
ATAS、CAPTAS主/被動拖曳陣列聲納
法國Thales開發的CAPTAS主/被動拖曳陣列聲納示意圖,此為CAPTAS-2,拖曳陣列尾部的拖曳體可以改變
聲納部署深度;拖曳體連結著線性的被動聽音陣列,拖曳體前端還連結了主動聲納部位。而CAPTAS-4
的主、被動陣列則分別由不同的絞車施放。

CAPTAS MK-1是CAPTAS的輕量版本,整套系統與收放的絞車可以放置在一個標準集裝箱(20英尺)之中。

CAPTAS MK-1的主動可變深度聲納(VDS)在拖曳纜繩上部署的情況。CAPTAS MK-1的主動變深聲納與
線性被動陣列聲納都結合在單一拖曳系統裡。

展場中的CAPTAS-2的主動拖曳體模型,有兩個環形的主動發射器。

CAPTAS-4的主動聲納段,黃色結構上裝置四個環形的主動聲納換能器。
英國的2087型以及UMS-4249主/被動拖曳陣列聲納都使用CAPTAS-4硬體。

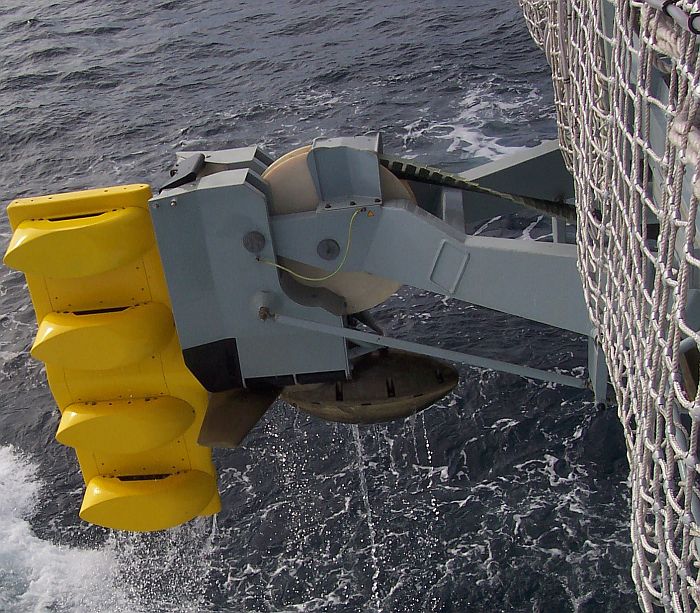
一艘英國Type 23巡防艦艦尾的2087型主/被動拖曳陣列聲納。黃色物體是
低頻主動聲納(LFAS)陣列,上面布置四個換能器。負責作業的絞車呈展開的狀態。
一艘英國Type 23巡防艦正在部署2087型聲納系統的低頻主動聲納
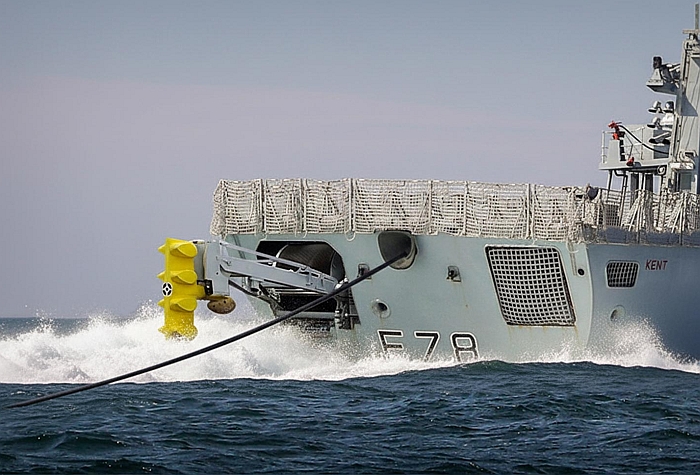
Type 23巡防艦肯特號(HMS Kent F-78)正在部署操作Type 2087拖曳陣列聲納,線性被動陣列從
艦尾中線的施放口放出,而艦尾右側的主動可變深度聲納絞車也放出了,但尚未降入水中。

一艘Type 23巡防艦艦的2087型主/被動拖曳陣列聲納正在作業,低頻主動陣列聲納正在觸水。

(上與下)法國FREMM巡防艦艦尾的UMS 4249主/被動拖曳陣列聲納的低頻主動聲納。


在絞車上的UMS 4249的低頻主動聲納,尚未施放出去。

在法國不列斯特(Bresta)生產設施裡的CAPTAS 4的主動聲納拖曳體。

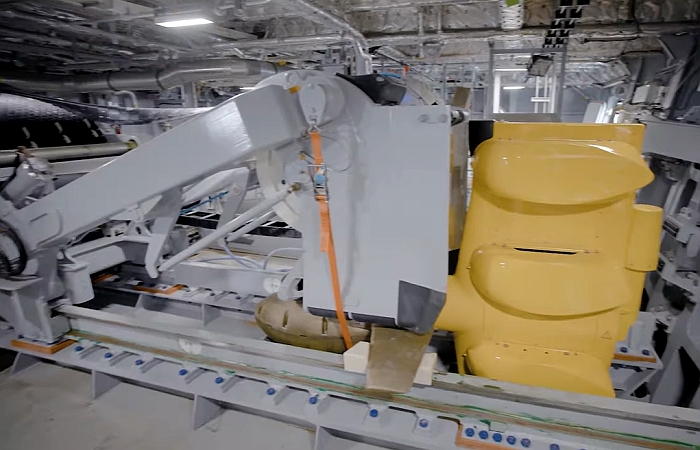
意大利第九艘FREMM巡防艦Spartaco Schergat(F598)艦尾艙內的CAPTAS 4主動拖曳陣列聲納的絞車與拖曳體。

(上與下)法國FDI巡防艦首艦羅納克上將號(Amiral Ronarc’h D660)的艦尾聲納艙,此為CAPTAS4
主/被動拖曳陣列聲納的主動可變深度聲納的 絞車以及拖曳體(黃色)
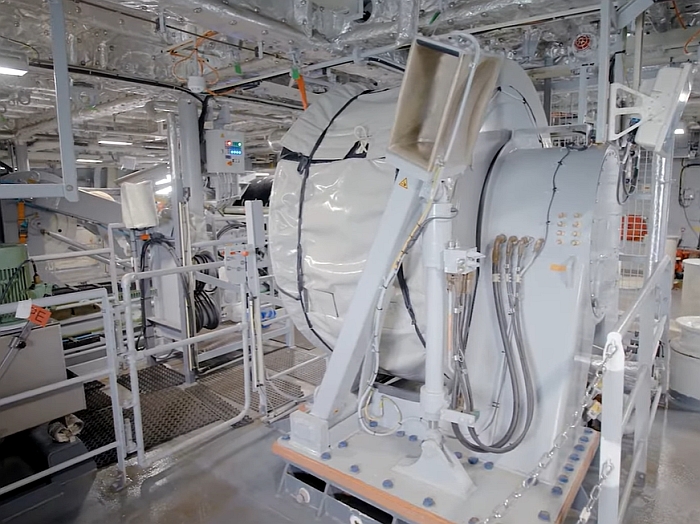
FDI羅納克上將號的艦尾聲納艙,此為CAPTAS4主/被動拖曳陣列聲納的線性被動陣列聲納的絞車

Thales集團在2016年10月歐洲海軍展(Euronaval 2016)展出的CAPTAS 4緊致型(Compact),重新設計與布置了
收放系統,並適度縮短拖曳纜繩,盡可能壓低安裝所需的面積以及重量。由左而右是CAPTAS 4原型、
緊致型(主動與線性被動聲納獨立收放操作)、緊致型(主動與線性被動聲納結合在單一拖曳系統)

Thales的CAPTAS 1輕量型主/被動拖曳聲納測試的畫面。CAPTAS 1適用於300噸級以上小型船艦。

Thales的CAPTAS 1輕量型主/被動拖曳聲納,可收容在一個20英尺集裝箱(TEU)裡
──by captain Picard
|
