超大型水下無人載具(XLUUV)
英國國防部在2019年4月16日公布超大型水下無人載具(XLUUV)項目發展計畫,此為英國國防部公佈的概念示意圖。

在2020年3月,英國MSubs Ltd公司獲得合約發展XLUUV的原型載具Manta。
此照片為MSubs現有的S201水下無人載具,MSubs會以此為基礎研製體型更大、續航力更長的Manta

MSubs Ltd公司的XLUUV原型載具Manta正在英格蘭西南海域試航,攝於2021年上旬。
在海上測試中的Manta載具。

Manta載具收容在皇家勤務艦隊蒙福特灣號(RFA Mounts Bay L3008)的泛水塢艙裡,準備載運到測試海域,
攝於2021年3月21日。注意到Manta載具被固定在一個用來收放的浮泊平台上。
(上與下)MSubs Ltd公司網站上兩種XLUUV的概念圖

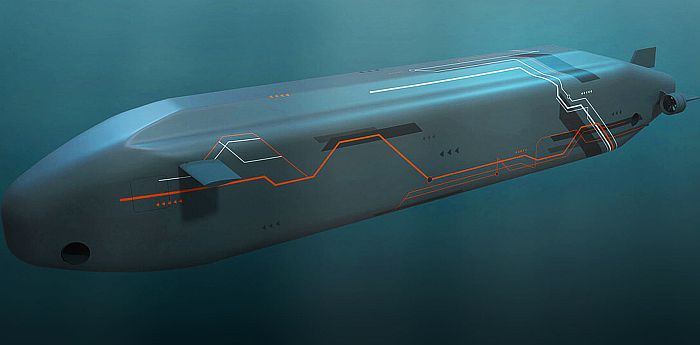
英國國防部在2022年1月啟動名為「鯨魚座」(Cetus)的超大型水下自航載具項目的想像圖,
整個載具可以收容於40英尺集裝箱(FEU)裡,快速運輸與部署。在2022年12月1日,
MSubs Ltd獲得皇家海軍合約,設計建造第一艘鯨魚座XLUUV載具。
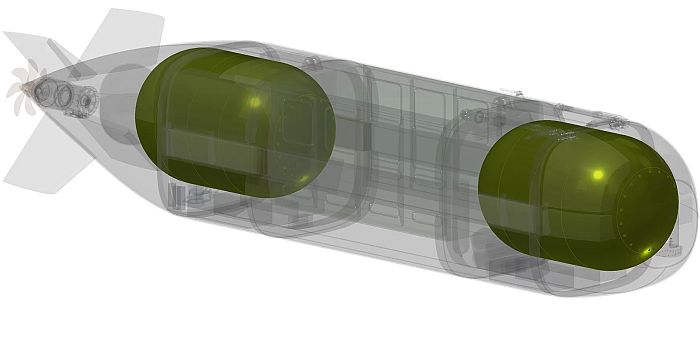
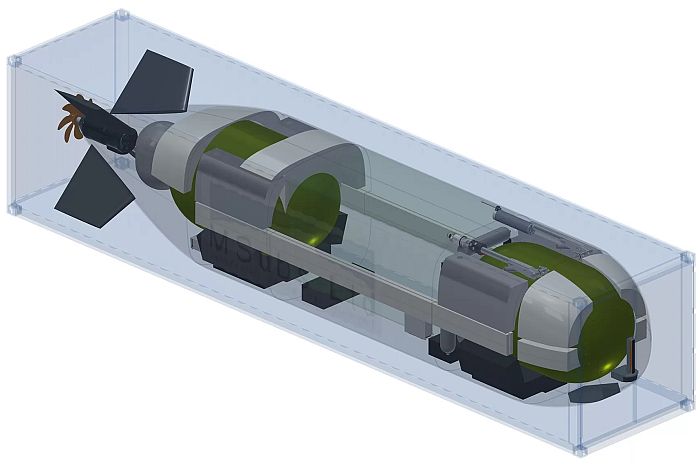
(上與下三張)鯨魚座載具的基本結構;前、後各有一個耐壓艙區來容納載具本身的導航、
控制、探測、推進電機等,中間是用來安裝任務模組的籌載艙區。

