配合JTIDS聯合戰術資訊分配系統。由於E-2C Group 2次型繁多,起飛重量也有不同,為了讓航艦彈射官順利識別機型並調整彈射器的蒸汽壓力,較早的次型E-2C Group 2(X)的機首漆上羅馬數字的II,而E-2C Group 2(N)開始的所有次型都在機首漆上白色十字。當然,日後所有的E-2C Group 2都逐漸往最新的(C)次型規格來升級。
E-2C陸續 換裝新型八葉片複合材料螺旋槳。 在1997年,美國海軍決定為所有的E-2C與C-2運輸聯絡機換裝漢米爾頓標準公司(Hamilton Sundstrand)的新型NP-2000八葉片複合材料螺旋槳,能降低噪音與震動 ,而換裝此種新型螺旋槳的E-2C/C-2就在型號後面加上NP,代表新螺旋槳(new propeller) 。新的複合材料螺旋槳由於葉片數量較多,可提高推進效率,此外刀狀的槳葉尖端設計則能延緩槳葉尖端轉速進入音速的時間(槳葉尖端接近音速時,產生的震波與氣流剝離就會使推進效率急轉直下),所以能在不改變發動機出力的情況產生更大的實質推力。此外,美國海軍在2004年初也打算為E-2C增添空中加油能力,使其滯空時間增為8小時,並研究是否將現行每艘航艦搭載的E-2C數量由4架增至6架。 到1991預算年度,美國海軍對E-2C的訂單已經累積到147架,其中已經交付的為120架。至2000年,美國海軍共有超過90架E-2C服役於13個航艦早期預警中隊(VAW),而每艘航艦搭載一個擁有4至5架E-2C的支隊。
E-2C鷹眼2000 在1990年代末期,E-2C又推出新的改良型,稱為E-2C鷹眼2000(Hawkeye 2000);而前述原為美國海岸防衛隊操作、後來移交美國空軍的NC-130H,便作為鷹眼2000研發工作的測試用機。E-2C鷹眼2000的主要改良項目包括提升型任務電腦 (Mission Computer Upgrade,MCU)、先進顯示控制工作站(Advanced Control Indicator Set,ACIS)、CEC協同接戰能力中的AN/USG-3機載終端設備、新的整合式衛星通訊系統 (SATCOM)、電子支援裝備等,並具備改良後的航電冷卻循環系統、導航系統、自動飛行控制系統(AFCS)、座艙航電與顯示等等,此外也改進了可靠度與維修能力。 鷹眼200的新任務電腦以雷松(Raytheon)公司的940型中央電腦為基礎,採用開放式架構並大量應用民間商規組件(COTS),此外也應用了與E-8C聯星指管機相同的DE2100 A500MP處理器。新任務電腦採用以COTS組件構成的戰術計畫資料/處理錄製單元(Loader/Recoder Unit),能紀錄任務過程的所有參數,所有戰術計畫及任務資料均儲存於抽換式卡莢(Removable Media cartridge,RMC)中,卡莢在執行任務前插入即可;事後進行任務歸詢時,便可透過卡莢紀錄反覆檢討任務得失。相較於L-304,鷹眼2000的新任務電腦無論在處理速度、資料傳輸速率與記憶體容量均比以往的L-304電腦大幅增加,運算能力提升15倍,系統重量卻只有L-304的1/2,體積減少1/3,而且後續的維修升級更為便利。 至於ACIS顯控台則是一種應用COTS技術的開放架構工作站,整合了海空通用的AN/UYQ-70先進顯控台,所有處理器、輸出/輸入介面及記憶裝置均安裝於一座全空調式模組機櫃中。ACIS的原型系統使用16吋高解析度彩色平面顯示器,正式量產型則改用20或21吋平面顯示器。AICS強大的顯示與運算能力,使鷹眼2000的管制人員能獲得更具彈性的顯示管理與影像控制能力。通信方面,鷹眼2000除了原有的HF/VHF/UHF通信設備及JTIDS外,還整合了新型整合衛星通訊系統,此系統擁有迷你型多工存取任務指派通訊器(Mini-DAma)及多重任務先進戰術終端機(Multi-mission Advanced Tactical Terminal,MATT),整合各波段的通信工作並透過衛星傳輸,使鷹眼2000具備超水平線的寬/窄頻語音通訊與數位傳輸能力,能與遠距離外各單位、載台進行通訊和資料交換;此外,JDITS的反干擾能力也進一步提升。 鷹眼2000另一項重要提升是增加協同作戰能力(CEC)中的部分功能,機上配備聯合接戰傳輸處理組(CETPS)中的機載版本,編號為AN/USG-3,又稱協同作戰空中通用裝備套件(CES),整套系統包含資料分配系統(DDS)、協同作戰處理系統(CEP)以及位於機腹的EFA電子導引集端發射天線,可執行CEC的資料中繼傳輸功能,直接傳輸射控等級的資料,讓友軍載台不需要本身偵測、鎖定目標的情況就能立刻發射飛彈接戰,能充分發揮飛彈的最大有效射程;由於另有專文介紹CEC,在此不予贅述。為了因應新航電系統進一步攀升的功率,鷹眼2000的循環冷卻系統也經過改良。雖然鷹眼2000仍使用APS-145雷達,但由於其他配套航電與後端任務電腦的大幅強化,鷹眼2000能將APS-145雷達的功能發揮至極致,偵測範圍較E-2C Group 2的同型雷達增加40%,並能改變雷達天線的轉動速率。為了配合雷達搜索距離的增加,鷹眼2000也進一步改良敵我識別系統以延長識別距離。