前言:主/被動拖曳陣列聲納 隨著潛艦靜音技術日趨進步,光靠被動聲納截收發出的連續頻聲學信號來探測潛艦的距離跟效能大打折扣。柴電潛艦潛航時只靠電機慢速推進,不像核子推進系統反應器、蒸汽渦輪熱機發出相對明顯的音響信號;而且柴電潛艦通常在近海區域活動,受到近岸大量地形雜波的干擾,而且該處由於水深過淺,只能靠直接聲學通道進行探測,距離大受限制。又,隨著潛艦外部敷設消聲瓦日益普及,一般中頻主動聲納的探測距離顯著衰減。面對敷設消聲瓦的靜音型潛艦,被動聲納只能在極短的距離(通常僅有個位數的海里甚至數百公尺)探測到一艘靜音狀態的現代化潛艦,中/高頻主動聲納的偵測效率也因為潛艦外層的消音瓦而大打折扣。 隨著1990年代靜音化柴電潛艦日益普及擴散,純粹的被動聽音反潛作業日漸困難,1990年代以來世界各主要海軍都積極發展由中/低頻主動聲納搭配被動拖曳陣列聲納聯合作業,由主動聲納拍發,由聽音性能較好的拖曳陣列聲納負責接收。如此,就能克服傳統被動拖曳陣列聲納只能被動聽音且難以迅速判斷目標方位的問題,又保有拖曳陣列聲納基陣長、遠離艦體自噪、部署深度自由的優勢。主動聲納能與被動拖曳陣列聲納可以整合成一體,隨著聲納信號處理技術進步,還發展出由多個不同位置聲納系統進行「雙基作業」(bistatic operation) 甚至「多基作業」(multistatic operation),例如以艦體主動聲納、可變深度聲納(VDS)、拖曳式進行拍發,再由被動陣列接收。而直升機的吊放式聲納也可參與多基作業,由吊放聲納拍發,然後以一條(或多條)拖曳式陣列接收。透過雙基/多基作業,單一主動聲納源由多個被動拖曳聲納截收,可大幅提高對水下目標定位的精確度(傳統單一線性陣列拖曳聲納必須靠著船艦運動調整聲納方位,比對多次不同接觸才能計算出目標方向等動態)。在多基作業下,以直昇機吊放聲納負責拍發時,以被動拖曳聲納接收的船艦平台不會暴露位置,敵方潛艦無法單憑主動聲納來源方位來迴避或反擊。 低頻主/被動拖曳陣列聲納系統顯著強化了船艦的對潛效能,甚至足以奪回水面反潛艦艇在靜音潛艦普及後喪失的先看/先發優勢,在敵方潛艦能打擊水面 船團之前先發現它。
英國ATAS主動陣列聲納 全世界第一種海軍用主/被動拖曳陣列聲納(Active Towed Array Sonar,ATAS)是由英國開發。1980年代初期,皇家海軍啟動主動拖曳陣列聲納(Active Towed Array Sonar,ATAS)的研究,其關鍵技術是低頻柔性變形換能器(flextensional transducers),在1983年開放技術轉移給民間;最初英國國防部曾向馬可尼電子(Marconi Electronic Systems,MES,或稱GEC-Marconi)旗下的馬可尼水下系統(Marconi Underwater Systems)提供這項技術,但馬可尼集團認為相對於本身發展的技術並無優勢,所以沒有接受。後來,此一技術轉移給英國航太(British Aerospace,BAe,後成為BAE Systems),作為該集團繼續發展的基礎,由BAe的海軍武器部門(Naval Weapons Division)作為主承包商,而後端處理系統(即乾端,dry end)主要由佛蘭提計算機系統(Ferranti Computer Systems Ltd)負責開發。 在1987年,ATAS的研發工作成功完成,1987年11月美國海軍向BAe購買少量ATAS使用的聲納換能器硬體,做為美國自己發展低頻主動拖曳陣列聲納的評估對象,並裝在史都華特級(Stalwart class)戰略音響監視船上測試評估。第一套ATAS在1994年交付皇家海軍;經過測試,證實ATAS利用分離的主動拖曳體發射低頻聲納信號、由線性被動陣列接收回波的方式,在遠距離探測到敵方潛艦,偵測效果十分良好,有效結合了主動聲納定位精確度高以及被動拖曳陣探測距離遠的優點
在1990年7月,英國航太動力(British Aerospace Dynamics)與法國湯森.辛特拉(Thomson-Sintra