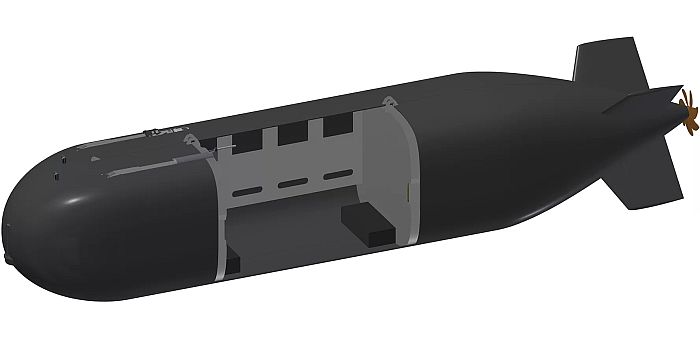
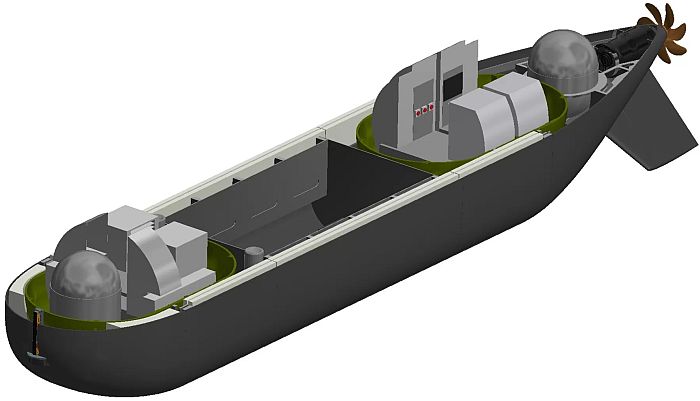
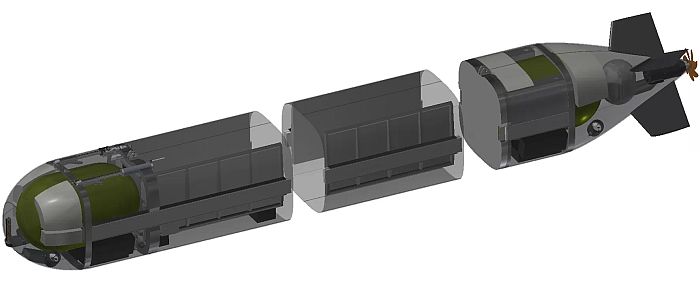
鯨魚座載具採用模組化設計,必要時可在載具中間插入額外的分段模組,容納更多電池來提高續航力。

2023年9月在倫敦舉行的防衛裝備展(DSEI 2023)中展出的1/10鯨魚座載具模型。

(上與下)首艘鯨魚座原型載具於2025年2月28日下水。



首艘鯨魚座原型載具在2025年5月15日舉行命名洗禮儀式,命名為神劍號(XV Excalibur)
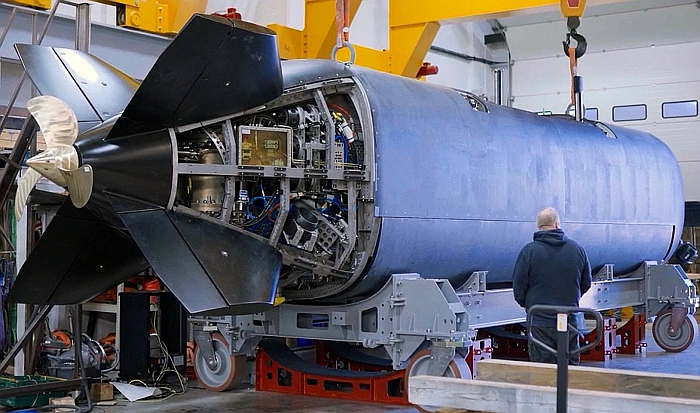
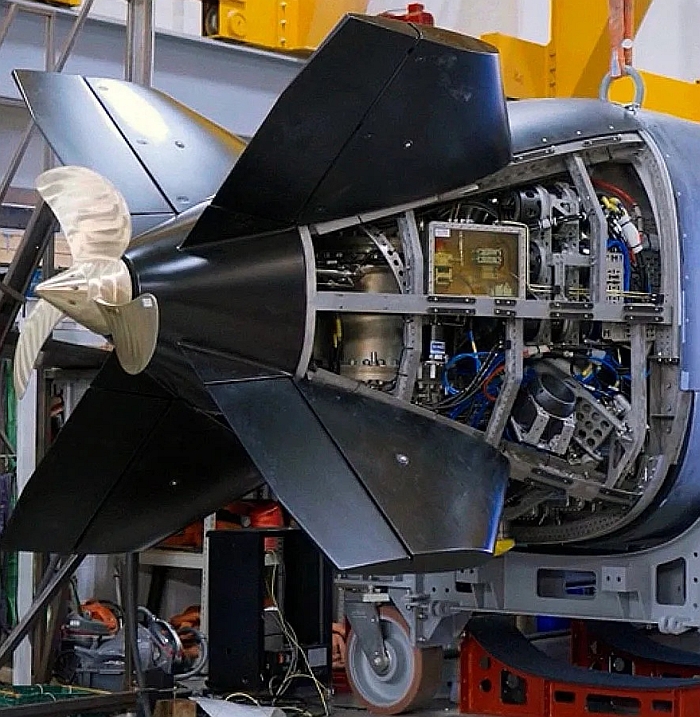
(上與下)整備中的鯨魚座原型載具,此時尾部外殼是打開的。