相較於原本的E-2C,E-2C鷹眼2000外觀上最大的區別有二,第一是新衛星通訊天線(位於雷達整流罩頂端)的外型為倒扣茶杯狀(舊系統為半球狀),第二是機腹中央增加一個圓盤狀的CEC用EFA圓盤陣列天線 (直徑1.37m)。 鷹眼2000的整體工作能力大增,強大的資料處理能量使其不再侷限於原本的早期預警及指揮管制功能,而達到了聯合作戰指揮管制的水平。美國海軍在1999年4月訂購了21架全新製造的E-2C鷹眼2000,此批飛機中尚包括 台灣 購買的2架與法國購買的2架。第一架E-2C鷹眼2000在2001年10月移交美國海軍,第一批鷹眼2000機隊在2004年達成初始戰備能力(IOC)。 此外,美國海軍也計畫將54架現役E-2C升級為鷹眼2000構型。至於外銷的E-2C鷹眼2000無論是新造整機或升級套件,都不包括CEC相關設備以及新型整合衛星系統。 E-2D先進鹰眼 繼鷹眼2000後,美國海軍接著準備大幅度地改良現役的E-2C預警機,此提升計畫稱為先進鷹眼(Advance Hawkeye)計畫,升級後改稱為E-2D,要項包括機體的改良、雷達現代化計畫(Radar Modernization Program,RMP)、先進紅外線搜索追蹤系統(SIRST)、新的電子截收系統、高速光纖資料匯流排、導航系統、 新型任務資料處理單元、通訊傳輸等,並具有網路中心作戰能力(Network Centric Operations)以及USG-3協同接戰能力終端系統等,在未來網路化作戰的美軍中將扮演管制與資訊傳遞中心等重要角色。E-2D將換裝擁有20吋液晶平面顯示器的新型任務顯控台,而駕駛艙也改用三具17吋液晶平面顯示器取代過去的傳統儀表,而駕駛艙壁背面還加裝一具17吋戰術導航座艙顯示器(TNCD),能依照戰術狀況即時顯示空中管制(CNS/ATM)或狀況提示警報(ACAWS),讓後機艙內的戰管人員能共享某些最新戰情,而不需要分割自己面前的螢幕畫面。此外,駕駛艙的平面顯示器更將與機上任務電腦連結,因此在必要時,兩名機員都可以將螢幕切換為任務畫面,充當第四名戰管人員,不過受限於駕駛席的介面以及操縱桿、節流閥配置的關係,其操作效率將比不上後艙的專業顯控台。 探測方面,E-2D最重要的升級自然是換裝AN/APY-9先進超高頻相位陣列雷達 (Advanced UHF Radar,AURA,見下文),此外還加裝休斯公司開發的先進紅外線搜索追蹤系統(SIRST),能及時偵測、追蹤戰區彈道飛彈 。為了因應新型航電進一步攀升的供電與冷卻需求,E-2D還將換裝新的發電機與環境控制系統(ECS)。動力方面,E-2D仍沿用原有的Rolls Royce T-56A-427渦輪發動機,但加裝專用的輔助動力系統(PMU)來供應機上系統產生的電力,讓主發動機的絕大部分推力都用於推進,加上新型複合材料八葉片螺旋槳的加持之下,E-2D的整體飛行效能可望比E-2C Group 2略為提升。由於種種新改良使E-2D重量持續上升,所以E-2D的機首將漆上三角形標誌以提醒航艦彈射官調整彈射器出力 ;降落時,管制人員也藉由機鼻標示判斷E-2的機型與重量,進而控制適當的降落攻角。E-2D其他改良項目包括:使用新一代駕駛座椅減少長時間飛行值勤的疲勞,換用新型編隊燈來提高編隊時的空間感,改良空中加油時維持穩定飛行的控制軟體等等。 原本美國海軍將從現役E-2C系列中挑選75架翻修升級為E-2D,但 鑑於現役的E-2C使用頻繁,機體早已屆臨壽限,遂更改決議,75架E-2D都改為全新製造,這種情況與美國海軍MH-60R/S直昇機或陸戰隊AH-1Z/UH-1Y的情況類似。75架E-2D中,50架配屬於航空母艦的飛行聯隊中,25架則部署於備役中隊。原本美國每艘航艦的預警機中隊編制4架E-2C,換裝E-2D後將增為5架,以增加任務運用彈性。第一架E-2D原型機在2007年8月3日成功進行首度試飛,第二架原型機則在11月29日完成首飛,所有飛行計畫在2009年前完成,並從2009年開始進入初期低量生產(LRIP)階段。在2007年7月,美國與諾格集團簽署合約,訂購首批三架E-2D先期生產型(pilot production),總價值4.08億美元,在 2010年8月完成生產,原訂2011年開始服役,不過隨後推遲到2012至2013年服役,2015年達成初始作戰能力(IOC)。 在2010年2月4日,E-2D進行第一次航空母艦降落,順利在哈利.杜魯門號(USS Harry S. Truman CVN-75)上著艦。在2013年2月12日,美國國防部宣布E-2D正式進入全速量產作業,整個作業將於2020年 左右完成 ,屆時將全面汰換現有的E-2C Group 2系列。在2014年3月27日,美國海軍艦載早期預警機第125中隊(Airborne Early Warning Squadron 125,VAW-125)的E-2D機隊投入戰備,同年10月上旬達成初始作戰能力(IOC)。 除了美國海軍外,韓國、印度、法國、馬來西亞、泰國與阿拉伯聯合大公國都對E-2D表達了高度興趣。 E-2D雷達的關鍵技術發展:雷達監控技術計劃(RSTER) E-2D最重要的改良是換裝一具AN/APY-9先進超高頻相位陣列雷達 (Advanced UHF Radar,AURA),主承包商是洛克希德.