ASM)宣布,將雙方各自在主動式拖曳陣列聲納的業務合併(Thomson
Sintra先前的產品包括DSBV-61被動拖曳陣列聲納、DSBV-62C拖曳式極低頻主動聲納等)。在1996年,湯森.辛特拉以及英國馬可尼電子(GEC-Marconi)將各自的聲納系統部門(馬可尼方面就是馬可尼水下系統)合併為湯森.馬可尼聲納(Thomson Marconi
Sonars);在2000年,湯森.辛特拉改名為Thales集團,且在同年11月購併英國Racal Electronics
plc。從1992年起,ATAS項目從BAe轉到BAe以及法國Dowty
Group合資的DowtySEMA;隨後,BAeSEMA又從Dowty
Group購買DowtySEMA的50%股份,所有作業在1992年底完成,因此ATAS至此屬於BAeSEMA。在1998年11月11日,BAe以7700萬英鎊購買SEMA,並將之與BAeSEMA合併為英國航太防衛(British
Aerospace Defence Ltd),隔年再收購Marconi Electronic Systems而合併為BAE Systems。 ATAS (V)1:純粹的主動系統,稱為低頻主動聲納(Low Frequency Active Sonar,LFAS),整合在一個包含部署控制裝置的拖曳體中,陣列長30m(其中主動部件是10m)。 ATAS (V)2:在(V)1的基礎上加裝Thomson Marconi的Lamproie處理器以及一個120m長的被動拖曳陣列(拖在拖曳體後方),成為主/被動拖曳陣列。 ATAS(V)3:整合到Thomson-CSF的Spherion艦首聲納系統中,與TSM-26 Spherion艦首聲納的信號處理器與顯控台結合,使ATAS與Spherion聲納以主動、被動模式聯合工作,此種構型就是ATAS(V)3。 而交付皇家海軍的ATAS包括一個搭載低頻主動聲納(LFAS)、含部署控制裝置的拖曳體,拖曳體上拖著一個長300m的線性被動拖曳陣列(應是由15個20公尺長陣列單元構成);拖曳纜繩長達700公尺,拖曳纜繩連結主動拖曳體,主動拖曳體再連結線性拖曳陣列。 ATAS的低頻主動聲納(LFAS)的聲納發射機安裝在一個強化玻璃纖維(GRP)製造的拖曳體內,由兩個以垂直排列(vertical stave)的圓柱型低頻柔性變形換能器(flextensional transducers)基陣構成;每個換能器基陣由10個低頻壓電陶瓷片堆疊(piezo-ceramic stack)構成,封裝在橢圓形(elliptical)外殼內,以以活塞模式(piston mode)運作,換能器由鋯鈦 酸鉛壓電材料製造。這個外殼的柔性機械特性,提供了產生低頻信號所需的大體量位移。主動發射陣列裝在鋁質或玻璃纖維強化塑膠製作的拖曳體內,拖曳體上裝置控制部署深度的阻浮器,阻浮器本 身也連結線性被動拖曳陣列。BAe的柔性變形換能器重量不到3公斤,可組裝成陣列(array)或垂直排列,用於產生特定應用的波形。ATAS的主動聲納部位能實施水平全向發射,而垂直波束寬度為25度,峰值發射功率25KW。 ATAS的每個線性被動接收陣列單元包含32組水聽器,裝在長20公尺的彈性管中,直徑63.5mm;線性陣列經過波束形成而形成360度全方位角(azimuth)覆蓋,並在橫向波束(broadside beam)裡實現0.5度的方位解析度(bearing resolution)。水聲信號以單一串行數據流(single serial data stream)的形式傳輸到艦載電子設備,進而將電纜直徑降至最小。為了取得最好的偵測效果,部署時主動拖曳體與被動線性陣列應保持在同一深度。