航行中的神劍號
──by Captain Picard
|
在2019年4月16日,英國國防部宣布將展開超大型水下無人載具(Extra Large Unmanned Underwater Vehicle,XLUUV)項目,目標是能持續在海上作業三個月、航行3000海里。英國國防部同時宣佈啟動一個競爭計畫,由英國國防部防衛科學與技術實驗室(Defence Science and Technology Laboratory,DSTL,與美國DARPA類似)負責,目標是取得一種無人水下系統,滿足前述長時間水下自航任務的需求。DSTL要求有意競爭者需在同年6月11日之前繳交提案,目標是2019年8月正式選定獲勝的廠商團隊,並與該廠商簽署價值250萬英鎊(約330萬美元)的合約。依照此計畫,XLUUV原型的設計、製造與測試工作維持三年,競標獲勝廠商以一年的時間,基於現有的商規水下載具進行研究、設計與修改,完成一艘XLUUV原型,隨後交由DSTL與皇家海軍單位進行為時2年的測試。此外,英國國防部還希望獲得進一步200萬英鎊的經費進行後續測試,不過以當前英國國防部困窘的財源,這恐怕很難實現。 值得一提的是,在英國國防部宣布XLUUV計畫之前,美國海軍超大型水下載具(Extra Large UUV,XLUUV)項目才在2019年2月13日與波音簽約,由波音負責設計、建造四艘虎鯨(Orca)大型水下自航載具,是基於波音現成的回聲航海家(Echo Voyager)載具為基礎。由於美國與英國發展的時間點相近,就連計畫名稱都一樣,因此或許英國將會與美國一同進行發展,以分攤研發與購置經費。 依照DSTL的要求,XLUUV載具必須提供約70立方英尺(2立方公尺)的內部容積來裝載各種任務模組,包括感測器、其他任務裝備等,任務籌載總重為2公噸。XLUUV的主要任務是情報蒐集,能自主離開港口基地、自航至任務區域作業,在無須人員介入協助的情況下在海上自主操作至多三個月。XLUUV能探測水下的敵意目標(如敵方潛艦),並將情資回報給岸上指揮單位,大幅提高皇家海軍的反潛監視與作戰能力。 這項計畫主要目的是協助皇家海軍瞭解關於XLUUV在未來作戰中的潛力與作業方式。依照DSTL公布的文件,XLUUV載具的水下聲噪極低,設計原則應用開放式系統架構,能輕易整合各種第三方系統、抽換感測器以及其他種任務裝備。依照DSTL的文件,XLUUV項目的可能任務範疇包括偵察與監視(reconnaissance and surveillance)、水下資料蒐集、籌載施放回收、遠隔自動感測與警告(remote automated sense and warn)等能力,相關籌載選項包括光電感測器、電子戰、通信設備、電子截收設備、能在相當距離進行反潛作戰的聲學/非聲學監視傳感系統。 DSTL的文件列出三種可能用來評估UUV以及無人自航控制系統的轉換任務情境,涵蓋情報蒐集、組成一個反潛作戰屏障、部署與回收感測器籌載等: 1.監視海上作業區域交通:XLUUV從碼頭出發後,能自主在水下航行到預定的位置,在潛望鏡深度或更深的深度航行,然後在該水域持續作業至多三個月,監視附近海上交通狀況,蒐集資訊的感測器包括水面上(雷達等)、水面下(聲學)、光電探測系統。在作業期間,XLUUV可以在附近海床坐底,然後施放由信號纜線連接的傳感器到潛望鏡深度。在這類任務期間,XLUUV必須能識別出某些需要特別關注的目標船隻出現,如果發現這類目標通過,就回報相關接觸信息,然後持續進行監視任務。 2.提供反潛作戰屏障:XLUUV在水下渡航抵達預設的檢查點(checkpoint),然後在預設的反潛作業水域持續值勤三個月。XLUUV透過搭載的聲學感測器監視周遭水下環境,辨認出特定類型目標(如敵方潛艦)的聲學特徵後進行監視,判斷是否有敵意,回報相關接觸信息,然後繼續進行巡邏任務。或者,回報接觸信息之後,岸上單位可重新設定這艘XLUUV的任務。 3.部署籌載的感測器在海床上,一段時間後找到感測器並回收:在這種任務中,XLUUV渡航到作業水域外圍,升起桅杆等待信號。如果接收到控制單位發出的行動信號(go code),XLUUV就下潛到作業深度,移動到預定作業位置,然後在海床投放感測器籌載。隨後XLUUV離開作業水域,上浮到潛望鏡深度升起桅杆等待信號,透過資料鏈發出「完成」代碼(complete code)給控制中心,然後返回基地。一段時日後,XLUUV可回到最初投放感測器的位置,在海床上找到感測器並回收,帶著感測器返回基地。
原型載具:Manta