馬丁集團的海軍電子與監視系統(Lockheed Martin Naval Electronics and Surveillance Systems, Syracuse)公司,其他主要合作夥伴包括諾斯洛普.格魯曼電子系統( Northrop Grumman Electronic Systems, Baltimore)與雷松航空太空系統(Raytheon's Space and Airborne Systems, El Segundo, California)。AN/APY-9雷達的主體是一具洛普.格魯曼電子系統負責開發的ADS-18先進固態電子掃瞄陣列天線(Advanced Detection System,ADS,型號為ADS-18) ,又稱為旋轉電子掃瞄天線(Rotating Electronically Scanned Array,RESA)。 E-2D的電子掃描雷達後端處理技術始於1980年代美國海軍開始發展的雷達監控技術實驗雷達 ( Radar Surveillance Technology Experimental Radar, RSTER),這項發展可追溯到1970年代後期美國國防部針對探測低空巡航飛彈的相關研究。在1977年,美國國防部先進計畫研究局 ( DARPA )開始與麻省理工學院林肯實驗室(MIT Lincoln Laboratory)合作,評估美國幾種巡航飛彈面對蘇聯防空網的穿透與攻擊成功率,此計畫主導權在1982年由美國空軍接管,並在1983年命名為「空中載具生存能力評估計畫」 ( Air Vehicle Survivability Evaluation program, AVSE )。在DARPA與AVSE等相關計畫的早期研究中 (從 1977至1984年),林肯實驗室團隊瞭解到巡航飛彈不僅本身雷達截面積低,而且飛行高度甚低,隱藏在地面或海浪等嚴重背景環境雜波中,對於防守方的探測雷達構成嚴峻挑戰;因此,原本是評估美國巡航飛彈突防能力的AVSE計劃,又衍生出許多相關或補充計劃,研究如何有效對抗這類低飛巡航飛彈威脅。美國海軍就是在1983年加入這些衍生自AVSE的計畫,希望提高船艦面對蘇聯巡航、反艦飛彈的能力。在1984年,美國軍與林肯實驗室團隊正式啟動雷達監控技術計劃 ( Radar Surveillance Technology program, RST program),而RSTER監視雷達就是這個計畫之下的主要目標,發展一種能夠有效對應地形、海面環境背景雜波的電子掃描陣列雷達 ( Electronically Scanned Array,ESA )。由於先前AVSE研究計畫顯示,大部分巡航飛彈可能使用的雷達匿蹤技術(包括外型、使用雷達波吸收塗料等)對於較高頻段如X頻最為有效,然而對於波長較低的頻段則由於波長長度先天特性而較不有效,因此波長較長的UHF波段是對抗巡航飛彈的合適選擇之一,而E-2空中預警機的雷達也向來使用這個波段。
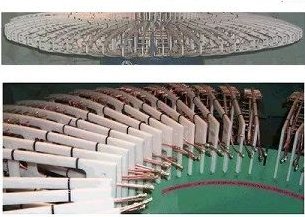
由西屋製造的RSTER電子掃描雷達原型,採用一個5x10m的陣面。 RSTER雷達原型的陣列天線委由西屋公司 ( Westinghouse ) 發展,雷達陣面5m、寬10m,陣面擁有14排天線通道, 每個通道上擁有24個輻射陣子,雷達旁瓣極低(使敵方干擾波難以進入)。天線陣列在水平方向以機械旋轉,靠著低旁瓣特性對抗電子干擾;垂直方向使用電子掃描,以數位自適應凋零技術 (Digital adaptive nulling ) 來排除干擾源。這具RSTER原型雷達的採用矽(Si)模組全固態發射機,同樣由西屋研製,發射機由14個功率模組構成,每個模組尖峰功率10 kw,平均脈衝重復頻率為300 Hz (最高可達1200 Hz ) ;整個發射機尖峰功率140 kw、平均功率為8.4 kw,占空比為6% ( 脈衝寬度200 ms、PRF 300 Hz )。在1991年,林肯實驗室將這組RSTER原型雷達組裝在緬因州卡塔丁山(Katahdin Hill)山頂,測試結果顯示此雷達無論是抑制背景環境雜波或人為電子干擾的表現都十分優異,超過技術開發要求上還超乎了當初的開發要求。在1992年,RSTER雷達在海軍在維吉尼亞州的瓦勒普斯島(Wallops Island)進行更多項目測試,包含探測、追蹤巡航飛彈以及檢驗抗干擾能力;在瓦勒普斯島的測試中,RSTER雷達多次成功展示在有人為電子干擾情況下,有效探測和追蹤具低雷達可視性的巡航飛彈,但這些目標都飛行在中高空,位於低空飛行的巡航飛彈則由於地面雷達高度有限、探測距離無法突破地平線。因此,美國海軍海軍和DAPAR開始研究把RSTER雷達相關的技術用在空中預警機的雷達上,使用預警機來探測低空飛行的巡航飛彈。在1993年以後,RSTER雷達參與DAPAR的山頂計劃( Mountaintop program ),將RSTER安裝在高度較高的山頂,測試此雷達俯瞰低空、在地面與海面背景雜波之中搜索小型低飛巡航飛彈的能力;在山頂計畫中,RSTER雷達原型在空-時自適應處理空/時訊號處理技術(excitationSpace-Time Adaptive Processing,STAP) 技術領域蒐集了大量資料,奠定良好的發展基礎。