ATAS被動陣列聲納聽音陣列的聽音單元是英國國防部在1980年代開發,由三個水聽器以「品」字型
所構成,通過計算聲學信號抵達三個水聽器的時間差,直接計算出目標距離。傳統的單線式低頻拖曳陣列聲納多以聲波訊號依序抵達陣列各單元的時差(Time
Difference of Arrial,TDOA)來計算信號來源距離陣列的角度,
這種方法不能分辨目標是在陣列聲納的左側或右側;因此聲納接觸之後,艦艇需要轉向再次進行監聽;在新的航向上,拖曳陣列聲納定出的兩側信號中,一定有一個方位會與在原本航向定義的方向重疊,而這就是目標的正確方向。而ATAS的三體聽音陣列便克服了這種難以分辨方位的老問題,通過單一聲學信號就能直接判斷方位,解析度非常高。在冷戰後期,英國打算將此種三體換能器用於跟美國合作開發的水面船艦魚雷防禦系統(Surface
Ship Torpedo Defense System,SSTD),以快速偵測敵方來襲魚雷的方位;冷戰結束後美國擱置SSTD,英國則改與法國合作,因而促成BAe與Thomson-CSF的主動拖曳陣列聲納業務合併。 1990年代初期BAe與Thomson-CSF將雙方主動拖曳陣列聲納業務合併後,Thomson-Sintra將ATAS與本身的Spherion艦首聲納整合在一起,於是ATAS被整合到修改後的TSM-26 Spherion艦首聲納的信號處理器與顯控台中,此種構型就是ATAS(V)3。 ATAS的處理系統重7000kg,後端顯示器/處理器機櫃重280kg;主動聲納的發射機(Transmitter)重200kg,工作頻率約3K~3.5KHz,峰值功率25KW;電纜纜線重1500kg,長900m(約1000碼)。ATAS作業時,船艦航速介於5至20節之間,最大有效拖曳速度約20到25節,極限的破損拖曳速度約30節,能在六及海象部署操作;以15節拖曳速率時,最大部署深度約235m。 ATAS的主動模式工作頻率約3KHz,被動工作頻帶約2~4KHz(有2.7、3.0、3.3等三種頻率可選擇),工作方式包括主動調頻脈衝、主動連續波脈衝和被動聽音警戒,此外還有自動追蹤和魚雷警告等功能。 ATAS(V)3的VDS最大偵測距離約64km,最大施放深度為235m,操作頻率為3.5KHz,能同時自動追蹤10個目標;負責處理被動陣列聲納信號的Lamproie聲納信號處理器具備寬頻與窄頻監聽模式,擁有監聽、偵測、識別與定位的功能,最大偵測距離約100km,能將接收到的訊號與聲紋資料庫比對,以辨識目標種類,此外也負責接收VDS的低頻主動聲納波。 ATAS最早得到的外銷訂單是1992年台灣隨六艘康定級巡防艦所採購的系統,屬於 ATAS(V)3(部分資料指出是 ATAS(V)2,但由於實質上與Spherion艦首聲納整合,所以實際上是ATAS(V)3);首批兩套在1996年交付台灣,第二批兩套在1997年交付,第三批兩套1998年交付;此外,早期還有消息說台灣另外買五套ATAS來裝備於成功級巡防艦,不過並未實現。 1993年,消息傳出巴基斯坦購買六套ATAS系統,裝備於購自英國的Type 21巡防艦(巴基斯坦稱為Tariq級),前兩套在1993年安裝,其餘在1994年安裝完畢。在1994年12月,消息傳出安曼訂購三套ATAS來裝備於Al Bushra級巡邏艦;而安曼在1996年接收的兩艘英製Qahir級巡防艦同樣配備ATAS系統。此外,也有消息傳出阿拉伯聯合酋長國(UAE)在1994年購買三套ATAS來裝備規劃中的新巡防艦,不過後續並沒有消息證實這項合約成立。在1999年,已知的最後一套ATAS交付(應是台灣的訂單)。