MSubs的S201水下無人載具 在2020年3月5日,第一海相Tony Radakin上將在水下防衛與安全會議(Underwater Defence and Security Conference)中透露,皇家海軍已經與位於普利茅茲(Plymouth)的MSubs Ltd簽署合約,研製一艘原型水下載具用來研究、驗證XLUUV的相關技術,第一階段(Phase 1)合約100萬英鎊,包括基本的適航性測試以及基本的自動控制功能,如果初期測試順利就會執行第二階段(Phase 2)150萬英鎊的合約,進行各項任務能力測試,測試項目的複雜性以及挑戰性會漸進增加。這項採辦是在國防部防衛安全加速採辦部門(Defence and Securities Accelerator,DASA)體制之下,由英國國防部、民間業界與學術界緊密合作,加快新技術的研發、驗證與部署的速率。原型載具稱為Manta,長約30m,續航力可達3000海里,能連續航行三個月。 MSubs以該公司現有的S201水下載具為基礎來發展Manta。原本的S201是有人操作的載具,長度9m、重8.9噸,使用鋰電池儲能、帶動電動螺旋槳推進器,最大航速12節,能在305m深的水下持續作業48小時。在2021年4月20日,Manta原型潛艇首次亮相。 MSubs公司的MarineAI團隊負責研發Manta原型潛艇的人工智能(AI),將相關議題區分成數個部分,其中最具挑戰性的是任務管理;任務管理AI相當於無人潛艇的「虛擬艦長」,能在沒有人工輸入參數、修正的情況下完全自主運作。研發的重要過程就是「訓練」任務管理AI,直到這個AI能正確地自主執行各項任務、做出正確反應。在訓練過程中,MarineAI使用大型IBM AC922超級電腦,這是英格蘭西南區域最大的超級電腦系統;而Manta原型潛艇上的控制系統則小得多,裝在長、寬、高僅15cm的機盒,使用Nvidia的蕊片。 依照2021年10月初Navy Lookout的消息,MSubs宣稱,經過一段期間的測試與修正,此時Manta已經越來越可靠,控制精確度已經在20cm以內。Manta第一階段(Phase 1)試航已經證明能穩定維持在預設的深度持續作業,並依照預先設定的參考點航行,維持相當精確的航道並且能自動避開障礙物。此外,Manta在測試中也能部署250kg左右的籌載,包括施放微型水下載具以及水雷(不過在水下回收籌載並不包含在原始要求裡);隨著測試的進展,Manta裝上了聲納、攝影機等偵測裝置,納入航行控制之中。而在自主控制方面,目前Manta的AI決策判斷系統仍然比較像自動化(automated)而不是自主控制(autonomous)。 Manta預定到2022年4月可以完成第二階段(Phase 2)測試,而此時第三階段(Phase 3)測試的項目已經開始協商,有可能是實際與皇家海軍單位合作,例如與皇家海軍海事能力(Maritime Capability,MARCAP)單位進行整合操作,並進行作戰環境下的測試,或者參與英國SSN(R)下一代核能攻擊潛艦的初期降低風險研究。SSN(R)的初期概念設計階段,就包括評估是否要設置容納XLUUV的任務艙。 在2023年10月,Manta載具在康瓦爾海灘(Cornish beach)進行了一項「D-day」展示,模擬在大規模兩棲登陸作戰對灘頭水域進行偵察,並將偵察的資訊透過衛星資料鏈傳送到岸上的攜帶式作戰中心(Portable Operations Centre,POC)。隨後MSubs會對Manta載具進行維修改裝,並可能出售給其他國家海軍。
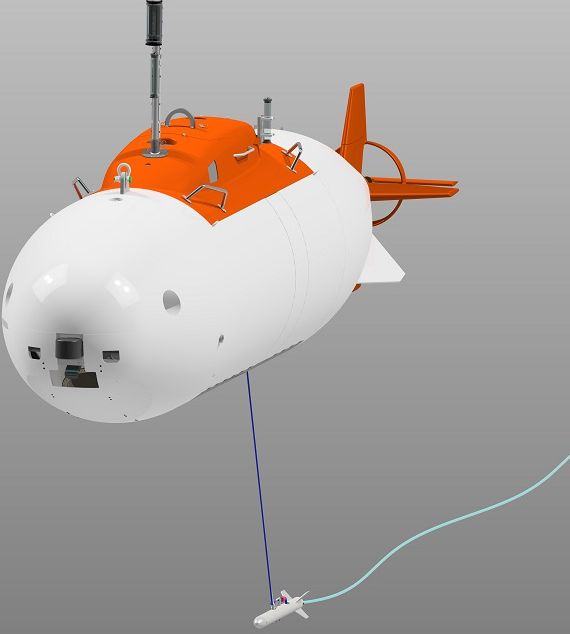
MSubs XLUUV原型載具Manta在英格蘭西南普利茅茲外海試航,攝於2021年。 英國國防部在2022年9月12日至22日在葡萄牙外海舉行的機器人實驗與海事無人系統原型(Robotic Experimentation and Prototyping of Maritime Unmanned System,REPMUS 22)演習中部署操作XLUUV,這是XLUUV首次在國際性演習中作業;在REPMUS 22演習中,XLUUV攜帶SEA公司的 Krait輕型拖曳陣列聲納系統進行部署,展現了XLUUV執行反潛作戰的潛力。Krait是SEA為小型水面船艦、無人載具所發展的輕量化拖曳陣列聲納系統。
XLUUV原型載具攜帶SEA Krait輕型拖曳陣列聲納的構型圖。 「警惕」前視聲納
在2021年11月初,Sonardyne公司以及Wavefront成功在的XLUUV原型載具上展示了警惕(Vigilant)前視聲納(forward
looking sonar)。此一展示項目屬於英國國防部DASA管道的無人水下載具測試平台-整合機會(Uncrewed Underwater
Vehicle Testbed – Opportunity to Integrate)的第一階段,由皇家海軍以及防衛科學實驗室(Defence
Science and Technology
