
法國無人作戰水下載具(UCUV)
在2023年5月,法國海軍集團獲得合約,開始發展無人作戰水下載具(UCUV)的概念以及關鍵技術。
此為概念階段的展示原型。

(上與下)海軍集團的無人作戰水下載具(UCUV)概念原型想像圖。


UCUV準備由母船上施放
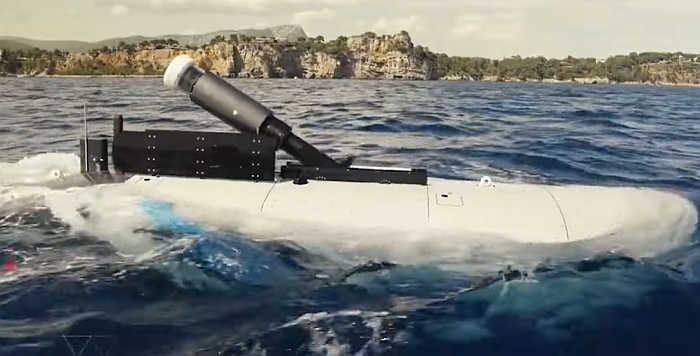
UCUV浮航的畫面,此時正在將偵測桅杆升起

浮航中的UCUV,桅杆完全升起

從水下拍攝浮航中的UCUV,注意艇尾的X型尾舵、垂直向安定面以及推進器。
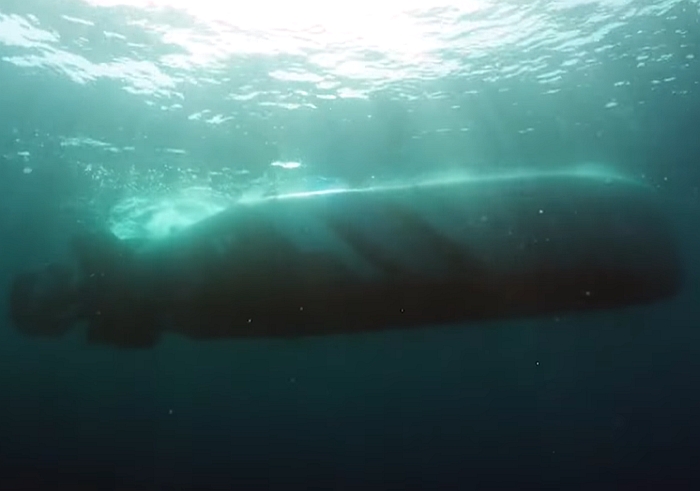
水下的UCUV
──by captain Picard
|
起源
在2023年5月4日,法國軍備總局(DGA)與海軍集團(Naval
Group)簽署協議,由海軍集團研究無人作戰水下載具(Unmanned Combat Underwater
Vehicle,UCUV)的概念、任務以及評估所需技術。在2023年9月,海軍集團完成了UCUV概念展示原型的海上測試認證,構成了此項目後續開發的基礎。依照DGA的目標,打算發展一種大型的長程無人水下載具進行技術展示,長度超過10m,重量超過10噸,與美國海軍發展的超大型無人水下載具(XLUUV)同級。
由後方看UCUV的尾舵,包括十字控制面以及一對垂直向的安定面。
浮航中的UCUV,此時通信導航桅杆升起。注意艇尾也有兩個通信天線。
浮航中的UCUV
剛浮出水面的UCUV。 在2024年7月,海軍集團與Thales集團簽約,為UCUV展示載具提供固定式聲納系統,這是載具上的一項關鍵聲學探測系統。此為一種全向(omnidirectional)被動聲納系統,包括一個圓柱狀的環景(panoramic)聲納陣列,以及整合控制單元及上面的作業軟體;此聲納系統能在周遭海洋環境中提供精確詳細的即時態勢圖像,使載具能安全地在海下航行以及下潛、上浮。此一聲納系統結合高性能信號處理、資料分析以及人工智能(AI),提供載具自主探測的探測、識別與定位能力。 |