CAPTAS 在1990年代,Thomson-CSF(2000年成為Thales集團)以ATAS的系統架構為基礎,整合更新的科技,推出整合主/被動拖曳陣列聲納(Combined Active/Passive TowedArray Sonar,CAPTAS),結合可變深度聲納(Variable Depth Sonar,VDS)以及線性被動陣列聲納。CAPTAS基本上是由船艦拖帶一個拖曳體,拖曳體緊跟著一條能提供實時目標分辨以及魚雷探測能力的線性陣列。先前ATAS(V)3的主動聲納部分頻率為3.5KHz,仍算不上真正的極低頻;而CAPTAS的主動聲納的工作頻率則更低。 CAPTAS的主動聲納部分是一個採用FFR(Free Flooded Ring)技術的低頻主動拖曳體(Towed Body,TB),透過一個緊致的基陣來發射或傳輸高品質聲納信號,拖曳體上結合了能控制部署深度的裝置;至於被動聲納部分則是拖曳纜線上的被動聽音陣列,陣列使用能直接識別聲源方位的「品」字型三體換能器;此外,聽音陣列還使用FFR傳輸技術來提高聲納信號傳遞品質。 後端的信號處理系統採用開放式架構以及COTS商規組件,易於維護升級。 CAPTAS系列的被動聽音頻率範圍約0.1~2.0KHz,表尺距離達144000碼,操作模式包含FM、CW、COMBO、BPSK、PTFM,在600Hz以上的操作頻率能直接分辨信號來源在左側或右側;主動聲納可根據客戶需求而選擇垂直安裝2個 (CAPTAS-2)或4個(CAPTAS-4)垂直換能器,被動聽音陣列的單元數量也可依照需求來調整。 CAPTAS是2000年代初期西方最具代表性的先進低頻主/被動拖曳陣列聲納系統。CAPTAS優異的低頻主動能力也曾引發美國關注,美國反對北約盟國在市場上任意出售操作頻率低於1KHz的 主動聲納換能器技術。 CAPTAS Mk.2
(上與下)CAPTAS Mk.2的主動拖曳體。
CAPTAS Mk.2是CAPTAS首先推出的型號之(又稱UMS 4229或Type 4229)。主動聲納工作頻率約0.95~2.4KHz(脈衝長度1至16秒),被動聲納工作頻率約900~2100Hz,頻寬4KHz以上,距離精確度100m,角精確度1度,最大探測距離約131.67km。而主動拖曳體的尺寸約為2m x 1m x 1.2m,重1250kg。被動拖曳陣長度約90m,直徑85mm,重2490kg,而處理主/被動拖曳體的收放系統(含絞車)重15000kg,尺寸6.4m x 2.1m x 4.4m,拖曳纜繩長度有264m(重型粗線)或500m(輕型細線)兩種。CAPTAS Mk.2能在10分鐘內部署或收回,最大拖曳速度約30節 (能確保硬體不毀損,但此種高速下聲納無法有效操作),最大部署深度約250至350m,最高能在6級海象操作。 CAPTAS-2採用主/被動拖曳體合一的設計,全系統尺寸6.26m x 3.15m x 2.1m,總重16噸。主動聲納與線性被動陣列聲納都部署在同一個拖曳體上;拖曳體連結了線性被動陣列,拖曳體前方則安裝主動部位。拖曳體能控制部署深度,最高能在250m深處操作。被動拖曳陣列包括128個品字形三體換能器。 CAPTAS系列第一個外銷實績是1997年法國出售給沙烏地阿拉伯的利亞德級(Al Riyadh class)巡防艦CAPTAS-2(待查證);第二個是挪威南森級(Fridjof Nansen class)巡防艦的CAPTAS-2 V1。韓國KDX-3世宗大王級神盾驅逐艦也裝備CAPTAS-2,阿拉伯聯合大公國在2009年8月向義大利訂購的阿布達比級(Abu-Dhabi class)配備CAPTAS-2,馬來西亞在2011年簽約購買的法製Gowind巡防艦(馬來西亞稱為SGPV-LCS)也配備CAPTAS-2系統。CAPTAS從2002年起開始服役。