Laboratory,Dstl)合作進行;這個競標作業主要是尋求基於商規現成技術(COTS)的水下感測器以及籌載裝備,適用於XLUUV無人水下載具,而「警惕」前視聲納就是其中一個選項。 到2022年,在XLUUV上測試過的籌載Sonardyne的聲納與SprintNav 水下導航系統、SEA的Krait拖曳陣列聲納、Vizguard光學軟體、Petard光電系統、Seiche的多波束聲納系統等。 鯨魚座超大型自航載具(XLAUV) 2019年皇家海軍啟動XLUUV項目之後,經過三年努力,英國國防部在2022年一月啟動名為「鯨魚座」(Cetus)的水下自航潛航器競標;此項目被要求能收容在40英尺標準集裝箱(Forty Foot Equivalent container,FEU)裡。「鯨魚座」是皇家海軍前鋒反潛作戰(Project Spearhead Anti-Submarine Warfare)項目的一環,該項目由英國國防發展局( Develop Directorate)與水下輸泳協會(Submarine Delivery Agency,SDA)管理。鯨魚座將配合皇家海軍發展中、未來接替機敏級(Astute class)的SSN(R)核子攻擊潛艦替換計畫。 在2022年12月1日,皇家海軍與先前研製Manta原型載具的MSubs Ltd簽署價值1540萬英鎊的合約(後續總值2150萬英鎊),為皇家海軍設計、建造第一艘鯨魚座XLUUV,預計在兩年內交付(BAE Systems以Herne載具參與競爭,結果落敗)。 鯨魚座會是皇家海軍水下輸泳協會的自航單元(Submarine Delivery Agency’s Autonomy Unit,SDA-AU)擁有的第一艘XLUUV載具。 鯨魚座XLUUV也是皇家海軍的「矛頭」(Spearhead)項目之一,這是一項關於未來核子攻擊潛艦(SSN(R),隨後改成一併與澳洲合作的SSN-AUKUS)的未來反潛作戰能力的概念研究;其中記載,皇家海軍需要在2040年代時擁有大量水下自航載具(Autonomous Underwater Vehicles,AUV);「矛頭」的無人水下載具包括鯨魚座(紀錄在Annex H)與卡律布狄斯(CHARYBDIS,記載於Annex F),後者是構築由系統結合成的反潛系統。Manta與鯨魚座的測試結果都會影響2025年皇家海軍整合防務審查中。 BAE Systems以前述Herne載具參與CETUS競爭,雖然落敗,但該集團仍會繼續發展Herne來針對國際市場,預計在2024年9月在波蘭進行海上測試。 Herne會以國際間潛在客戶的主要需求為訴求,如水下關鍵國家基礎設施(Critical National Infrastructure,CUI)的保護工作。 CETUS首艘原型載具最初預計在2024年11月首次試航,所有實驗與測試工作預計持續到2027年,整個項目前後花費六年。原本CETUS預計在2024年11月展開試航,但後來有所延後,原型載具在2025年2月28日水。在2025年5月15日,CETUS原型艇舉行命名洗禮儀式,命名為神劍號(XV Excalibur)。 鯨魚座估計長度約12m,直徑2.2m,排水量17至19噸,此時是歐洲最大、最複雜的軍用水下自航載具(UUV)項目。鯨魚座載具前、後各有一個耐壓艙區;載具中部設置一個大型籌載艙段,稱為主要模組空間(Main Payload Space ,MPS),長、寬、高皆約2m,模組籌載容積約9.5立方公尺。除了MPS之外,鯨魚座載具前部下方以及後部下方還有小型次要模組空間,用來安裝水下感測器模組。MPS艙頂部設有艙門,而底部也設有投放艙門,因此任務模組能從載具上方裝入MPS艙,並能在水下作業時,從載具下方艙門施放任務模組。鯨魚座可能搭載的籌載包括水下遙控載具(ROV)、在海床上作業的無人海底車輛(Autonomous Underwater Ground Vehicle ,AUGV)等等。在標準構型之下,鯨魚座載具可以收容於一個40英尺集裝箱(FEU)中,成為可迅速運輸與部署的模組。鯨魚其結構採用模組化設計,載具中間能根據任務需求加入額外的籌載艙模組,例如加裝容納更多電池模組的能源艙段,提高載具的續航力。鯨魚座的操作深度大於現有所有潛艦,續航力可達1000海里。先前Manta載具的各項測試經驗,都會結合到鯨魚座載具中。 在2025年7月中旬由澳洲、美國舉辦的護身軍刀(Exercise Talisman Sabre 2025)聯合軍事演習期間,位於英國本土達文波特的普利茅茲基地(HMNB Devonport, Plymouth)的神劍號在「海上大秀」(Maritime Big Play)系列展示中,由遠在10000公里外的澳洲控制中心指揮控制,這是XLUUV項目的里程碑事件。 「海上大秀」是一系列聯合實驗操演,著眼於整合機器人(robotics)以及自主作業(autonomous)系統用於海軍活動中;期間,神劍號、澳洲XLAUV項目開發的原型「鬼鯊」(Ghost Shark,主承包商是Anduril澳洲分公司), 以及另一種稱為劍齒(Spear Tooth)的模組化籌載XLUUV原型一同進行測試;此外,美國、日本、英國、澳洲也測試了先進水下聲學通信傳輸技術。澳英美三國聯盟(AUKUS)的基石二(AUKUS Pillar II)中,聯合發展與分享的關鍵戰略性技術包括水下無人載具。 在2025年10月下旬,神劍號首次測試Infleqtion公司使用量子技術的Tiqker鐘,提供精確度極高的精準導航與計時(Precision Navigation and Timing,PNT)。 在2025年12月上旬,神劍號的所有權正式移交皇家海軍。皇家海軍接下來建構的大西洋堡壘(Bastion Atlantic)反潛作戰網路中,神劍號這樣的XLUUV載具是重要的組成。 BAE Systems Herne超大型自航載具 |