STAP 技術將雷達回波的時間差與相位差交叉比對,可將低空、低速的小型目標的微弱回波從地面背景雜波中分辨出來。對於預警機而言,雷達下視會探測海面或地面會遇到嚴重的背景環境雜波(來自地形或海浪)問題;另外,由於預警機平台本身隨時在高速移動,導致雜波頻譜大大擴展,使得目標回波更容易掩蓋在雜波中;最後,即便是具有極低旁瓣設計的機載雷達,敵方電子干擾源也可分析利用地型反射或散射,使干擾能量得以進入雷達主波瓣造成干擾;這些問題促使DARPA在山頂計劃裡大量蒐集用來支持STAP技術發展的各項數據。STAP是美國空軍E-8聯合目標搜索攻擊雷達(Joint Surveillance Target Attack Radar System,Joint STARS)的關鍵技術。
左為1993年部署在白沙飛彈試射場北奧卡拉峰(NOP)的RSTER-90雷達 (天線被旋轉90度),右為模擬機載雷達因移動而接收到的雜波的IDPCA 陣列。 在1993年,RSTER雷達從瓦勒普斯島搬移到新墨西哥的白沙飛彈試射場 ( WSMR ) 的北奧卡拉峰(North Oscura Peak, NOP ),這個位置海拔約8000英呎(2438m)高,距離底層沙漠有4000英呎(1219m)的高度差;依照林肯實驗室團隊的說法,此處雷達往下俯視時,受到嚴重的地形背景環境回波干擾,因此是個模擬測試預警機雷達下視的理想地點。在這項測試中,RSTER天線被轉了90度 ( 變成10m高、5m寬),稱為RSTER-90;此外,為了模擬飛行中的預警機載雷達接收回波會遇到的頻譜擴展問題,實驗中還會另外部署一個逆相位中心偏置陣列 ( Inverse Displaced-Phase-Center Array,IDPCA );IDPCA本身的線性陣面由72個單元構成,會依次發射輻射信號,製造出模擬機載移動雷達會接收到的反射雜波(其時、域特性與固定式雷達的回波不同),使得固定安裝在地面的RSTER-90雷達能模擬在高速移動的機載雷達所遇到的情況。在一次模擬實驗場景中,一架靶機( 模擬F-5戰機)在距離RSTER-90雷達154km處,由IDPCA陣列照射產生的反射雜波從同樣距離RSTER-90雷達154km遠的鑽石峰(Diamond Peak)返回並被接收;此項 測試結果顯示,在部署IDPAC陣列模擬機載雷達面臨的雜訊時,若使用STAP技術,仍可有效順利從雜訊中取得目標回波;而如果不用STAP技術,目標信號 就會被地形雜波掩蓋而無法提取。在1993年,RSTER雷達在北奧卡拉峰進行了各式各樣的實驗,為發展STAP技術累積不少寶貴數據。在1994年後,RSTER雷達被部署到夏威夷太平洋飛彈靶場( Pacific Missile Range Facility,PMRF)的考艾島(Kauai)的馬卡哈嶺(Makaha Ridge)和Kokee Park等制高點,模擬空中預警機的雷達系統。相較於白沙測試場的北奧卡拉峰俯視沙漠,RSTER雷達部署到考艾島上則俯視太平洋和太平洋飛彈靶場,更接近海軍預想的作戰環境。
在1996年1月,部署在考艾島Kokee山頂的RSTER雷達與一艘提康德羅加級飛彈巡洋艦伊利湖號(USS
Lake Erie CG-70)進行了協同接戰能力(CEC)設備的一次實彈試射,這是海軍巡航飛彈防禦先進概念技術演示 ( Navy Cruise Missile
Defense Advanced Concept Technology Demonstration, Navy Cruise Missile Defense
ACTD)的一個測試項目,又名為山頂(Mountain Top)測試;在測試中,RSTER雷達旁邊部署了一套MK-74艦載飛彈射控系統(含X波段照射雷達),探測到四架由考艾島發射的四架BQM-74E(三架以50英尺低高度飛行),透過CEC將探測資料時實傳給伊利湖號神盾巡洋艦(此時這些靶機位於伊利湖號水平線以下,該艦雷達無法直接探測);伊利湖號根據RSTER的接觸資料發射標準SM-2
Block IIIA防空飛彈並進行中途上鏈修正,標準SM-2飛彈接近目標時改由RSTER雷達旁邊的MK-74射控雷達接手終端照射,順利將四架靶機全數擊落,整個接戰過程中伊利湖號完全沒有使用自身雷達接觸目標,並締造標準SM-2防空飛彈首次成功攔截發射艦水平線以下目標的紀錄。「山頂測試」不僅驗證了CEC的整合火控能力,也充分展示RSTER雷達下視、從海面雜波中探測小型低飛巡航飛彈的能力。 未成的E-2D雷達天線選項:UHF頻電子掃描天線先進技術演示(UESA ATD) E-2雷達現代化計畫(RMP)的電子掃描天線,在發展階段曾有一個更先進選項:由海軍研究辦公室 ( Office of Naval Research, ONR)資助研發的54通道環形陣列天線 ,稱為UHF頻段電子掃描天線先進技術演示 ( UHF Eectronically Scanned Antenna Advanced Technology Demonstration,UESA ATD ),或 簡稱UHF電子掃瞄天線(UHF Electronically Scanned Array,UESA);此項目在1990年代末期展開。UESA天線不需要機械旋轉,單靠電子方式,就能實現360度全方位掃描。