CAPTAS Mk.4/UMS -4249
CAPTAS-4的內部配置,主動拖曳體與被動線性陣列各由一套獨立的絞車施放。
而CAPTAS Mk.4(CAPTAS 4,又稱UMS 4249或Type 4249)使用功率更大的主動拖曳體,主、被動部分也被分開;低頻主動聲納(LFAS)的拖曳體由拖曳浮體處理系統(Towed Body Handling System)收放,而被動拖曳陣列則由拖曳陣列處理系統(Towed Array Handling System)收放,拖曳陣列末端設有流體力學拖曳體(hydrodynamic body),可精確控制拖曳陣列聲納的部署深度。CAPTAS-4的LFAS的主動拖曳體結合四個縱向排列的環形換能器(早期CAPTAS V2與MK2 V1的主動部位只有兩個環形換能器),總共有32個發射器,工作頻率0.95~2.4KHz(日後延伸到0.5~5KHz)。被動被動聽音陣列(操作頻率0.1~2KHz)的單元由品字形三體換能器構成,在約600Hz以上的操作頻率能直接分辨聲源方位來自於左邊或右邊,而不需要仰賴艦艇轉向。CAPTAS-4能在10分鐘內部署或收回,最大拖曳速度約30節(能確保硬體不毀損,但此種高速下聲納無法有效操作),最大部署深度約350m,最高能在6級海象操作。UMS -4249被法/義合作的歐洲多任務巡防艦(FREMM)採用 。 美國也採購若干套Type 2087拖曳陣列聲納(CAPTAS Mk.4結合英國後端處理設備)用於LCS近海戰鬥艦艇的反潛任務套件之中,作為美國AN/SQR-20整合式多功能托曳陣列聲納(MFTA)服役前的過渡性裝備;而到2022年3月底,美國海軍正式宣佈購買CAPTAS-4來裝備星座級(Constellation class)飛彈巡防艦,放棄本身開發的AN/SQS-62可變深度聲納。 英國Type 2087主/被動拖曳陣列聲納 英國在2000年代為升級Type 23巡防艦而開發的Type 2087低頻主/被動拖曳陣列聲納,採用CAPTAS-4的水聲感測器硬體架構為基礎,結合英國的後端控制系統與軟體,包含四個DRS Technologies的OPUS-2單螢幕多功能操控台。Type 2087的感測器包括獨立的主動與被動拖曳體(不同於CAPTAS MK2與MK2 V1採用主/被動拖曳體合一的設計),分別由艦尾兩個不同絞車施放 ;其中,低頻主動聲納(LFAS)的拖曳體由拖曳浮體處理系統(Towed Body Handling System)收放,設置在艦尾左側,而被動拖曳陣列則由拖曳陣列處理系統(Towed Array Handling System)收放,拖曳纜線從Type 23巡防艦原本位於艦尾中線的Type 2031拖曳陣列聲納的施放口收放。 皇家海軍從2005年起展開Type 2087聲納的換裝作業,2006年起正式進入皇家海軍服役 ,在2007年11月達成初始操作能力(IOC),全部換裝工作於2012年完成。 由於預算限制,皇家海軍只能維持八艘巡防艦擔任拖曳聲納巡邏船(Towed Array Patrol Ship,TAPS)勤務,僅購買了八套Type-2087聲納來裝備Type 23(共耗資1.66億英鎊),另外五艘被排除,分別是摩爾斯頓號(HMS Montrose F236)、蒙茅茲號(HMS Monmouth F235)、鐵公爵號(HMSIron Duke F234)、蘭開斯特號(HMS Lancaster F229) 、阿蓋爾號(HMS Argyll F231)。