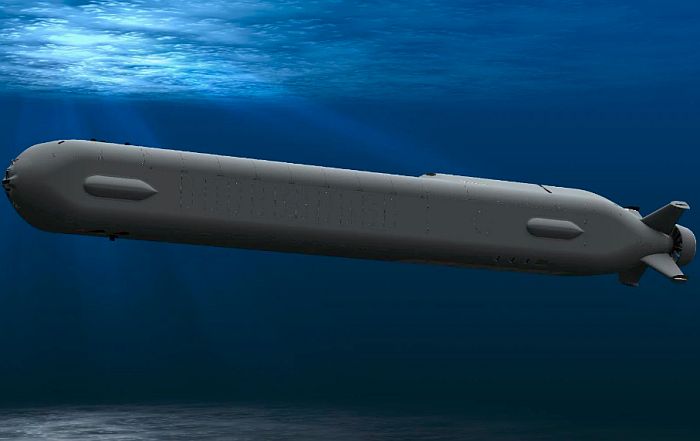
BAE Systems在2022年10月歐洲海軍展(Euronaval 2022)中展出的Herne超大型自航載具(XLAUV)
概念。BAE Systems以此參與英國國防部的「鯨魚座」(Cetus)水下自航載具項目,不過最後
英國國防部選擇了MSubs Ltd。此後,BAE Systems繼續自費推動Herne,並與加拿大細胞機器人
(Cellula Robotics)合作開發。