美國海軍研究辦公室資助研發的UESA演示天線,天線由54個相鄰的通道構成, 涵蓋360度水平範圍,不需要水平機械旋轉。
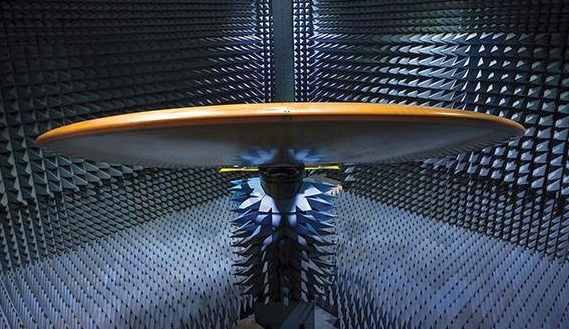
在電磁暗室測試的UESA天線 依照「Multi-Channel Electronic Scanning Module for an Ultrahigh Frequency (UHF) Circular Array 」文件中的記載,UESA後端固體發射機由50到60個碳化矽(SiC)發射模組構成,單一發射模組的尖峰功率為10 kw ;固態發射機經由饋線系統,將射頻功率饋給由相鄰的27個天線通道組成的天線子陣,進行發射和被動電子掃描 (passive electronic scanning )。另外,經過為UESA計劃發展的發射機/接收機轉換模組 ( T/R Switch Module ) ,以及集合了27個轉換模組的發射機/接收機轉換模組次系統,實現了27個天線通道與雷達發射機、雷達接收機之間的相連切換。依照此份文件,UESA有54個個收/發(transmit-receiver)通道,天線子陣列包含27個通道;每次360度水平掃描需經過54次重組天線子陣,電子掃波束以6又2/3 度 ( 360 / 54 ) 區間間隔,依序完成360度水平掃描 。在雷達工作的任何時間,全部54個發射機都會一起工作。 在早期設計階段,UESA曾有一種比較簡單的方案,每個天線通道透過饋線系統直接與某一個發射機模塊相連;而每個天線通道都附帶發射機/接收機轉換器,控制此通道與發射機模塊和接收機間的連結與切換;在這種方案下,每次有27個發射機啟用,一一對應到27個天線通道,依序使用27個相鄰發射機、分時完成360度掃描;此設計方案的發射機/接收機轉換模組較為簡單,缺點是在任何時間只有一半的發射機工作,實際功率只有帳面上發射機總功率的一半,十分浪費,所以沒有被採納。另一種設計方案則是將發射機規模減半,只由27個功率模組構成(總峰值功率 270kw ),整個雷達運作是配合含27個收/發轉換模組的轉換模組次系統;這種方案的發射機能量利用率雖然是100%,但整體功率只有原本的一半,因此也沒有被採納。 早期曾有期刊研究文獻指出,UESA的天線子陣包括20個天線通道,然而這顯然是不正確的;依照一份 關於協同接戰能力(CEC)縮減天線體積以及UESA發射機/接收機轉換模組發展的檔案( Project Title:CEC Antenna Miniaturization /UESA Switch Module Development )的記載,UESA的天線子陣列包含了27個天線通道,而後端雷達發射機的功率模組數量是54個,發射機的佔空比是6% ;由54個SiC發射模組構成的的後端發射機總峰值功率為 540kw, 輸出到27個前端天線通道。2001年有一份關於射頻功率元件技術領域相關的回憶錄裡(SPECIAL TECHNOLOGY AREA REVIEW ON RF APPLICATIONS FOR WIDE BAND GAP TECHNOLOGY)中,也出現關於UESA計劃的描述:此文件記載最終定型的UESA計劃,要求搭配的後端發射機所含的功率模組數量是54個,尖峰功率540 kw。 UESA項目完成了一系列地面雷達整合測試,並於2006年至2007年間製造出由108個單元、L波段運作的配套敵我識別系統 ( IFF )。然而,美國空軍認為第一代的UESA技術風險太大,所以沒有採用。最後,E-2C RMP確定採用技術比較保守、結合電子掃瞄與水平機械旋轉的ADS-18天線。 APY-9電子掃描雷達/ADS-18天線 ADS-18S電子掃描 雷達的主承包商是洛普.格魯曼電子系統(後來併入L3),並由L3科技公司(L3 Technologies, Inc. )旗下的L3 Randtron Antenna Systems負責製造與供應ADS-18S的陣列天線、雷達發射機與接收機。L3 Randtron Antenna Systems從1972年就是美國國防部的高質量天線供應商,在1982年成為Loral Corporation的一部分;在1996年,L3 Randtron Antenna Systems併入洛馬集團,在1997年又立刻與幾家洛馬旗下的公司整合成立L3集團。ADS-18S天線由18個收/發單元構成,其固態雷達發射機由10個功率各54KW的 碳化矽(SiC)功率模組單元構成,尖峰總功率540KW;雷達發射/接收機都設置在機體內,透過傳輸線路連接機背圓盤內的相位陣列雷達天線。