Type 23巡防艦加裝Type 2087聲納除了要一併安裝相當複雜的收放系統與支持組件之外,還牽涉到許多纜線修改以及加裝後端設備;因此,被排除在2087型聲納的五艘Type 23由於欠缺這些基礎設施修改,沒辦法迅速轉用這套系統。 Type 2087型的整體性能優異,無論深水或淺水操作性能與主/被動工作效率都大大超過了Type 23巡防艦上原有的Type 2031Z,在演習中面對扮演假想敵的英國核能潛艦時,可展現數十海里 級有效偵測能力,使其遠在潛艦魚雷攻擊範圍之外就獲得相當程度的目標範圍(以往英國反潛艦面對英國核能潛艦之類的現代化潛艦時,有效偵測距離只剩下個位數 的海里),然後輕鬆地以艦上的梅林反潛直昇機迅速前往確認並解決目標; 皇家海軍認為擁有長距離有效偵測潛艦的2087型聲納之後,使水面艦在面對現代化靜音潛艦時,更容易奪回喪失已久的作戰優勢,在敵方潛艦能打擊己方水面 船團之前就先發現它,並輕鬆地指揮反潛直昇機前往潛艦附近加以解決。Type 2087型所費不貲,每套總價將近6000萬英鎊,拖曳體與絞車佔據直昇機甲板與 機庫下方大部分空間,服役早期也發現拖曳體的單纜絞車在作業時經常卡住,未來可能將以雙纜絞車取代。 在2016年12月,皇家海軍與Cohort plc集團旗下的系統工程評估(Systems Engineering & Assessment Ltd ,SEA) 公司簽署一系列針對皇家海軍各型艦載聲納、水聲裝備的支持合約,包括Type 2087拖曳陣列聲納的科技更新第二階段(Technology Refresh Phase 2)。在2017年,皇家海軍的Type 2087拖曳陣列聲納進行了更新升級,稱為反潛矛頭(ASW Spearhead)項目,包括更新後處理端,納入機敏級核子攻擊潛艦使用的Type- 2076聲納的被動聲納演算法以及人機介面(Human-Computer Interface,HCI)技術,例如結合人工智能(AI)的應用軟件,顯著提高了系統的信號處理能力。Type 2076 與 TType 2087 採共通的開放式架構(open architecture),並持續透過軟體與處理器升級改進。 在2023年9月中旬英國國際防務裝備展(DSEI 2023)期間,皇家海軍透露已經展開Type 2087低頻主/被動拖曳陣列聲納升級項目,稱為能力插入套件(Capability Insertion Package,CIP);在2022年9月,Thales集團獲得價值1.1億英鎊合約,負責執行2087拖曳陣列聲納設計當局能力插入項目(Sonar 2087 Design Authority Capability Insertion Project,S2087 DA-CIP),負責升級項目的採辦以及安裝等作業,合約效期42個月,此外還附帶增加1年的選擇權。 DA-CIP項目中,Thales集團會評估幾個由不同次承包商提供的升級方案(以軟體為主),主要是關於提升探測與追蹤能力、改進人機介面設計、新增決策輔助(decision aids)以及訓練功能等。2087 CIP項目在2023年1月進行首次海上測試,並配合Type 23巡防艦的例行翻修、升級期程來安裝。
CAPTAS-4緊致型
CAPTAS-4緊致型的構型,安裝佔用的面積比原本減少將近五成,重量減少約 二成。此圖片是主動變深聲納、被動拖曳陣列聲納分開操做的獨立拖曳系統。