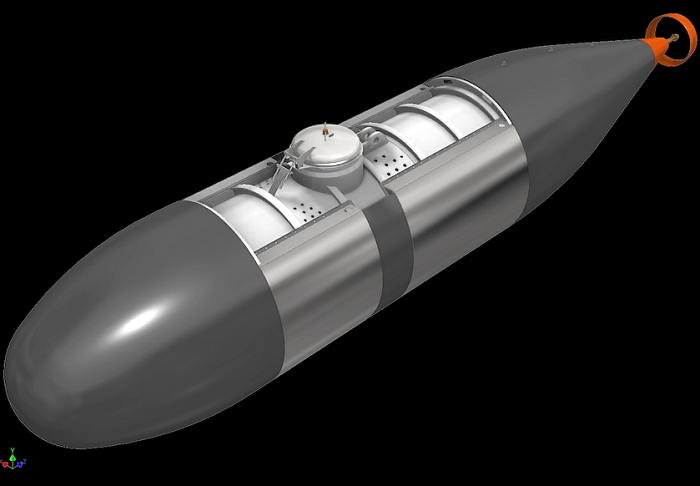
加拿大細胞機器人(Cellula Robotics)的商用Solus-XR潛航載具,最初開發用來進行海床探勘等工作。
BAE Systems與細胞機器人公司合作,直接以Solus-XR為基礎成為Herne的載具平台。