ADS-18的18頻道天線。此天線需要靠水平機械旋轉來涵蓋360度方位。 不同於UESA,ADS-18的天線需要水平轉動來函蓋360度方位,因此雷達罩與機體支架必須經由一個具備18個高功率UHF頻段傳輸通道的旋轉耦合器 ( 18-channel rotary coupler)連接,此外雷達上的敵我識別器(IFF)以及衛星通信(SATCOM)系統則使用額外的2通道和1通道旋轉耦合器,因此E-2D的旋轉耦合器總共有21個通道;比起先前APS-145雷達的三通道旋轉同軸耦合器(雷達、IFF、SATCOM各一個通道),E-2D的21通道耦合器自然更複雜也更重;依照公開資料,ADS-18電子掃描天線比先前APS-145雷達用的八木天線還輕,但整個APY-9雷達系統卻比APS-145雷達還重1200 lb,主要就是因為E-2D新旋轉耦合器增加的重量。對於機體承載力有限、又納入許多新設備的E-2D,如果旋轉耦合器變得更重,能分配給發射機的重量配額就十分有限。相形之下,UESA的天線不需要機械轉動,所以不需要安裝旋轉耦合器。為了控制重量,ADS-18的發射機規模必須縮減,無法像UESA一樣使用54個功率模組。在前述2001年一份關於射頻功率元件技術領域相關的回憶錄裡(SPECIAL TECHNOLOGY AREA REVIEW ON RF APPLICATIONS FOR WIDE BAND GAP TECHNOLOGY)中,諾斯諾普·格魯曼公司為ADS-18發展了新型輕量化固態SiC功率發射機,單一發射模組的功率從原先800W提高到1350W;如此,最後ADS-18的後端發射機雖然只有10個功率模組,總功率卻能維持在與UESA相同的540KW,而發射機總重應該比UESA還低。依照UESA發射模組的指標(佔空比為6%),如果ADS-18的指標沒有變化,則整個雷達的平均功率約為32.4KW,而原先APS-145雷達平均功率為4KW,因此ADS-18功率至少提高8倍;上述指標是在2000年前後所定,而如果ADS-18接下來發展時採用更先進的硬體技術,則指標還會更高 (一篇林肯實驗室發表、名為Technology in Support of National Security的文獻中記載,ADS-18佔空比水平為60dB)。 接收機方面,林肯實驗室團隊在1990年代中期完成了世界上第一個UHF波段全數位接收機,一開始這套系統打算用來取代現有E-2C預警機APS-145雷達的接收機;透過全數位化接收機,配合多通道天線 ( multichannel antennas ),使得APS-145雷達也能使用STAP技術。相較於未使用數位化技術的接收機,此種全數位化接收機的靈敏度大幅提升,使用數位濾波把瞬時頻寬( 4~5 MHz ) 以外的噪信去除;一個原本使用8-bit ADC、採樣頻率3-GSPS的接收機在數位化之後,能檢測更弱的25 db訊號 ( 或相當於達到12-bit ADC性能 )。E-2C RMP計畫的數位接收機後續發展的ADC性能顯然又進一步增強。 ADS-18S天線陣列能用電子掃瞄方式,讓波束能在120度的 水平扇區掃描(實際操作時,水平掃瞄範圍在90度扇區以內);結合機械旋轉,就實現了360度水平覆蓋,旋轉速率為每分鐘4.5或6轉,最大偵測距離超過300英里(483km),能同時保持對地面半徑200英里(321km)以及高度0到100000英尺(30480m)的空域進行搜索,其偵測範圍比APS-145增加 兩倍以上,而且能在更遠的距離偵測到小型目標。 APY-9操作頻率300 MHz~3 GHz,其後端使用CSP Inc FastCluster 2942處理器為基礎的先進探測資料處理器(Advanced Detection Data Processor),其波束筆直而集中(波束寬度約7度,旁波瓣比主波瓣低35dB),旁波瓣極低,故小型目標辨識能力、被敵方截獲機率、抗干擾能力均遠優於使用傳統八木天線的APS-145型雷達。APY-9採用 先進的數位波束成形,並加入前述空/時訊號處理技術(excitationSpace-Time Adaptive Processing,STAP) ,將雷達回波的時間差與相位差交叉比對,可將低空、低速的小型目標的微弱回波從地面背景雜波中分辨出來(過去E-2C的雷達僅利用地面相對速率來分辨移動目標與地形雜波,當飛彈橫越雷達波束時,其相對速率與地面回波接近,導致難以判斷), 並將有效偵測距離增加20%,更能有效追蹤隱藏在地形與海面雜波中的小型目標。APY-9採用單脈衝操作來提高精確度,並使用波束交錯(in-beam stagger)技術來消除傳統督卜勒率波的盲速(blind speed)問題。APY-9應用前述種種先進技術之後,顯然彌補了UHF波段先天上因為波長較長而使鑑別度降低的先天弱點 ,大幅強化探測低空飛行、受到地形與海面雜波掩護的巡航飛彈的能力。此外,機上裝有一具與APY-9匹配的MK-12敵我識別器(IFF),由英國航太(BAE System)製造 ,IFF天線陣列由36個 單元組成,能提供3個收/發通道;由於ADS-18電子掃瞄天線體積較小,因此MK-12的天線也能一併裝入機背圓盤型天線罩内,不像先前的E-2C必須將敵我識別器設置於另外的整流罩內,因而增加飛 行阻力。由於配合AN/APY-9雷達的21通道通道旋轉耦合器較為粗大,E-2D的雷達天線中央轉軸也予以加粗,並換用一個更大的天線支架外殼。 APY-9具有三種工作模式:在先進預警模式(Advanced AEW Surveillance,ASS),天線維持固定速率360度水平旋轉(轉速有每10秒、12秒、18秒一轉等三種選擇),天線旋轉 的同時,電子掃瞄陣列的波束也同時對其範圍內60至90度的水平扇區進行掃瞄;相較於固定波束的傳統天線,APY-9的電子掃瞄天線有效增加每次波束對同一塊空域的掃瞄機會,增加發現目標的機率並縮短確認目標的時間,對於截獲小型目標十分有利。 