在2016年10月舉辦的歐洲海軍展(Euronaval 2016)中,法國Thales首度公布CAPTAS-4緊致型(Compact)。CAPTAS-4緊致型的工程開發始於2013年 ,主要的研究方向是重新設計、布置更緊湊的收放系統,來減少佔用的體積以及重量。CAPTAS-4緊致型共開發了兩種版本,包括維持將低頻主動變深聲納與拖曳陣列被動聲納陣列 分開操作的獨立拖曳系統(independent tow system),以及將主動聲納與被動拖曳陣列結合在一起的依賴式拖曳系統(dependent tow system,類似CAPTAS MK.2)。 依照法國Thales的資料,原本CAPTAS-4安裝佔用面積是84平方公尺,重34噸;而緊致型CAPTAS-4的兩種版本中,主/被動系統各自獨立拖曳的版本重量減至25噸,而兩者結合的依賴式拖曳系統的重量減至20噸。除了改變系統佈局外,CAPTAS-4緊致型的聲納拖曳體也引進更輕的新型材料,並進行系統最佳化;同時,將拖曳纜繩長度從原本300m減低到200m,如此可以減少11噸的重量。Thales宣稱,依照客戶的意見,大多數時候並沒有將聲納部署到300m深度的需求,因此拖曳纜繩能適度縮短。整體而言,與原本的CAPTAS-4相較,CAPTAS-4緊致型的系統重量減輕約二成左右,安裝佔用的面積減少將近五成,但大致維持同級的性能(只有纜繩縮短而影響部分能力)。 CAPTAS-4緊致型的開發,相當程度是由與美國LCS濱海作戰艦艇計畫所推動;美國海軍測試CAPTAS-4作為LCS的反潛套件若干年,且CAPTAS-4也是洛馬集團提供的先進水聲概念(Advanced Acoustics Concepts,AAC)套件的一環。在美國海軍測試CAPTAS-4期間,Thales感到CAPTAS-4對於LCS這樣三千噸級以下的艦艇實在太大,必須縮減體積與重量;Thales提供給美國海軍的CAPTAS-4就是緊致與輕量化的版本,這也成為了CAPTAS-4緊致型的基礎。法國海軍在2017年開始建造的中型通用巡防艦(Frégate de Taille Intermédiaire,FTI ),就打算使用CAPTAS-4緊致型;而同時期英國規劃的Type 31巡防艦也是CAPTAS-4的潛在客戶。 CAPTAS Nano 早期CAPTAS有縮小廉價版的CAPTAS Nano,結合了Thales在1990年代後期參與澳洲的「澳洲水面艦拖曳陣列聲納」(ASSTASS)的工程經驗;為了節省成本與體積,CAPTAS Nano將主/被動功能結合在一條長64m的單一拖曳陣列中,主動發射頻率約1KHz。 CAPTAS Mk.1
Thales的CAPTAS 1輕量型主/被動拖曳聲納測試畫面 CAPTAS Mk.1(CAPTAS-1)在2014年歐洲海軍展(Euronaval 2014)首次公開,是CAPTAS的輕量緊致版本,用於300噸級以上小型船艦。在2016年,CAPTAS-1曾在CNIM的L-CAT登陸載具上進行測試。在2019年倫敦防衛裝備展(DSEI 2019)中,Thales集團宣布,CAPTAS Mk.1會在法國海軍第四艘Loire級近岸支援船Garonne號上進行測試。在2017年NAVDEX 2017展中,阿拉伯聯合酋長國海軍宣布引進CAPTAS-1;依照Thales的消息,已經有多個用戶選擇此型聲納。在2022年底,消息透露台灣也會採用CAPTAS-1來裝備新造與現役船艦。 CAPTAS Mk.1全套系統能裝在一個20英尺集裝箱(TEU)裡,便於運輸跟部署。CAPTAS Mk.1全全系統尺寸4.3m x 1.7m x 2.05m,總重8噸。CAPTAS Mk.1的主動聲納工作頻率約2KHz,脈衝長度至高8秒,脈衝模式包括調頻(FM)、連續波(CW) 與混合(COMBO),具備寬頻工作能力來對抗混響(reverberation)效果。CAPTAS Mk.1能在六級海象以內操作,最大拖曳深度230m,船艦航速12節時最大拖曳深度為110m,探測距離可達第一匯聚區。
|