Herne載具的構型,中部非水密艙區用來裝置任務模組,總容積5000公升;載具頂部裝有情報偵察監視
(ISR)伸縮桅杆,後方有個通信桅杆。載具尾部有X型尾舵以及兩個主推進器。

Herne原型載具。載具前部有一對水平橫向推進器,此外還有一對水平舵。

後部看Herne原型載具。有一組X型尾舵,載具尾部設有兩個主推進器,此外還有一個垂直推進器與
一組水平推進器。

吊放入水的Herne原型載具

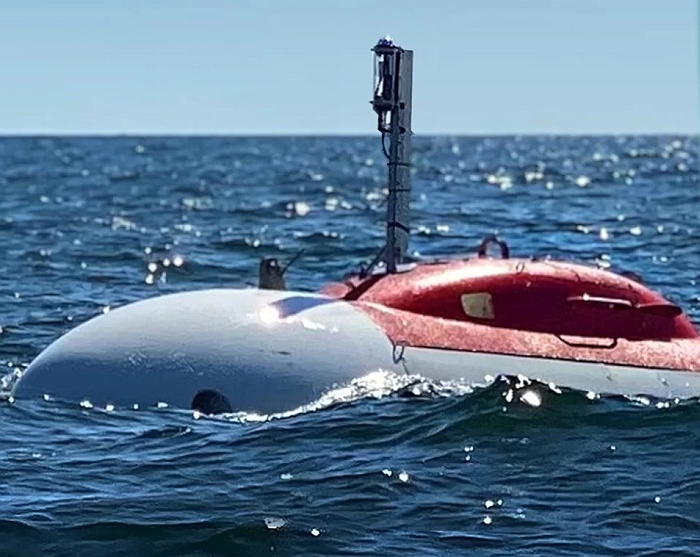
浮航中的的Herne原型載具,此時ISR桅杆未升起。

在英格蘭南岸浮航中的的Herne原型載具,注意ISR桅杆處於升起狀態。ISR桅杆後方可以看到通信桅杆。
在2025年9月倫敦防務裝備展(DSEI 2025)上,BAE Systems展出第三代的Herne Mk3,外型
、推進器與操縱面等構型又經過不少修改精進。
|
在2022年10月歐洲海軍展(Euronaval 2022)中,BAE Systems公布了Herne超大型自航載具(XLAUV)概念,作為BAE Systems針對XLUUV項目的概念展示平台。XLAUV包括全球部署、可運輸性、部署在平台上、長自持力,以及在大陸棚邊緣的深度工作等。XLAUV概念的主要任務包括監視(surveillance)、偵察(reconnaissance)以及追蹤,以網路方式和許多平台一同工作,具有極佳的匿蹤性,能在部署陣位執行很長一段時間。XLAUV的籌載以及任務能力十分重視彈性,可適應不同客戶的廣泛需求。XLAUV概念包含的任務籌載包括輕型拖曳陣列聲納、多功能桅杆、反水雷無人載具等;此外,還可以在海床上停留一段時間執行任務。 BAE Systems以Herne參與了「鯨魚座」XLUUV項目競標;雖然英國國防部在2022年11月選擇了MSubs Ltd公司,但BAE Systems仍持續自費推動,並與在商用深海潛航具領域的加拿大細胞機器人(Cellula Robotics)公司一同合作。隨後雙方合作開發的新版Herne架構比先前簡化,直接用細胞機器人公司先前已經驗證的Solus-XR潛航載具作為平台,再將BAE Systems開發的Nautomate無人系統控制結構(相當於大腦)整合於其上。
在2023年9月中旬倫敦的防衛裝備展(DSEI 2023)中,BAE Systems宣佈,與加拿大細胞機器人公司在2023年9月展開合作開發Herne水下無人技術展示載具,開始在溫哥華建造第一艘Herne原型,在2023年結束前下水;由於改用現成的載具平台,這個原型的進度十分快速,雙方展開合作僅僅11個月之後,就於2024年7月進行了首次潛航測試,隨後成功進行了一系列測試與展示項目。在2024年11月25日,BAE
Systems宣布,Herne載具近期在樸次茅茲(Portsmouth)水域達成一項里程碑,在英格蘭南岸完成一項為時二星期的自主航行展示,執行了一個程式預置(pre-programmed)的情報/監視/偵察(Intelligence,
Surveillance, and
Reconnaissance,ISR)任務。
Herne原型載具前部,注意首部兩策的橫向推進器。
Herne原型載具後部,注意X型尾舵、兩個主推進器以及一個貫通上下的 垂直向推進器。 注意尾部上方的通信桅杆,同時也作為一個舵面。 Herne的Solus-XR載具最初是設計來進行海底能源基礎設施的相關工作,因此工作深度大,能靈活操作。Herne載具採用輕量鋁合金骨架,全長12m,正面截面積約1.7平方公尺,全載具重量8至10公噸,具體重量取決於任務籌載以及使用的能源儲存模組。 Solus-XR載具前部有一對水平控制面,尾部有一組X型控制面。Herne載具設計上為中性浮力(neutral buoyancy),載具內的蜂巢結構內裝有泡棉,能提供的浮力大致相當於載具空重。載具內也有精巧的被動與主動壓載(ballasting)系統,自動調節與補償壓艙水量,使載具在水下航行作業時保持平衡。Herne載具的主推進系統包括兩個各自獨立的推進電機,各驅動一個推進器;即便其中一個推進器或電動機故障,也不影響另一組的運作;此外,載具前部與尾部各有一組水平推進器,載具後部有一組垂直向推進器,用來精確控制載具在作業時的移動。Solus-XR載具的持續航速約3節,最快能以8節速率短期衝刺,最大作業深度約3000m,遠高於任何一般的載人潛艦。Herne的電源由一組鋰離子電池供應,光靠載具標準的鋰電池組,持續作業能力可達7至10天;而如果需要更長的續航力,可在任務籌載艙裡增加額外的鋰電池單元。 Herne載具中部上方設置一個折疊式的情報監視偵察(ISR)桅杆,桅杆上裝置光電攝影機、截收天線等偵蒐裝備;水下航行時ISR桅杆倒放收容到整流罩裡,浮航時升起。此外,載具後部上方還有一個較小的通信桅杆兼作一個方向舵面,上面裝置資料鏈、衛星通信天線等。 Herne載具的前部與後部為水密結構,前部艙區裝置基本的導航、聲納探測以及Nautomate的控制電腦等,後部艙區設置包括推進電機、電池等動力裝置;載具中部則是非水密的任務籌載艙區,分為前、後兩個籌載艙區,每個容量約2500公升。由於Herne的的任務艙區都是自泛水區域,所有的任務籌載都必須封裝在自身的耐壓容器中。載具上的任務模組都能輕易抽換,只需移除4個螺栓以及2個資料連結介面,就能將籌載輕鬆移出;整個載具能在60至90分鐘內完成任務重構,包括安裝特定任務籌載以及配置適當的能源模組。Solus-XR載具有前、後兩個籌載艙區,兩個籌載艙區之間安裝鋰電池模組;必要時,籌載艙內也能重構成容量5000公升的大型單一艙區,容納一些大型籌載如324mm輕型反潛魚雷、水下自航載具、聲納陣列、水下自主地形車輛( Autonomous Underwater Ground Vehicles,AUGV)或者一個海床吸力錨樁(seafloor suction anchor)。執行反潛探測任務時,Herne載具也能攜帶細線型拖曳陣列聲納,或者安裝在載具本體的側面陣列聲納。如果發生重大的系統失效,Herne的備用措施包括浮到水面便於我方回收,或者沈入海底避免遭敵方取得。 此外,細胞機器人公司也曾測試水下氫燃料電池單元,能讓載具持續在水下航行45天(約5000km);這樣的長續航力,使Herne有可能參與深海大洋的反潛作戰任務,例如部署在格陵蘭-冰島-英國(GIUK)防線之間的水域來加強反潛探測密度。 Herne載具能裝入40英尺標準集裝箱(FEU)中,經由道路運輸、空運或海運快速運送部署,能由有人潛艦搭載到作業區施放,並能與Type 26巡防艦上的任務艙處理系統(Mission Bay Handling System)相容而輕易由船艦搭載以及部署收放,甚至能加裝降落傘而由A-400M運輸機直接空投入水。 在2025年9月於倫敦舉行的防務裝備展(DSEI 2025)中,BAE Systems展出Herne載具第三次演進(Herne Mk3)。與先前DSEI 2023公布的第二版相較,Herne Mk3的構型又經過不少修改與優化,長度稍微增加(但仍能放入40英尺集裝箱中),外型設計經過改進來降低流體阻力與噪音,收容伸縮桅杆的整流罩外型更融入艇體;前水平舵位置往前移,先前的兩具側面推進器被兩個螺旋槳推進器取代,原本的X形尾舵被較簡單的十字形尾舵取代。載具任務艙也經過優化,設置上部存取口,增加了籌載艙體積並更容易裝卸模組,能更迅速地轉換任務構型。 在2026年5月下旬,BAE Systems與Thales集團宣布,在Herne無人載具上整合Thales的模組化情報監視偵察桅杆,並預定在2027年進行國際性的性能展示。 大西洋堡壘 2025年6月中旬,英國國防部發佈一項業界通知,打算建構可部署、持續在區域進行反潛搜索的能力,在北大西洋上探測、追蹤以及嚇阻敵方潛艦,尤其是在關鍵的GIUK(格陵蘭-冰島-英國)防線上。依照英國國防部規劃,此項目分為兩階段,第一階段(Phase 1)稱為大西洋網路(Atlantic Net),基於承包商擁有/承包商操作/海軍監管(Contractor Owned, Contractor Operated, Naval Oversight,COCONO)的作業模式,由英國國防部簽約委託的承包商建立並操作反潛監視網;第二階段稱為大西洋堡壘(Bastion Atlantic),將第一階段的反潛網路轉移到政府擁有、政府操作(Government-Owned, Government Operated,GOGO)作業模式,主要的硬體包括皇家海軍推動的Type 92無人水面載具(Sloop)以及Type 93 夏洛特(Chariots)水下自航載具(UUV)等。 在2025年12月8日,英國國防部長約翰.希利 (John Healey)訪問樸次茅茲海軍基地時,透露了「大西洋堡壘」的願景,打算將皇家海軍各型有人船艦平台、各型新世代自主航行載具(包括水面的USV與水下的UUV等)以及皇家空軍P-8反潛巡邏機等平台,整合到一個基於人工智能(AI)的作戰網路中。
在2025年12月8日,英國第一海相(First Sea Lord)、皇家陸戰隊上將根·詹金斯 (General Sir Gwyn
Jenkins)爵士在倫敦舉行的國際海權會議(International Sea Power
Conference)透露,英國最快會在2026年在北大西洋部署首批作戰用水下無人系統,成為英國構建的水下偵察網路的初期要素。這反應皇家海軍快速邁向(有人/無人)混合艦隊(hybrid
fleet),也是英國建立大西洋堡壘(Bastion Atlantic)反潛防禦網路。
|