第二種增強局部掃描(Enhanced Sector Scan,ESS)模式 下,天線維持固定速率旋轉,轉到特定方位時,電子掃描波束會特別來回密集掃描數次,提高特定高威脅區域的目標更新速率。第三種是增強追蹤區塊(Enhanced Tracking Sector,ETS),用來探測雷達截面積小的巡航飛彈,此時天線停止旋轉,電子掃瞄天線專門針對30至90度的水平扇面進行密集掃瞄;甚至,如果發現雷達信號微弱且斷斷續續的匿蹤目標時,波束甚至可以停止所有的水平掃瞄,專門對準一個固定方位,強迫匿蹤目標現形。在「凝視」模式下,由於波束集中在一小塊扇區,因此有效探測距離將更遠,對小型目標的探測能力也大幅增加,但此時就無法對其他方位進行監視;幸好,透過CEC能力,即便其中一架E-2D正在使用ETS模式來密集搜索一小塊空域,仍能靠其他作戰平台的傳感資料來維持對戰場其他方位的掌握。據說在7600m的飛行高度上,E-2D能在320km以上的距離探測到小型巡航飛彈,而相同搜索區域內能同時跟蹤的目標是以前E-2C的3倍。 除了支援導控艦艇發射的SM-6防空飛彈之外,對航艦外圍的F/A-18E/F或F-35C戰鬥機而言,E-2D的超強偵測能力 資訊傳輸能力,可在戰鬥機的有效偵測距離外先行鎖定並將目標位置資訊傳輸給戰鬥機,使其充分發揮機上AIM-120空對空飛彈的最大射程。根據研究顯示,如能透過E-2D在遠距離先行提供目標射控資料,讓F/A-18E在遠距離上先行發射AIM-120飛彈,則能將其作戰效率提升六倍以上。更重要的是,憑藉E-2D大幅提升的對低飛小型目標偵測能力,結合CEC能力,將大幅提升對付巡航飛彈 或地對地戰書飛彈的能力;例如,由偵測能力強大的E-2D先截獲靠著地貌隱蔽飛行的巡航飛彈,將相關資料傳輸給後方的友軍戰機或艦艇,使這些擁有火力的載台得以在本身感測器範圍之外就搶先發射AIM-120C7或SM-6飛彈,再由E-2D透過CEC對這些飛行中的飛彈實施資料更新與導引,直到命中目標。 基於這種概念,結合E-2D預警機強大雷達能力和CEC,美國海軍也隨之推行海軍整合射控防空計畫(Naval Integrated Fire Control-Counter Air,NIFC-CA),透過預警機與船艦等大型載台之間以CEC即時分享所有感測器獲得的整體戰場空域態勢,然後以Link-16等頻寬較低的資料鏈再分享情資給空中的艦載機(F-35C、F/A-18E/F、F/A-18G咆哮者電戰機等);如此,所有作戰網路中任何節點都能發射艦載防空飛彈(水面船艦)或空對空飛彈(在空戰機),攻擊CEC網路所提供的任何目標。 不過,現階段E-2D由於缺乏為飛彈實施照明射控的X波段硬體,因此目前不能直接為空中的飛彈實施終端照射,這對半主動雷達終端導引的SM-2防空飛彈造成限制。在1996年美國在夏威夷海域舉行的Mountain Top演習中,便演示了透過CEC能力,由空中預警機為後方神盾巡洋艦發射的SM-2防空飛彈提供照射的能力,不過當時是以一個放在夏威夷Kauai島Kokee山頂上的地面設施來模擬具備CEC和照射能力的空中預警機,包含APS-145雷達、CEC終端設備與MK-74飛彈射控系統。而在先前被取消的先進空對空飛彈(AAAM)計畫中,就曾包括發展一種可掛載於E-2C預警機的X波段全方為(360度)照明莢艙,為準備替代鳳凰空對空飛彈的AIM-155來提供終端照射;不過,當時這個照射莢艙重量高達340kg,掛載之後將嚴重影響E-2C的飛行性能與續航力,而這類體積重量問題必須等到應用微波積體電路(MMIC)的主動相位陣列天線照明雷達實用化之後才能解決。然而到目前為止,美國似乎沒有為E-2D研發專用X波段照明雷達的計畫,可能是額外的裝備還是會影響 飛行性能與續航力(而且E-2D已經搭載了一套重量超過300kg的AN/UGS-3 CEC終端設備),而且新一代SM-6艦載防空飛彈具有主動雷達尋標器,E-2D只需透過CEC來為SM-6/AIM-120 C7等主動雷達導引飛彈(都有資料鏈)提供中途資料更新,就能達成完整的超地平線攻擊能力,因此現階段增添照明能力的必要性似乎不高。 雙波段(UHF/S頻)電子掃瞄雷達
北星科學公司發展的UHF/S機載雙頻電子掃瞄雷達的天線在電磁暗室進行測試。
雖然前述的UHF電子掃瞄雷達(UESA)未能被E-2D採用,但美國海軍仍持續進行相關的基礎研究。約在2010年代,美國海軍持續與北星科學(North
Star Scientific)公司合作發展高 增益UHF電子掃瞄雷達(High-Gain
UESA)項目,並且新增一套S波段電子掃瞄雷達,成為一種雙波段雷達,並能整合到E-2D現有的APY-9雷達系統架構中(天線外型等無須變更)。在UHF/S雙波段工作體制之下,UHF頻雷達(400
MHz)以空時自適應處理(space-time adaptive
processing)的技術,將低空飛行以及低雷達截面跡目標的微弱信號從地面/海面背景雜訊中分離出來;當UHF頻雷達發現可疑目標之後,立刻透過波長更短、鑑別度更高的S波段(頻率2.3~3.7
GHz)雷達進行長程精確標定。S頻雷達的後端處理程序包括雙偏振極化(Dual-Polarization,Dual-Pol)測量,同時在水平與垂直方向發射/接收脈衝信號,因此回波頻率包括目標的水平與垂直軸向信息,能更精準地測量目標尺寸與外型;在雙波段雷達運作時,S波段雷達需要通過UHF波段,對於Dual-Pol操作構成挑戰。北星科學公司表示,這種UHF/S雙波段電子掃瞄雷達成熟之後,會革命性地提高美國海軍乃至空軍早期預警機隊的能力。 鷹眼的外銷 E-2系列雖然一開始僅是為了美國航艦的需求而設計,但是其基本設計良好、功能完備、提升空間大,經過多年改良後被證實也很適合在陸地上空操作,加上價格適中,因此被許多西方國家採用,成為全球最暢銷、數量最多的空中預警機。除了美國海軍以外,其他操作E-2系列的國家包括以色列(14架)、日本(13架)、埃及(5架)、新加坡(4架)、法國(2+1架)以及 台灣(4+2架)等,其中多半是交由空軍操作,唯法國海軍購買的2架E-2C Group 2則配備於戴高樂號航空母艦上。以色列的E-2C曾在1982年貝卡山谷之役中指揮以色列空軍進行接戰,這是除了美國海軍以外E-2C的主要實戰紀錄。 鷹眼2000方面,除了台灣與法國在1999年購買新造鷹眼2000(法國1架、台灣2架)之外,日本與埃及已決定將其擁有的E-2C機隊提升至鷹眼2000的標準,日本在2001年購入第一批兩套鷹眼2000升級套件,隨後並陸續將航空自衛隊的13架E-2C全數升級為鷹眼2000的標準。在2004年,印度開始與美國洽商購買6架E-2C鷹眼2000,但由於美方對此案有許多輸出限制,導致全案在2006年初告吹。在2005年初,阿拉伯聯合大公國也宣布將引進5架由美國海軍汰換下來且經過翻修升級的E-2C空中預警機。 在2014年,日本向美國申請購買首批四架E-2D。在2015年6月1日,美國國防安全合作局(DSCA)公布一項可能軍售,批准出售4架E-2D給日本,總價值17億美元;這四架依序在2015年11月、2016年7月、2018年6月以及2018年10月獲得日本防衛省批准購買,第一架在2019年3月29日舉行交付日本航空自衛隊的儀式。在2018年10月12日,日本防衛省宣布訂購後續9架E-2D,總金額31.35億美元,因此日本航空自衛隊原有的13架E-2C會被E-2D以1:1替換。日本定購的首批四架E-2D沒有安裝CEC的AN/USG-3B終端,後續增購的則打算追加。日本在2010年代後期建造的兩艘摩耶級神盾驅逐艦裝備了CEC,是日本海自首度引進CEC;結合具有CEC能力的E-2D,可以導引摩耶級發射標準SM-6防空飛彈,攔截水平線以外的巡航飛彈。在2023年3月7日,美國DSCA公布一項對日本的可能軍售,進一步出售5架E-2D給日本,總值約13.81億美元;外界推測日本第二批五架E-2D可能會裝備CEC,不過DSCA公開的品項中並沒有包括CEC的AN/USG-3B機載終端。 台灣的E-2T 美國在1990年代初期批准出售台灣4架E-2空中預警機,不過一開始只打算將美國海軍汰除庫存的E-2B換裝APS-138雷達,成為售予台灣的E-2T,經過台灣極力爭取後,美方才同意出售全新製造、使用當時最新規格且配備APS-145雷達的E-2C Group 2。由於當時台灣對外軍購仍十分困難,為了掩人耳目,美方仍以E-2B翻修加裝APS-138雷達的名義記載此一軍購案,至今西方媒體也沒有更改資料;然而,實際上除了鼻輪艙蓋等少數無關緊要的零件「象徵性」地採用E-2B拆下來的舊品之外,E-2T骨子裡就是不折不扣的新造E-2C Group 2。此案在1993年5月正式簽約,第一架E-2T於1995年5月9日在格魯曼公司公司交機,前兩架E-2T於1995年9月3日運抵台灣,後2架則於同月23日運抵,4機於同年11月22日正式成軍。由於美方拒絕提供,這批E-2T並未裝備資料鍊系統,至2002年美國才同意配合 台灣的博勝專案(三軍資料鏈建置),售予台灣JDITS聯合戰術情報分配系統 的台灣專用簡化版本(包含Link-16),配備於台灣空軍E-2T、F-16等機種上。一開始台灣空軍僅4架E-2T構成的預警機隊,無法隨時保持一架在空機,因此 機隊只在必要時升空警戒,因此台灣隨後便規劃擴充預警機隊的規模。 在1999年7月31日,美國正式同意售予台灣2架E-2T鷹眼2000型,兩架分別於2004年8月與11月交機,並在2005年圖入服役 ;連同兩架鷹眼2000一同購入的還有若干備用系統,包括2具備用的APS-145雷達、4具T-56-A-427發動機、2套OE-335/A天線組、2套鷹眼2000的改良型任務電腦/ACIS工作站/被動截收系統。與美國原版的鷹眼2000相較,台灣訂購的鷹眼2000除去了CEC終端設備以及衛星通訊系統(當時這兩項設備都沒有出口紀錄),並加裝前述的簡化版JDITS設備;此外,由於這兩架鷹眼2000擁有新的八葉片複合材料螺旋槳,因此完整型號應為E-2C鷹眼2000NP。此外,台灣現有四架E-2T也從2004年11月起由諾格集團進行改良,升級為鷹眼2000的規格。 |